高速公路弯道路段车辆紧急避撞安全换道模型*
2019-10-10苏丽俐关志伟张荣辉宗长富李俊凯
彭 涛,苏丽俐,关志伟,张荣辉,宗长富,李俊凯
(1.天津职业技术师范大学汽车与交通学院,天津 300222; 2.中国汽车技术研究中心有限公司,天津 300222;3.中山大学,广东省智能交通系统重点实验室,广州 510275; 4.吉林大学,汽车仿真与控制国家重点实验室,长春 130025)
前言
高速换道是车辆较为常见且复杂的行驶工况,车辆换道路径,是决定车辆以安全、平稳、舒适的行驶状态超车或者躲避前方障碍物的关键所在。目前,对于车辆换道路径模型的研究主要基于统计、几何和虚拟电场方法。统计法主要基于交通流理论结合实际的交通流和车辆运行数据分析,获得车辆换道轨迹,这种方法涉及因素较多,广泛应用于驾驶行为和人机控制分析[1-3]。几何方法由于具有较好的实时性而备受关注,简明的等速偏移换道轨迹法和圆弧换道模型很好地解决了车辆变道乘员舒适性的问题,但由于存在换道轨迹路径曲率突变和不连续问题,不符合实车运动特性,实际行车难以实现[4-5]。梯形加速度换道模型是基于车辆变道时侧向加速度为线性变化且最大加速度不超过一定值,但考虑到实车变道时,车辆系统侧向运动和加速度呈现明显的非线性,所以灵活性差,制约了模型的实际应用[6-7]。采用 B样条曲线[8-9]和贝塞尔曲线[10-13]得到的换道轨迹具有连续的曲率半径,并且考虑了换道舒适性的要求,但在车辆实际换道过程中其横向最大加速度不易控制,同时产生实时性问题,存在障碍物情况下曲线控制点难以选取,制约了该方法在车辆换道避撞方面的应用。正弦函数换道轨迹计算简便、平滑性好,但由于其侧向速度完全对称,且车辆的侧向加速度和曲率极大值出现在起点和终点,不符合车辆的实际运行状态[14-15]。避撞换道方面,提出了圆形和矩形包裹的多项式路径规划碰撞检测方法,但该方法假定在换道过程中目标车辆与道路方向夹角为0,忽略了车辆横摆运动的影响,且由于纵向和侧向加速度存在实时性,在换道结束时难以达到0值,这与车辆实际状况有一定差距[16-17]。此外,国外研究人员提出了基于虚拟电场的避撞方法,通过计算车辆与障碍物质点间的最小电场势作为避撞和路径优化的依据,为避撞检测方法提供了有益参考,但该方法没有考虑车辆和障碍物的形状和高速车辆换道的运动特性,在路径优化方面仅适用于低速情况[18-19]。
综上所述,相关成果对于车辆安全换道行驶起到了较好的推动作用。但传统换道模型没有充分考虑车辆运动随外部输入的实变性和协调性,导致车辆运动状态与转向、速度和道路曲率不匹配,换道模型与实际存在一定误差。此外,传统换道模型仅考虑单一的直线路段行驶工况,对在弯道条件下的车辆换道特性研究较少。与直线道路相比,高速公路弯道路段是危险路段,在某些紧急情况下,如:前车故障、路面事故、前车驾驶员误判等,需要后车紧急避障换道。车辆在弯道处高速紧急换道,是同时包含高速稳态转向和瞬态转向的复杂工况,此时车辆处于大范围实时实变状态,极易发生翻车和引起车队连环追尾,危险性较高。因此,本文中在分析车辆换道运动特性的基础上,提出了一种弯道条件下考虑车辆运动状态实时实变的安全避撞换道模型,可为车辆驾驶安全辅助系统、智能车辆控制系统的开发提供有益参考,同时对提高道路交通通行效率提供一种借鉴。
1 弯道路段车辆避撞安全换道模型
1.1 弯道路段车辆换道侧向运动模型
弯道路段车辆避撞换道平面运动情况如图1所示。与直线路段换道相比,弯道路段车辆避撞换道行驶时,换道初始和终了为曲线过弯运动状态,存在初始转向和终了转向,整个过程可简单划分为定半径转向、正弦转向(左转)、正弦转向(右转)、定半径转向行驶4个阶段。
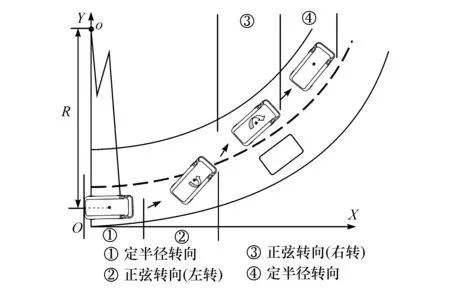
图1 车辆弯道避撞换道过程示意图
考虑到弯道路段车辆换道行驶时,前轮转角随时间实时变化,不同阶段车辆表现出不同的横摆和侧倾状态,处于实时实变状态。整车转向平面运动如图2所示。图中:XOY为地面坐标系;xoy为车辆坐标系;δf为前轮转角;v为车辆行驶速度;vx为车辆纵向速度;vy为车辆侧向速度;β为车辆质心侧偏角;φ为车辆横摆角。

图2 车辆平面运动示意图
分析车辆弯道路段换道运动,虽然整个过程中车辆为变曲率运动,但依然可分解为过弯和换道两个过程,表达为稳态定半径转向和瞬态直线段换道两个状态。因此,车辆弯道路段换道侧向运动也可认为是定半径转向运动和直线段换道运动的合成。地面坐标系XOY下,车辆侧向速度可表示为

式中:vY为地面坐标系XOY下车辆侧向速度;vY0为地面坐标系XOY下车辆稳态定半径转向侧向速度;vYc为地面坐标系XOY下车辆换道转向侧向速度。
考虑车辆高速过弯换道时,横摆角相对较小(通常小于10°),定半径转向运动时,车辆侧向速度可近似表示为

式中:vY0为地面坐标系XOY下车辆稳态定半径转向侧向速度;R0为车辆过弯转向半径;vx0和ax分别为车辆坐标系xoy下车辆纵向初速度和加速度;t为车辆行驶时间。
直线段换道运动时,引入正态分布概率分布函数,车辆侧向速度可表示为

式中:vYc为地面坐标系XOY下车辆换道转向侧向速度;d,μy和σy为侧向速度相关参数。
依据直线路段换道试验,车辆侧向速度曲线拟合结果如图3所示。
图3表明拟合结果可较好表达试验结果,利用正态分布函数形式可表达车辆换道情况下的侧向速度变化。
1.2 车辆换道纵向运动模型
通常情况下,如果前方出现障碍物和静止或较低车速行驶的车辆,后方车辆驾驶员一般会采取紧急制动、变换车道等方式避免碰撞。但由于受驾驶员反应时间、制动效能迟滞等影响,导致车辆制动距离增大,尤其是在高速行驶时,单纯依靠制动难以保证安全避撞,而通过紧急换道与速度控制相结合的方式,可更迅速地使后车横向偏离初始车道,避免与前方障碍物或车辆碰撞。
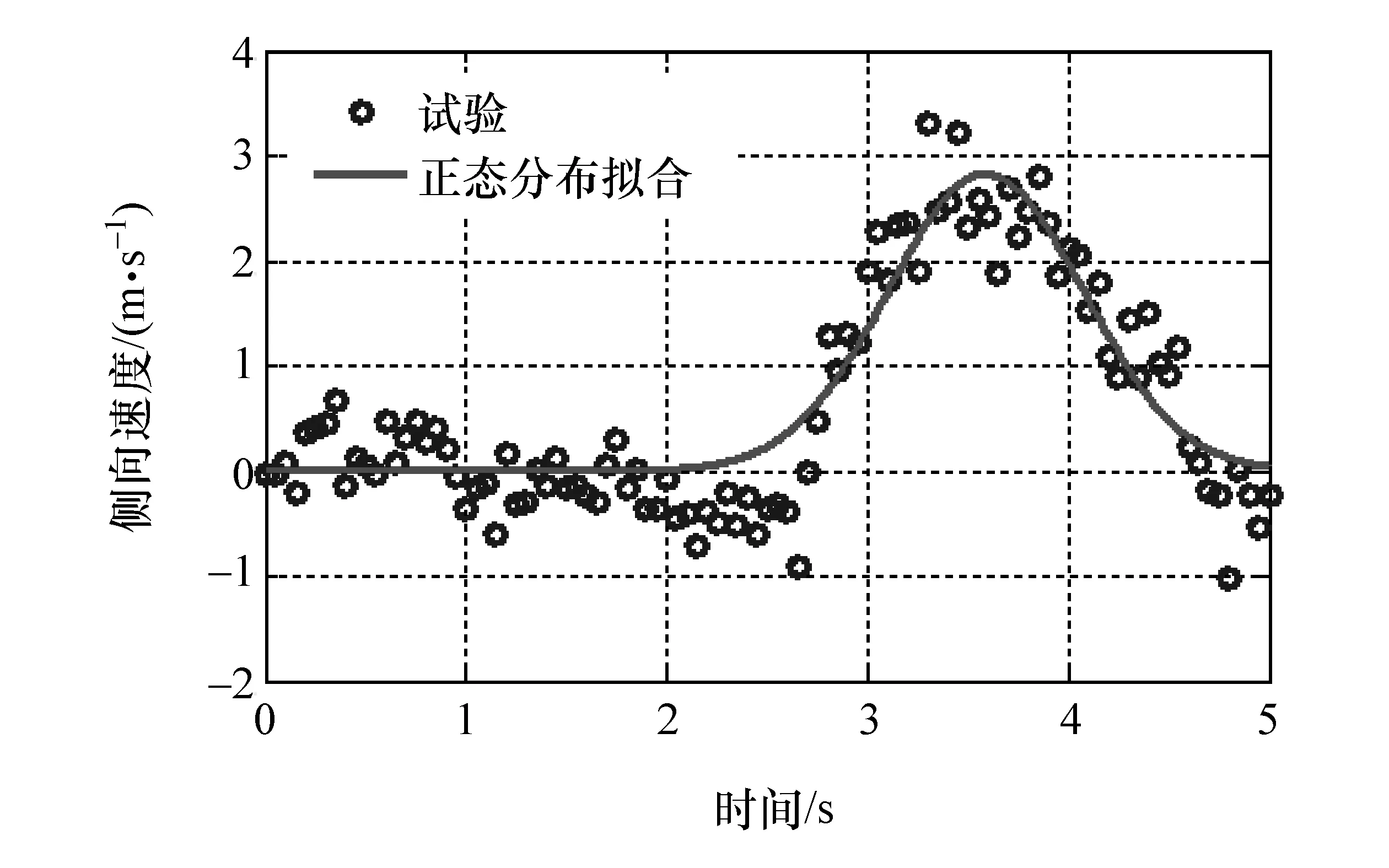
图3 直线路段换道侧向速度正态分布函数拟合情况
制动转向变道是驾驶员同时操纵制动和转向的变道方式,车辆纵向速度vX和纵向位移SX可近似表示为
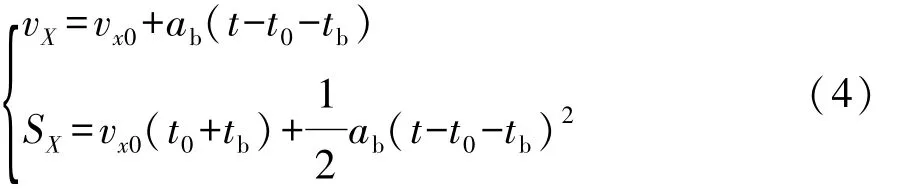
式中:t0为驾驶员反应时间;tb为驾驶员踩上制动踏板和克服制动器间隙时间;ab为车辆纵向制动减速度。
1.3 车辆避撞换道模型
为确保车辆不与前方障碍物或前车发生碰撞,车辆换道安全避撞的临界位置关系如图4所示。

图4 车辆避撞安全换道临界位置关系
如图4所示,弯道处车辆在tp时刻定半径转向横摆角为φ0(tp),为更好地分析车辆换道侧向位置,将tp时刻的地面坐标系OXY逆时针旋转φ0(tp)形成O′X′Y′,此时换道车辆纵轴与 O′X′轴形成夹角φc(tp)即为换道横摆角。可见,车辆通过换道方式能够安全避撞的首要条件是:换道车辆在运动到tp时刻,右后部P点与前方障碍物或车辆左后部不发生接触。根据车辆位置几何关系和运动情况,上述条件可表示为
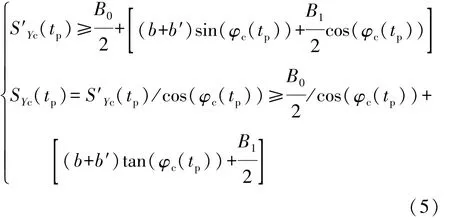
式中:SYc(tp)和 S′Yc(tp)分别为地面坐标系 OXY和O′X′Y′下 tp时刻车辆换道侧向位移;B0为前方障碍物或车辆宽度;B1为换道车辆宽度;b为换道车辆质心位置至后轴的纵向距离;b′为换道车辆后悬长度。
2 车辆弯道避撞换道安全性分析
根据现行交通行业标准JTG B01—2014《公路工程技术标准》规定:设计时速120 km/h的高速公路车道宽度为3.75 m。车辆为躲避前方障碍物或车辆变换至临近车道,其行驶安全性表现在:首先,车辆能够避开前方障碍物或车辆,防止碰撞;其次,车辆能够及时回正,侧向位移应满足不超出临近车道的要求;此外,车辆应保证行驶稳定性,侧向加速度应小于极限值,避免发生侧滑或侧翻。
设定车辆在正弦转向周期和运动延迟时间段内完成过弯换道整个过程的概率为P,结合车辆邻近变道避撞的实际情况,考虑驾驶员反应时间和车辆运动响应延迟时间,式(3)侧向速度公式中相关参数为
式中:f为驾驶员正弦转向频率,紧急转向时一般为0.3~0.5 Hz;td为车辆侧向速度延迟时间,该值与车辆动力学特性相关;λ为概率系数,设概率P为98.76%~99.74%,则λ取值为5~6。
当 t=μy时,侧向速度达到 vYc(t)max,若换道车辆满足避撞的临界位置要求,这种情况能保证车辆侧向和纵向位移最小,车辆紧急避撞的临界条件为
由式(7)可见,利用正态分布函数表达的车辆过弯换道侧向加速度最大值aY(t)max与车辆初始纵向速度vx0、纵向加速度ax、弯道半径R0、驾驶员转向频率f、概率系数λ和车辆侧向速度延迟时间td有关;换道横摆角最大值φc(t)max还与车辆纵向速度相关,该值决定了换道车辆能够避撞的最小侧向位移SYc(tp)min、时间点 tp和最小安全距离 Sm。
制动变道情况下,过弯换道车辆与前方障碍物或车辆的最小安全距离Sm可近似表达为
式中:v′x0为前方障碍物或车辆初始纵向速度;a0为前方障碍物或车辆纵向减速度;L为换道车辆长度。
3 车辆弯道安全避撞换道模型验证
基于经典的线性2自由度汽车动力学仿真,验证车辆弯道避撞换道模型的可靠性[20]。2自由度汽车运动微分方程为

相关参数含义和数值见表1。
某乘用车车速为30 m/s,高速公路弯道半径为650 m,路面为干燥沥青路面(附着系数为0.8),为躲避前方宽度为2 m的静止障碍物,变换至邻近车道(车道宽度3.75 m)。分别利用2自由度汽车动力学模型和本文中提出的车辆弯道避撞安全换道模型对车辆安全换道距离和运动情况进行计算分析。
表1 汽车相关参数
考虑驾驶员的反应时间为0.5 s,车辆不同转向频率条件下紧急制动变换到邻近车道。车辆以最大减速度8 m/s2紧急制动,制动延迟时间为0.5 s,设定0.3,0.4和0.5 Hz转向条件下车辆侧向运动延迟时间分别为0.05,0.1和0.15 s,概率系数λ取值为5。利用式(6)得到的侧向速度相关参数见表2。

表2 紧急制动情况弯道换道相关参数
分别利用2自由度汽车动力学仿真和弯道避撞安全换道模型获得车辆运动参数,结果见表3。
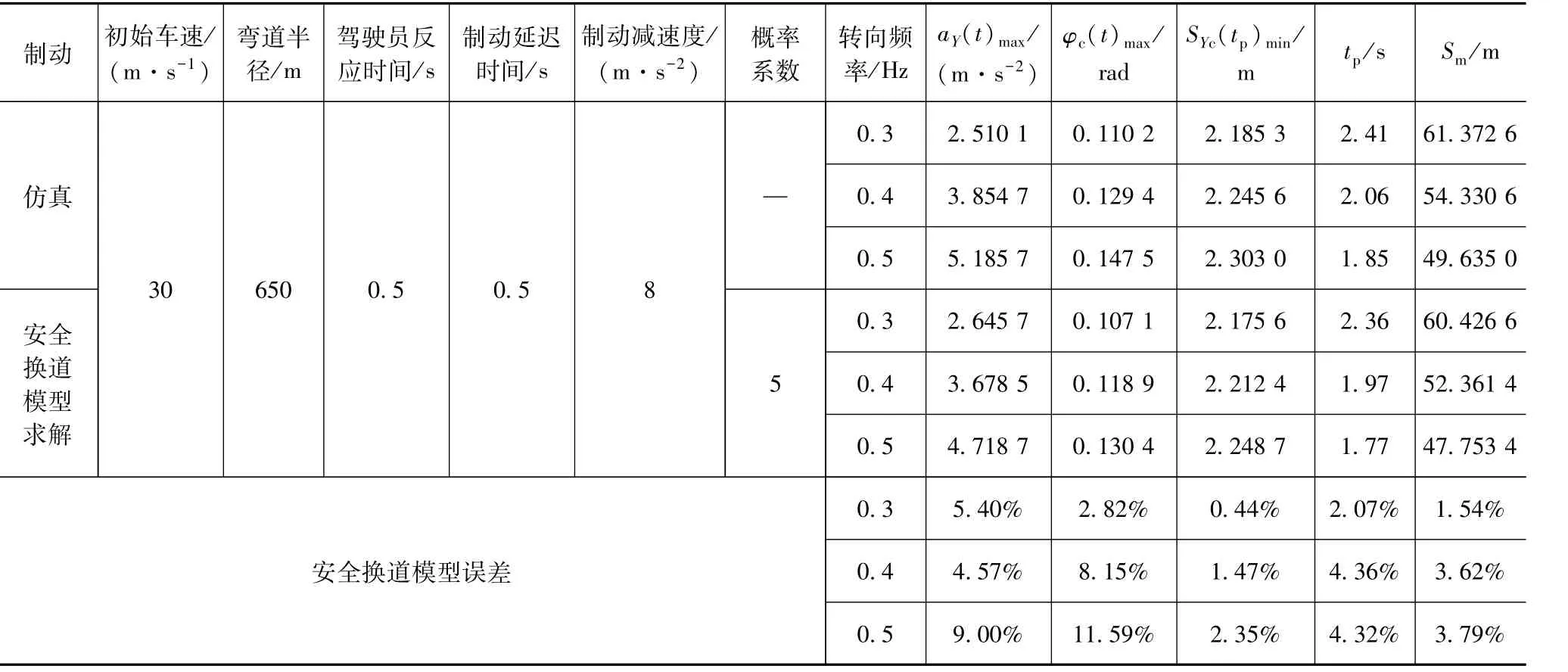
表3 紧急制动情况车辆弯道换道仿真与模型求解参数对比
由表可见:趋势方面,随着转向频率的增加,车辆侧向加速度和横摆角最大值越大,车辆紧急避撞的最小侧向位移越大,时间点tp越小,换道车辆与前方障碍物(车辆)的最小安全距离越小,当转向频率为0.5 Hz时,车辆换道过程中最大侧向加速度达到约5.2 m/s2,在干燥沥青路面上处于稳定状态;数值方面,换道模型求解获得的车辆最大侧向速度和换道横摆角速度最大值误差均小于12%,而紧急避撞的最小侧向位移和最小安全距离误差在5%以内,表明仿真与模型计算有较好的一致性。
转向频率分别为0.3,0.4和0.5 Hz条件下,车辆紧急制动换道仿真与模型求解得到的侧向运动情况如图5所示。
由图可见,弯道紧急制动避撞换道仿真与模型求解侧向速度和车辆行驶位移变化趋势一致性较好。仿真和弯道换道模型求解得到的侧向速度和行驶位移均方根误差(RMSE)见表4。
由表4可见,仿真与模型求解车辆侧向速度和侧向位移均方根误差小于0.2,表明两者在数值方面一致性较好。基于先前在趋势和数值两方面的对比结果,可见该模型能够较好地表达车辆弯道紧急制动避撞换道的运动状态。
4 车辆弯道安全避撞换道模型比较
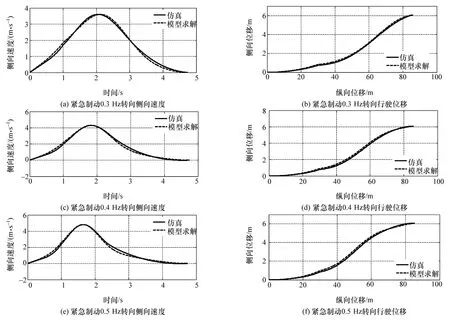
图5 紧急制动避撞换道仿真与模型求解侧向运动曲线对比

表4 紧急制动弯道换道侧向速度和位移均方根误差
某乘用车车速为30 m/s,高速公路弯道半径为650 m,路面为干燥沥青路面(附着系数为0.8),为躲避前方宽度为2 m的静止障碍物,变换至邻近车道(车道宽度3.75 m)。分别利用2自由度汽车动力学模型[26]、车辆弯道避撞安全换道模型和多项式模型对车辆安全换道情况进行计算分析。
多项式模型,即在地面坐标系下,将车辆纵向和侧向位移表达为5次多项式的形式:

定义式(11)时间参数矩阵。式中:tin为换道初始时刻;tfin为换道结束时刻。通过求解式(10)中的系数矩阵 A=[a5a4a3a2a1a0]和 B=[b5b4b3b2b1b0],获得换道轨迹。系数矩阵A和B满足式(12)边界条件。
根据该边界条件即可求得系数矩阵,获得换道轨迹。
已知某乘用车车速为30 m/s,高速公路弯道半径为650 m,路面为干燥沥青路面(附着系数为0.8),为躲避前方宽度为2 m的静止障碍物,以0.4 Hz转向频率变换至邻近车道(车道宽度3.75 m),考虑驾驶员的反应时间0.5 s,紧急制动(制动延迟时间0.5 s,制动减速度8 m/s2)情况下,得到系数矩阵:
A=[0.0020,0.5786,-3.0541,0,30,0]
B=[0.1894,-1.2309,2.1336,0,0,0]
各模型求解结果对比见表5,车辆侧向速度和行驶轨迹情况如图6所示。
由表5可见,车辆动力学模型仿真与本文中提出的安全换道模型结果一致性较好,误差相比多项式模型较小,最小安全距离参数误差小于5%。由图6可见,安全换道模型在侧向运动和行驶轨迹方面与仿真结果相近,能较准确反映车辆紧急制动过弯、换道运动的实际情况,采用多项式模型在侧向运动峰值、避撞时间点、最小安全距离和行驶轨迹方面与仿真结果有较大偏差,表明本文中提出的弯道紧急避撞安全换道模型具有较高的可靠性。
通过对比分析两种数值模型在制动情况下的求解结果,弯道紧急避撞安全换道模型特点为:首先,实现了对换道过程控制,多项式模型考虑了换道初始时刻和完成时刻车辆的运动特性,但忽略了在运动过程中的速度、加速度等参数的约束;其次,充分考虑了车辆侧向运动延迟对于运动和轨迹拟合的影响,减小了车辆过弯换道运动参数和避撞最小安全距离的计算误差;此外,与多项式假定车辆在换道过程中呈平动状态不同,考虑了车辆横摆对侧向运动和避撞位置的影响,反映了车辆的实际状态。
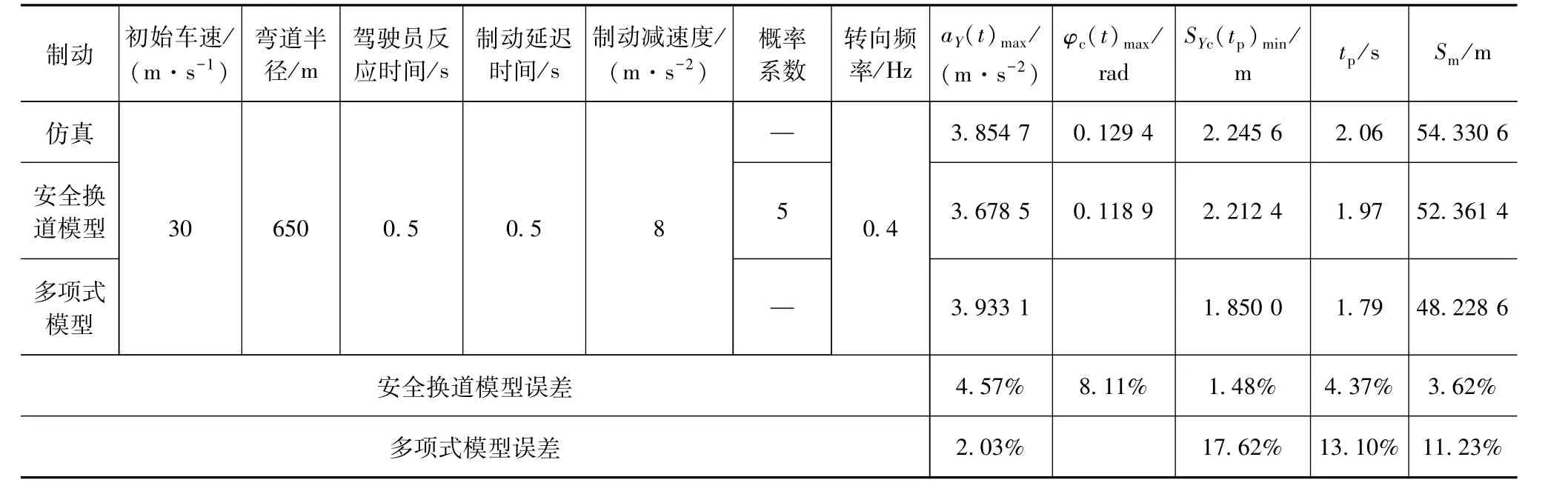
表5 紧急制动情况车辆弯道避撞换道仿真与模型求解参数对比
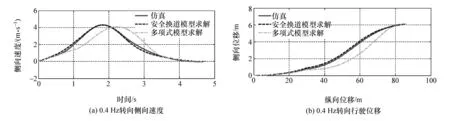
图6 制动情况车辆弯道避撞换道仿真与模型求解侧向运动曲线对比
5 结论
车辆在弯道路段换道可分解为定半径转向和直线段换道两种耦合运动,通过引入正态分布函数表达车辆换道侧向速度参数,构建的车辆紧急避撞安全换道模型能够充分考虑驾驶员反应和制动延迟、转向频率、车速、车辆侧向运动延迟、车道宽度、道路曲率、道路附着等人-车-路关键因素;结合车辆弯道避撞几何位置关系,车辆避撞安全换道的侧向位置和加速度约束条件,获得了车辆最小避撞安全距离模型,其中换道横摆角最大值决定了换道车辆能够避撞的最小侧向位移、时间点和最小安全距离。依据经典2自由度车辆动力学模型和传统多项式换道路径对比分析结果,安全换道模型可实现过程约束和控制,求解结果可靠性较高。本文中实验仅选用了2自由度车辆动力学模型仿真进行验证,验证方案还有待于复杂化和真实化,复杂因素影响下的车辆安全换道模型还有待于进一步研究。
