水声导航设备抗干扰能力提升方法研究
2019-10-14李杨康林
李杨 康林
(1.海军研究院,北京,100161;2.中船重工海声科技有限公司,宜昌,443005)
水声导航设备是船舶航行保障的重要装备,其工作性能直接影响到船舶航行安全。水声导航设备通常包括单波束测深仪、多普勒计程仪等,均属于主动声呐范畴,具有相似的工作原理[1]。在实际使用环境中,海洋环境复杂多变、安装平台特性各不相同等因素均可能对水声导航设备造成各种干扰,导致设备工作性能降低。
本文以单波束测深仪为具体研究对象,从干扰源和回波检测方法两个方面进行分析研究,提出抗干扰解决方法,通过自编仿真软件,用航行试验数据进行算法验证。
1 干扰源分析
测深仪作为主动声呐设备,当噪声为主要背景干扰时,满足主动声呐方程[2]15-16:

式中,SL为声源级,TL为传播损失,TS为目标强度,NL为工作带宽内噪声级,DI为换能器指向性,DT为检测阈值。
当海洋混响为主要背景干扰时,使用混响级RL代替各向同性环境噪声干扰(NL–DI),则主动声呐方程变为:

同时,考虑到在实际应用过程中气泡对设备的干扰,则影响测深仪工作性能的主要干扰因素为噪声(NL)、海洋混响(RL)和气泡等。
1.1 噪声干扰
典型的噪声干扰源有两大类:海洋环境噪声和船舶自噪声[2]162-169。噪声干扰对设备接收回波信号的具体影响可参看航行数据,高噪声影响下的回波信号如图1所示。

图1 高噪声背景回波信号
当环境噪声增强时,回波时域信号淹没在环境噪声中,信噪比减小,通过现有检测方法无法提取到有效的回波时延信息,从而影响设备工作性能。
1.2 海洋混响干扰
混响是海洋中大量的不规则散射体(如海洋生物、泥沙等)对入射信号产生的散射波在接收点处叠加而形成的。根据形成原因,可将混响分为三类[2]277-284:体积混响、海底混响和海面混响。当混响成为主要的背景干扰,在海底混响-海面混响的共同作用下,设备会接收到多次回波信号,如图2所示。

图2 混响干扰下接收信号
由于测深仪工作的信号回波源自海底对声波的散射,所以海底混响直接影响回波信号大小。实测数据表明,海底散射强度主要受海底底质、掠射角和声波频率等因素影响[3]。航行过程中由于海底底质的变化和海底坡度起伏,海底散射强度将处于一个实时变化的过程中。根据设备历史数据统计,其变化范围集中在-30~-10 dB,导致设备接收到的海底反射回波信号幅度是动态变化的。
1.3 气泡干扰
船舶在航行过程中,船体与海水的相互作用导致船体底部水流中包含数量不等的气泡;船舶系泊时,气泡会依附在换能器辐射面形成具有屏蔽效果的气泡层。根据设备历史数据统计,气泡层集中出现在船舶下方3.5 m以内。海水中气泡对测深仪的影响主要有以下两个方面。
1.3.1 气泡对声波的吸收作用
海水中气泡在入射声波的作用下,作受迫振动,并作为次级声源往周围辐射能量,这个吸收声能量的过程,导致入射声波强度减弱。
1.3.2 气泡对声波的散射作用
由于海水中气泡的存在,声传播介质会表现出不均匀、不连续性,声音在该介质中传播会产生强烈的散射作用。致使声波在经过气泡层之后强度减弱。同时由于散射波在换能器接收端的叠加,其作为虚假回波信号出现在接收回波中,将干扰设备正常工作。
2 回波信号检测方法
测深仪在发射脉冲信号后,最主要的任务就是接收回波信号和回波信号时延的测定。目前常用的回波检测及时延测定方法主要有能量检测法和特征参量相关检测法[4]。
2.1 能量检测法
幅度及能量特征是直接反映测深仪接收回波特点的参数,最简单最通用的回波检测方法是能量检测法[5],具体包括回波前沿幅度门限检测、回波幅度极大值检测和能量中心收敛检测。这三种检测方法都是对信号幅度信息进行单次检测判定,数据处理简单快捷,但对随机噪声干扰敏感,需要较高信噪比,在近距离检测时使用较为理想。在远距离检测中,由于存在声波的传播损失,距离越远回波信噪比越低,幅度检测可靠性也越低。
2.2 特征参量相关检测
当系统的输出(回波信号)是输入(发射信号)作用于系统(声信道)的结果时,输出与输入将是相关的,其相关性由输入与输出之间的互相关函数RXY(t1,t2)描述[6]55。利用该原理,通过计算回波信号和已知发射时延信号的互相关函数,寻找其峰值,便可获得回波信号时延。
由于噪声干扰与回波信号不存在相关性,互相关函数对随机噪声具有抑制作用,因此该检测方法具有较好的抗噪声干扰能力。由于浅水区域海面混响、海底-海面混响等为主要背景干扰,具有和海底回波信号相似的特征参量,同发射信号具有相关性,所以该检测方法在近距离测量中效果不理想。
2.3 测深仪回波检测方法实例
目前某型测深仪的回波检测同时采用能量检测法及特征参量相关检测法,其具体检测机制如下:(1)近距离同时使用两种检测方法,优先选用能量检测结果;远距离使用特征参量相关检测法;(2)能量检测使用幅度判决的同时,增加脉冲宽度判决以降低对噪声的敏感度。检测流程如图3所示。
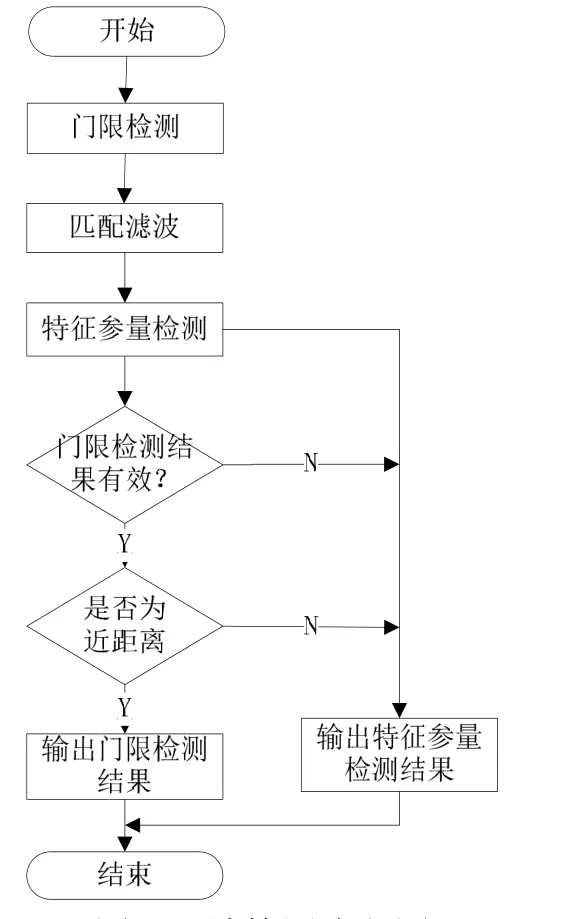
图3 回波检测流程图
测深仪检测信号为已知信号,对于已知信号来说,最大信噪比准则下的最佳线性检测系统为匹配滤波器[7]。匹配滤波器可以在输出端给出最大瞬时功率信噪比,且只与输入信号能量E、白噪声功率谱密度N0/2有关,即输出最大信噪比2E/N0。
根据测深仪工作原理可知,只需检测回波信号时延信息,即可得到深度结果,而无需关注信号的频率等特性。因此,采用回波包络进行匹配滤波就可以完成检测目的。对包络匹配滤波器的滤波效果进行仿真,仿真条件为带通采样率16 kHz、长度256 ms、中心频率20 kHz的单频脉冲信号,带通滤波器带宽为2 kHz,信噪比为-60 dB的白噪声。加入噪声的信号先进行平方检波,然后求得信号包络级,对信号包络级进行匹配滤波。匹配波形为长度256 ms的方波信号。仿真结果如图4所示。
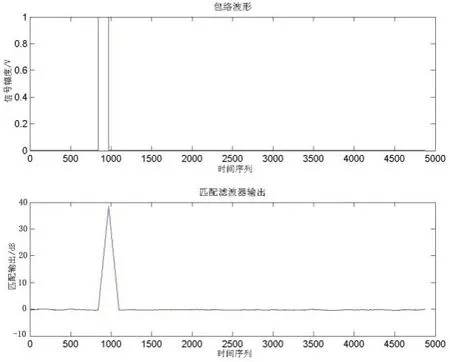
图4 匹配滤波器效果
测深仪设计过程中为了压缩动态范围,接收机采用时间增益控制技术[8](Time Gian Control, TGC)。在整个量程中,接收机输出的噪声也会随着时间的增加而呈逐渐增大之势。此时,匹配滤波器输出也会随噪声增大而增大,因此存在匹配滤波输出峰值不是回波真正到达时刻的可能。

图5 真实回波信号匹配滤波示意图
3 抗干扰能力提升解决方法
影响测深仪等水声导航设备工作性能的主要因素为:(1)海洋环境噪声、平台噪声、体积混响等均增加了设备的背景噪声,降低了回波信号的信噪比;(2)海底底质、坡度,以及海水中气泡的声波吸收等均可能减弱海底回波信号级;(3)各影响因素的不稳定性,导致回波信号幅度大小和信噪比都处于一个动态变化的过程中;(4)海水中气泡层的声波散射可能导致多次回波的出现,能量检测或相关检测都会受到干扰;(5)匹配滤波输出结果由于TGC存在与理论不一致的情况(图5),造成设备性能降低。通过理论及试验数据分析等途径,在上述检测算法基础上,提出如下抗干扰能力提升解决方法:(1)采用经优化的匹配滤波器,对回波包络进行滤波,优化匹配输出结果;(2)采用动态门限检测技术,以适应设备工作中信号动态变化的情况,降低外界干扰影响;(3)采用气泡窗口抑制技术,降低气泡影响;(4)基于曲线拟合技术,实现海底跟踪,提高正确检测率,降低测深误报率和失捕概率。
3.1 优化匹配滤波器
为避免随时间增大的噪声使匹配滤波输出的最大值不是回波真正到达时刻的问题,需将接收机输出的噪声背景平稳均衡。针对测深仪回波包络脉冲,采用优化后的匹配滤波器[9],其冲击响应函数为:

滤波输出如图6所示。这种匹配滤波冲击响应的滤波效果达到了很好的噪声背景平稳作用,经过一定时延后,优化匹配滤波后输出的最大值就是脉冲到达时刻。
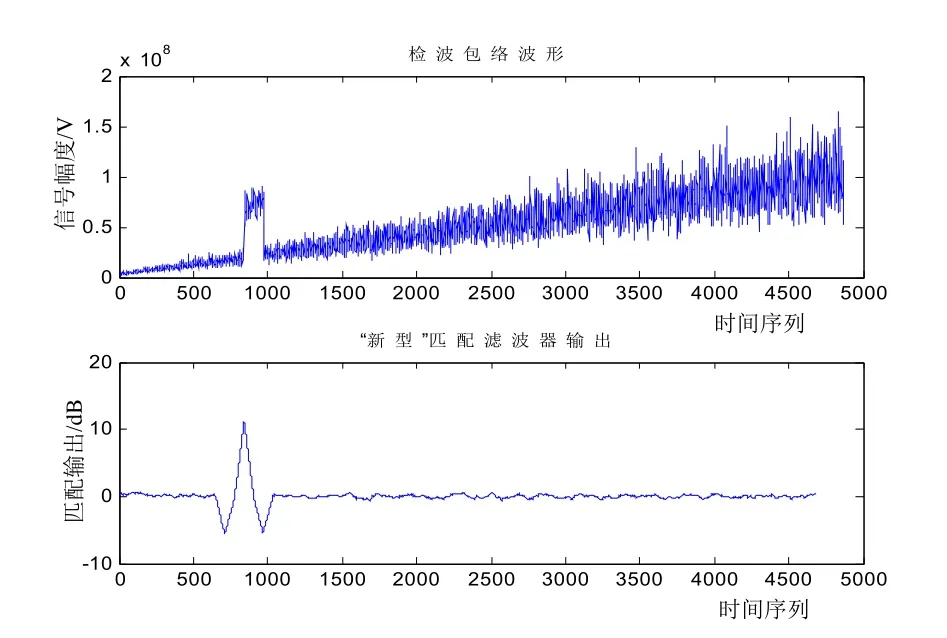
图6 优化匹配滤波器输出
3.2 动态门限检测
测深仪工作时,由于外界多种干扰源的共同作用,导致接收回波信号信噪比处在一个动态变化的过程中。采用固定幅度门限不利于海底回波信号的检测,因此提出采用动态门限检测来替代固定门限检测,从而减低外界干扰的影响[10]。
设固定幅度门限为DT0,动态门限为DT0±6,每次检测阈值的选定满足:

式中,DT为当前检测阈值;DT0为初始检测阈值;SLr为上一次检测到的海底回波幅度值;50为采用压缩动态范围之后的回波基准值,时间增益不同,取值不同。
3.3 气泡窗口抑制
针对气泡干扰,根据航行中气泡出现位置的统计特性,引入“气泡窗口深度”这一概念,作为气泡识别区。“气泡窗口深度”定义如下:

式中,Ha为换能器辐射面到气泡层的距离,Hb为气泡层厚度,Pulse为发射脉冲宽度等效距离。
当气泡存在时,根据气泡统计特性,其反射回波对应深度将大概率的出现在“气泡窗口深度”以内。为了降低气泡的干扰,则将“气泡窗口深度”范围出现的测量结果置信度降低,优先采用“气泡窗口深度”以外的检测结果。
3.4 曲线拟合法
动态门限检测法中,当检测阈值减小时,必定导致虚警概率增加、误报次数增加。气泡窗口抑制方法优先检测“气泡窗口深度”之外的回波信号,该方法导致设备在“气泡窗口深度”范围内检测灵敏度降低。针对这两种检测方法的不足,基于海底基本缓变的特点,充分利用历史测量数据作为先验数据,进行数据拟合[11],为海底真实回波检测提供参考。
采用最小二乘法对样本数据进行曲线拟合[6]233。考虑到海底在变化过程中出现山谷和山峰,即“∨”和“∧”的变化过程,遂拟合方程选用如下二次方程:

给定数据(xi,yi)(i=0,1,2,…,n–1),其中n为样本量,式(6)可表示为:

最小二乘法拟合使得拟合误差平方和最小,则其拟合误差平方和[6]234:

上式中xi和yi为历次测量值。为使上式取值最小,则其关于的一阶导数应为零:

即


根据上式获得其增广矩阵,通过行变化即可求出二次方程的系数
通过二次曲线拟合预估深度,再将实测深度与预估深度比较,实测数据与预估数据误差小于统计样本方差的1.5倍,则显示输出真实测量深度,否则显示输出预估深度。
4 仿真验证
采用本文抗干扰能力提升解决方法,编制测深仪仿真检测软件,并利用实际航行数据进行仿真验证。仿真试验结果见表1,统计对比结果见表2。

表1 航行数据仿真试验结果对照表
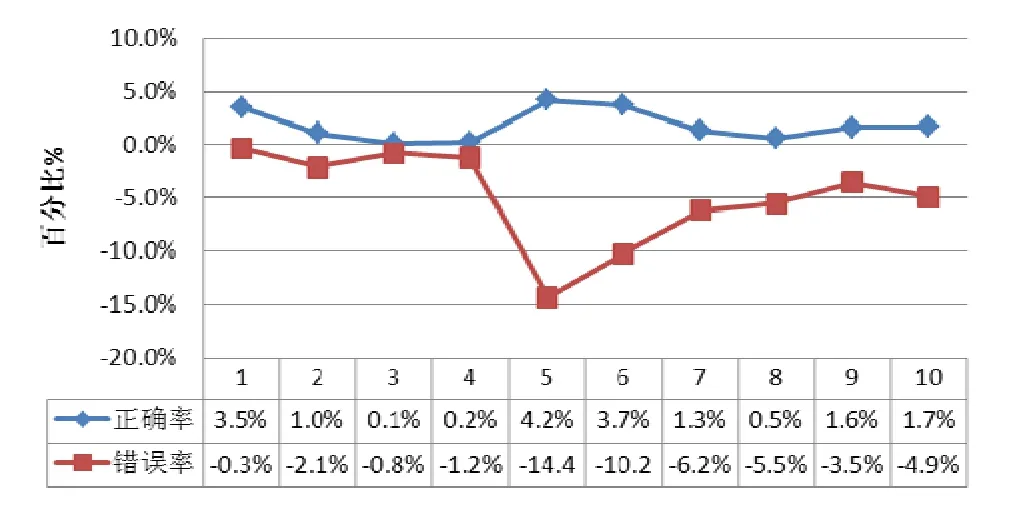
表2 检测结果统计表
根据以上两个测量结果统计对比表,从航行数据检测结果分析得出,正确检测次数整体得到提高,提高比率约0.1%到5%;错误检测(虚警)次数大大降低,降低比率约0.3%到14.4%,统计所有仿真结果错误次数从17 140次降低到1 016次,虚警降低4.9%;正确检测次数得到提高,从307 313次提升到312 752次,提高了1.65%。综上所述,本文提出的抗干扰能力提升方法可有效提升设备整体检测性能。
5 结论
通过对水声导航设备工作原理及干扰源分析研究,结合测深仪实验数据进行了分析验证,结果显示本文提出的抗干扰能力途径有效可行。该方法已应用于某型设备,并取得良好测量效果。由于水声环境的复杂多样性,尤其是气泡干扰在实际使用中对声学设备的影响,还有待进一步研究及试验验证。
