水下航行器热尾流目标海平面探测红外成像仿真
2019-10-10张昊春曲博岩
张昊春,曲博岩,金 亮,马 超
(哈尔滨工业大学 能源科学与工程学院,黑龙江 哈尔滨 150001)
引言
水下航行体在水面状态及通气管状态航行或充电时,推进系统排出的热废气、热冷却水所留下的热踪迹,即使在相当深的水下航行仍难以消失,经一段时间浮升至海平面,呈现一种高温轨迹的温度特有迹象[1]。近年来随着遥感技术的发展与现代先进红外探测设备的探测精度不断提高,针对水下航行体热尾流红外特征的探测研究具有重要意义[2]。
杨立等[3]开展了水下航行体热尾流的理论和实验研究,得到了水下航行体热尾流在稳定分层环境中的浮升规律。张健等[4]搭建了水下航行体尾流排放模拟实验平台,并通过实验分析了水下航行器排放冷却水温度特征。顾建农等[5]在热分层环境下进行了船模尾流温度分布与扩展规律的试验研究,得到了不同航速、潜深、热排放参数等条件对尾流温度场的影响,分析了影响尾流水面红外特征的因素。王成安等[6]模拟了潜艇热尾流的排放过程,分析了复杂天气条件如海风、海雾对海平面场景的影响。Kirk等[7]采用CAMEO-SIM对海平面可见光波段进行了成像模拟,并考虑了云影在海洋表面的影响。此外,Voropayev等[8]通过理论和实验研究了舰船在具有垂直温度分层的水体中航行时,由于螺旋桨和船体的扰动而形成的水面冷尾流的红外特征。张昊春等[9]对比分析了温度分层和均匀环境介质中热尾流的形成、浮升和衰减过程的特性。Schwenger等[10]提出了动态海洋场景和静态天空三维红外成像模拟方法。战杰等[11]针对红外弱小目标图像人工识别困难的问题,提出了一种基于模糊C均值(FCM)聚类技术的红外图像增强算法。李晓龙等[12]针对含有强起伏边缘背景的靶场红外测量图像,提出了一种先局部梯度中值滤波后中值滤波的组合滤波算法。Lapierre等[13]采用Python语言开发了一种舰船红外成像模拟的开源仿真软件,用于舰船红外隐身设计。熊艳飞等[14]基于三角面元求解海平面发射率,建立海平面红外辐射模型和红外成像模型,实现了粗糙海平面辐射灰度图像仿真模拟,并分析了天顶角对红外成像的影响。王蛟龙等[15]基于背景海面和尾迹区域的几何差异,建立了Kelvin尾迹的红外发射模型,得到不同海平面风速、不同舰船航速和不同探测天顶角下的红外特征仿真图像。张旭升等[16]采用龙鲨Ⅱ号核潜艇简化模型为研究对象,开展了均匀和非均匀海洋环境中尾流浮升规律和海平面温度分布特性的研究。张昊春等[17]综合考虑波动海平面的遮挡和周围环境对热尾流辐射亮度的影响,建立了热尾流红外辐射模型,得到了热尾流红外辐射特性与风速、探测器高低角和尾流温度之间的关系。
热尾流所处的背景环境比较复杂,影响其红外特性的因素有海平面发射率、天空辐射、阴影遮挡系数、环境大气温度湿度与探测条件等等[18-19]。考虑各种影响因素,为获得不同条件与工况下的热尾流红外图像,需要大量的实验测量数据,工作量比较大,且很难在某一外部条件下进行重复实验。通过成像仿真技术对热尾流目标及背景海面进行模拟,能够得到其不同条件下的红外辐射能量分布场,从而极大地降低红外成像测定的实验成本,进而得到不同控制因素下的多组红外对比图像。本文针对热尾流目标表面的红外辐射成像模型,在不同的探测条件下,通过三维坐标变换和投影映射的方法进行建模仿真,研究了探测高度、探测角度及噪声对辐射亮度模拟图像的影响。
1 海平面热尾流红外成像映射数学模型
建立仿真坐标系的模型,确定成像平面的成像单元和海平面成像区域面元的对应关系,采用投影映射方式获得热尾流海平面目标的红外探测仿真图像。以机载红外探测成像为例,建立三维成像仿真坐标系统[20],红外成像仿真坐标系包括基准坐标系O-XYZ、探测器平面坐标系OT-XTYTZT、像平面坐标系Of-XfYfZf,具体情况如图1所示。

图1 红外成像模拟仿真坐标系统成像原理
对该仿真坐标系模型进行三维坐标转换,为了方便三维坐标转换计算,假设基准坐标系位于海平面,海平面各小面元的顶点坐标采用基准坐标系确定。探测器平面坐标系原点OT也是探测器的视点,则该系统的面OT-XTYT与海平面平行。像平面坐标系原点Of,即像平面中心位置。如图1所示,P点表示探测器视线与海平面O-XY的交点,探测器天顶角为θ,φ是探测器前进方向在基准坐标系O-XY面内的投影与X轴之间的夹角,HT表示探测器垂直高度,Hf为像平面坐标系原点Of与海平面O-XY的距离。
假设已知探测系统的相关性能参数,即焦距(OT点与Of点之间的距离f)、探测器坐标OT(XT,YT,ZT),天顶角θ和φ角的大小,则根据图1坐标系统之间的对应关系,可以获得P点和Of点在基准坐标系下的空间坐标。
P点在基准坐标系下的坐标为
(1)
Of点在基准坐标系下的坐标为
2)
采用投影映射方法实现成像仿真的关键是获得像平面坐标系内各个成像单元交点在基准坐标系中所对应的坐标位置。首先通过平移变换将两个坐标系的原点合并,然后再进行旋转变换让两个坐标系的坐标轴重合[21],进而实现任意三维空间点从一个坐标系到另一个坐标系的转换过程,所以需要采用平移变换和旋转变换的方法构造出相应的坐标变换矩阵。
假设坐标系中的全部坐标点相对于X轴、Y轴、Z轴的平移量分别为tX、tY、tZ,则平移变换矩阵表示如下[21]:
(3)
采用矩阵T可实现原始坐标(X,Y,Z)同新坐标(x,y,z)的空间转换,公式如下:
(x,y,z,1)=(X,Z,Y,1)·T
(4)
进行三维空间的坐标旋转变换要求已知旋转角度和旋转轴,假设在右手系中,全部坐标点绕x轴、y轴、z轴旋转的角度分别为α、β和γ,则旋转变换矩阵R表示如下[22]:
(5)
获得矩阵T和矩阵R,则通过下式可实现三维空间中任意点的坐标转换计算,具体关系表达式如下:
(6)
图2 像平面坐标系示意图
为确定探测器与热尾流的成像映射关系,以像平面中心位置Of为原点,建立如图2所示的像平面坐标系Of-XfYfZf[23]。以θ1和θ2表示探测器水平方向和垂直方向的视场角大小,A、B、C表示成像单元,探测器视点和成像单元4个节点之间的连线与海平面的交点围成的方形区域称作探测器的有效成像区域,于是像平面到海平面的映射分解为各像元到对应的有效成像区域的映射。热尾流目标与背景海面离散为很多个三角面元,如果三角面元至少有2个点位于某成像单元的有效成像范围内,则该面元在这个成像单元内成像。根据热尾流温度分布求出各个三角面元的辐射能量,对探测器每个成像单元的有效成像区域覆盖的所有三角面元的辐射能量进行累加,即可求出每个成像单元所接收到的辐射能量。
对目标表面红外辐射进行计算,根据Planck定律计算面元i在λ1~λ2波段的半球空间辐射力。具体公式如下:
(7)
式中:Nw为热尾流的半球空间辐射力,W/m2;Nλw表示热尾流的半球空间光谱辐射力,W/(m2·μm);λ1、λ2表示辐射波波长,μm;ε表示热尾流的发射率;c1、c2依次表示第一辐射常数和第二辐射常数,c1=2πhc2≈3.74×108W·μm4/m2,c2=hc/k≈1.439×104μm·K;Tw为热尾流绝对温度,K。已知计算域中任意面元i的温度Ti,假设背景海面与热尾流区域的表面定向光谱发射率为ε(λ,θ),由Lambert定律可以计算面元i的辐射亮度[21],公式如下:
(8)
式中:Ii为面元i在零视距处的辐射亮度,W/(m2·sr);Ei(Ti)表示面元i的辐射力,W/(m2·sr);考虑到面元i对探测成像单元产生的红外辐射能量在大气中传输被衰减,采取大气透过率和零视距红外辐射能量计算出同一视线方向探测器处的辐射能量。因为目标与其所处背景的红外辐射强度分布不同,随着探测器成像单元接收到的辐射强度增大,对应的像素点灰度值增加,根据这一点,在捕捉到的红外图像中应用灰度等级表示目标区域的辐射能量分布。灰度等级映射关系由热尾流红外辐射亮度的计算结果建立,计算公式如下[24]:
GL=[r+(1-r)·(L-Lmin)/(Lmax-Lmin)]×255
(9)
式中:GL表示某一像素点的灰度值,取值范围为0~255;r表示环境泛光的红外等效值,取值范围为0~1;Lmin和Lmax表示成像域辐射亮度的下限与上限,L即为该像素点处红外辐射亮度的初始值。
热尾流红外成像仿真计算的总体流程图如图3所示。首先建立仿真坐标系的模型,然后通过三维坐标转换,建立起一定的投影映射关系,从而确定像平面坐标系中的成像单元点在基准坐标系下的空间位置,最终进行目标表面红外辐射的计算。

图3 热尾流红外成像仿真计算流程图
2 热尾流温度与辐射亮度的模拟图像及影响因素分析
取海平面计算域坐标系原点为基准坐标系原点,假设背景海面温度是293.15 K,选取平静海面作为海面模型,水下航行体航速为9 kn,冷却水以45°向下单侧排放入海,根据以上条件计算得到热尾流温度场分布图像。图4和图5分别为探测器天顶角为0°,方位角为0°和45°时模拟得到的温度场分布。

图4 垂直探测方位角0°模拟的温度图像
图5 垂直探测方位角45°模拟的温度图像
由从图4和图5中可以看出,仿真图像中显示出热尾流的整体轮廓,大致呈现“V”字型,周围区域显示的是背景海面。假设海洋背景温度为均匀分布,热尾流水面高温区分布连续且集中,只在尾流附近出现温度的随机波动,在温度模拟图像中表现为不规则的亮点。对同一热尾流区域进行红外探测时,热尾流在像平面中的形态将随着方位角的变化而发生改变,这一特点符合实际成像规律[25]。
考虑具体的探测工况,假定时间为2018年某日北京时间8:00,地点为东海某海域,红外探测器灵敏度为0.001℃,海平面发射率为0.98。假设探测天顶角和方位角均为0°,探测器视点坐标为(1 150,0,6 000),成像单元数取128×128,分别选取3 μm~5 μm和8 μm~12 μm两个红外波段进行成像仿真,最终得到呈现在探测器像平面上的热尾流红外图像如图6和图7所示。
由图6和图7可以看出,热尾流在8 μm~12 μm波段的辐射亮度远远大于3 μm~5 μm波段。由于沿纵向扩散的热尾流的几何区域,相对于探测系统的开口角度较大且大于探测器的实际视场角,因此仅有热尾流目标的一部分区域的辐射亮度呈现在模拟图像中。热尾流区域辐射亮度是最大的,该现象的原因是尾流区域中的温度高于其所处的海洋背景周围的温度。由于热尾流区域和海洋背景之间的实际温差很小,因此通过模拟获得的红外辐射亮度的总范围很小。

图6 3 μm~5 μm热尾流辐射亮度模拟图像

图7 8 μm~12 μm热尾流辐射亮度模拟图像
控制所用探测器性能、海面模型、时间和海域位置不变,研究探测高度对红外成像性质的影响。取探测天顶角0°,方位角0°,探测器垂直高度HT分别为3 km、5 km、7 km和9 km。取8 μm~12 μm波段,通过计算获得的不同探测高度条件下热尾流红外仿真图像如图8~图11所示。
设HT分别为3 km,5 km,7 km,9 km时,各组仿真图像中成像域亮度的最大值分别为Lmax,i(i=1,2,3,4),W/(m2·sr),定义无量纲数Φi为
(10)
式中:Φi代表不同探测高度下红外图像辐射亮度的相对值。根据Φi随HT的变化规律作出拟合曲线,如图12所示。

图8 高度3 km时辐射亮度模拟图像

图9 高度5 km时辐射亮度模拟图像

图10 高度7 km时辐射亮度模拟图像

图11 高度9 km时辐射亮度模拟图像
图12 热尾流辐射亮度与探测高度的关系
从图12中可以看出,当探测天顶角和方位角不变时,8 μm~12 μm波段的热尾流区域的红外辐射观测亮度随着探测高度的增加而逐渐减小。这是因为当目标辐射亮度(本征值)不变时,随着探测高度的增加,大气散射路径增大,大气介质中辐射能量的吸收和散射衰减增强,探测器接收到的辐射能量减小,所以仿真得到的目标红外辐射亮度减小。另一方面,从图8~图11可以看出,探测高度增加,对应于像平面的可见海平面增大,对应的单个成像单元的海平面面元增加,使像平面接收的每个成像单元红外辐射能量增加。由于热尾流投影面元叠加和大气衰减的双重作用,随着高度的增加,像平面处的红外辐射亮度整体变化很小。比较上述8个仿真图像,增加探测高度,像平面对应的热尾迹的实际长度增加,并且探测像平面中热尾迹区域的比例逐渐减小,其中大部分为海洋背景区域。这是因为高度增加,探测器的视角变大。
控制所用探测器性能、海面模型、时间和海域位置不变,假设探测路径长度为5 km,探测方位角30°,研究探测天顶角对红外成像性质的影响。分别取探测天顶角θ为10°、30°、50°和70°时,获取的热尾流红外图像如图13~图16所示。通过比较发现,当探测天顶角不同时,像平面中的热尾迹的形状不同,并且在像平面中占据的面积逐渐减小。同样地,设θ为10°、30°、50°、70°时,各组仿真图像中成像域亮度的最大值分别为Lmax,j(j=1,2,3,4),W/(m2·sr)。定义无量纲数Φj为
(11)

图13 天顶角10°时辐射亮度模拟图像

图14 天顶角30°时辐射亮度模拟图像
图15 天顶角50°时辐射亮度模拟图像
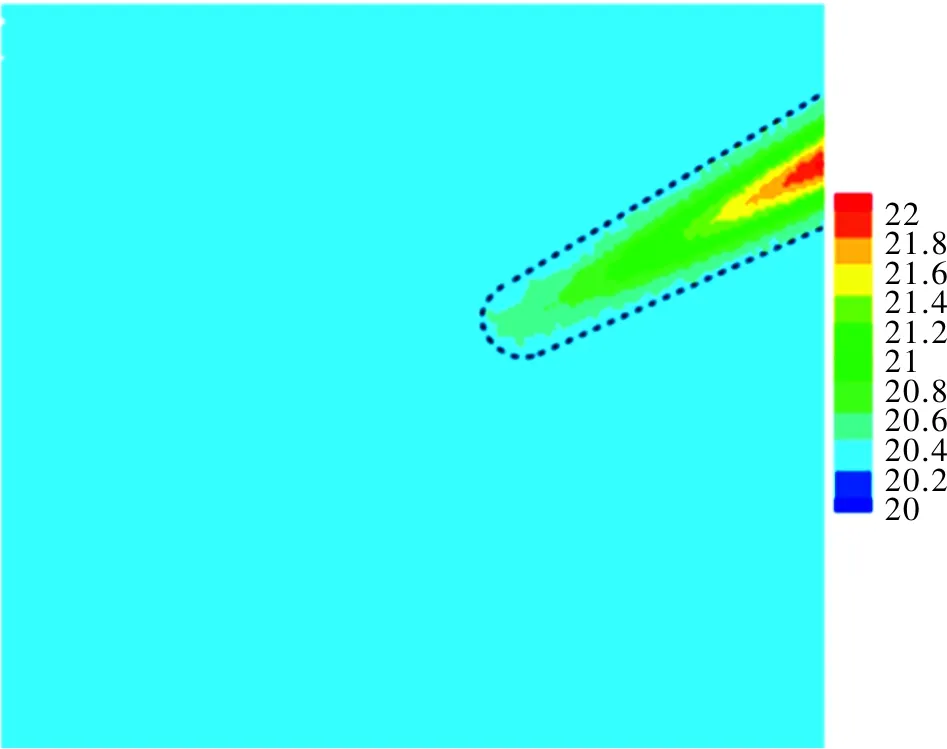
图16 天顶角70°时辐射亮度模拟图像
式中:Φj代表不同天顶角下红外图像辐射亮度的相对值。根据Φj随HT的变化规律作出拟合曲线,如图17所示。可以看出,在探测作用距离固定时,随着探测天顶角的增大,热尾流的红外辐射观测亮度逐渐减小。这是因为探测路径的长度是恒定的,随着天顶角增加,探测器的高度逐渐降低,低层大气分子和气溶胶粒子吸收和散射红外辐射能量的能力更强,大气透过率小,尾流和海洋背景的红外辐射能量在大气中强烈地衰减,因此探测器捕获的能量随着天顶角的增加而逐渐减小。

图17 热尾流辐射亮度与天顶角的关系

(12)
式中:255×Gnoise(i,j)为添加的噪声信号在该成像单元点处的灰度值。以高斯噪声为例,设Am×n,Bm×n为2个随机矩阵,其值在0~1之间均匀分布,A[i,j]=aij,B[i,j]=bij,则Gnoise(i,j)计算如下:

(13)
取std=0.2,av=0,最终得到添加噪声后,3 μm~5 μm波段红外建模仿真图像如图18和图19所示。由图18和图19可以看出,考虑噪声时红外图像带有随机亮点,热尾流和海洋背景之间的连接边缘模糊,对比度降低。这是因为尾流区域的辐射亮度大于背景海面区域,相应的成像单元的灰度值高,由噪声产生的随机亮点增加了部分成像单元的灰度值,导致尾迹区域的清晰度减小。

图18 方位角0°时辐射亮度模拟图像

图19 方位角30°时辐射亮度模拟图像
应用高斯滤波对图像进行平滑处理,可以较好地减小这种噪声的影响,从而得到信噪比较高的图像,但同时也会明显降低锐度,影响图像质量。概括地讲,高斯滤波就是对整幅图像进行加权平均的过程,每一个像素点的值,都由其本身和邻域内的其他像素值经过加权平均后得到。采用高斯滤波进行降噪处理后的辐射亮度模拟图像如图20和图21所示。

图20 方位角0°时去噪声后的仿真图像

图21 方位角30°时去噪声后的仿真图像
3 结论
本文建立了热尾流成像仿真系统计算模型,实现了对热尾流目标的红外成像建模仿真,研究了探测高度、探测天顶角和方位角以及噪声对红外成像建模仿真的影响。结果表明:
1) 相同探测条件下,热尾流在8 μm~12 μm波段的辐射能量远远大于3 μm~5 μm波段,探测系统以不同方位角进行探测时,像平面内热尾流呈现出的形态不同,整体呈现“V”字型。
2) 随着探测高度的增加,在成像面元叠加和大气衰减共同作用下热尾流区域的红外辐射观测亮度逐渐减小,并且探测像平面中热尾迹区域的比例逐渐减小。
3) 探测路径长度一定,探测天顶角对热尾流红外成像建模仿真影响作用比较明显。探测天顶角增大,红外成像建模仿真得到的热尾流红外辐射观测亮度减小,并且热尾流在像平面内所占区域逐渐减小。
4) 环境噪声和系统噪声使典型工况条件下热尾流与背景海面的对比度和清晰度下降,增加了热尾流探测和识别的难度。
