冲压模具运动虚拟仿真实验
2019-10-08张希磊章志兵
李 阳,张希磊,黎 慰,章志兵
冲压模具运动虚拟仿真实验
李 阳,张希磊,黎 慰,章志兵
(华中科技大学 材料成形与模具技术国家重点实验室,湖北 武汉 430074)
基于虚拟运动仿真原理,建立了冲压模具运动仿真的实验步骤和评价方法。利用多工位汽车覆盖件冲压模具生产线运动仿真实例,进行冲压模具运动过程的研究。冲压模具运动虚拟仿真实验再现冲压模具运动过程。通过分析冲压模具的干涉检查结果,对冲压模具设计存在的问题提出修改意见,提高冲压模具设计质量,保证冲压模具各个部件、生产线送料机构在工作时的通过性和运动无干涉。
冲压模具;运动虚拟仿真;实验教学
目前,虚拟仿真实验已经成为高校实验教学研究的重要内容[1-2]。虚拟仿真实验可以完成许多真实实验难以完成的实验项目,可以设置极端实验条件,是信息化教育前提下人才培养的重要方法之一[3-5]。
冲压模具自动生产线实现了换模、送料等生产过程的自动化,在降低的生产线工作人员数量的前提下,提高了生产的安全性、效率和制件的质量[6-8]。但是自动化冲压生产线对设备要求高、占地面积大,而且在实验过程中容易发生干涉等风险。本文设计了冲压模具运动虚拟仿真实验,实现了大型复杂零件的自动冲压生产实验,提升了冲压模具教学效果。
1 实验目的与原理
设计冲压模具运动仿真实验的目的是使学生了解冲压模具运动虚拟仿真实验原理,掌握仿真实验的过程和冲压模具中关键运动部件(如上下模、夹钳、斜楔等)的运动规律,并且根据实验结果分析冲压模具运动过程中干涉位置,结合冲压模具设计知识,提出避免干涉的解决方案。
自动冲压生产线相对于手工生产线,提高了对模具的要求。设计人员在保证模具结构设计质量的同时,还需要保证模具部件与冲压设备之间能够完美契合,实现连续、高效的冲压和送料动作。在整个循环动作中,要保证各个运动部件的通过性和运动无干涉[8-10]。通过对冲压模具运动的虚拟仿真,可以检查模具设计是否合理,降低后期检查模具运动合理性的成本。
冲压模具运动仿真实验是动态模拟实验。该实验基于现有的计算机科学技术,抽象出现有的冲压模具运动仿真模型,并且根据模拟实验的结果对冲压模具的运动情况进行分析,判断冲压模具中各种零件的设计是否合理,部件在运动过程中是否会产生干涉等问题,并对冲压模具设计中的问题提出改进方案。
2 冲压模具运动仿真实验设计
以多工位汽车覆盖件冲压模具生产线为实例进行运动虚拟仿真实验设计。多工位汽车覆盖件冲压模具生产线一般包括拉延、修边、侧修边、侧冲孔、整形等不同生产工序,覆盖了冲压模具中上下模、斜楔、滑块和夹钳等常见的关键运动部件的运动过程,比较适于实验教学。在实验中,学生对覆盖件模具中的关键运动部件做运动曲线和运动情况的详细分析,通过对比运动理论分析结果和仿真结果,查看运动仿真实验的准确性。
2.1 仿真软件选择
进行冲压模具运动仿真实验,首先要选择一套使用方便、功能齐全、适合实验教学的仿真软件。目前,常用的运动仿真软件分为两种:一是通用CAD设计软件中提供的运动仿真和干涉检查模块,例如SolidWorks中的Animation插件、Pro/Engineer 中的DADS/Pro模块以及SoildEdge中的Simple Motion、CATIA中的DMU模块、UG中的Motion Simulation等;二是专业的运动仿真软件,例如日本UEL公司开发的三维CAD/CAE软件SolidAidMeister等。这两种仿真软件各有所长。
通用CAD中的干涉检查模块的数模文件在同一平台下进行结构设计和仿真检查,避免了格式转换中数模信息丢失或是效率降低,并且设计人员可以在同一个平台下快速进行模具设计修改,提高检验与修改设计的效率[11-13];其缺点是内嵌的仿真模块大多是通用性模块,对于运动部件多、运动方式复杂的运动仿真,操作繁琐、设置复杂。
使用专业的运动仿真软件进行运动仿真和干涉检查,仿真过程专业、便捷,但是需要对数模进行反复的格式转换,不但效率较低,还有可能丢失相关的数模信息。
本实验采用的是实验室开发的基于通用CAD软件CATIA的快速运动仿真系统(RP-DMU),该系统既可以快速进行冲压模具中运动部件和运动关系定义,又避免了不同设计平台之间数模格式转换造成的数模信息丢失和效率低的问题,可以有效提高运动仿真和模具设计修改效率。
2.2 快速运动仿真系统(RP-DMU)系统开发
开发的冲压模具运动虚拟仿真实验系统基于CATIA平台,基于CAA的开发技术完成运动轨迹定义、运动仿真定义、干涉检查定义和干涉结果分析等4个功能模块的开发。
系统采用3层系统结构。
(1)物理层:系统基于CATIA软件平台开发,通过使用CAA 开发工具,调用CAA API、Excel API、 Windows API进行开发,分别完成与CATIA相关的功能、Excel信息读取和文件操作等功能。
(2)数据层:对功能层中输入和处理后的各种数据进行存储,并随时提供读写和更新。数据层处理的数据包括:①基本运动曲线(压机运动曲线和三维夹钳的运动曲线),用于解析计算其他部件的运动规律;②部件定义信息(设计人员根据需求定义仿真时,完整约束部件运动方式的各种信息);③仿真驱动数据(根据设计人员的定义数据,结合基本的运动曲线数据,对各个仿真部件进行运动轨迹的计算、解析出来的数据);④干涉检查报告。
(3)功能层:系统对多工位模具运动仿真和干涉检查包含4个功能模块。运动仿真部分包括运动部件定义、运动轨迹定义以及运动仿真;干涉检查与分析部分包括干涉检查设置以及干涉检查结果分析。
2.3 冲压模具运动虚拟仿真实验技术路线
用快速运动仿真系统(RP-DMU)实现冲压模具运动仿真实验的主要过程分为3个阶段。
(1)准备虚拟仿真实验的冲压模具模型。要求模具中每个单独运动的部件必须放在单独的零件节点下,运动方式相同的部件必须放在同一个装配节点下,无用部件必须删除,模具部件必须是实体。
(2)定义模型并进行运动仿真。主要是两方面的工作:一是针对不同的工序定义冲压模具中关键运动部件如,上/下模、压料装置、顶出提升机构、斜楔、工序件等;二是根据冲压模具运动的相关要求,设置合适的行程参数和参考的运动部件,保证运动仿真的结果与实际冲压生产线中冲压模具的运动结果相吻合。
(3)输出报告。根据虚拟运动仿真实验的结果输出报告,可以动态查看每个运动时刻是否存在干涉,并针对发生干涉的时刻,检查模具中干涉发生的部件和位置,提出修改意见。
3 冲压模具运动虚拟仿真实验
3.1 虚拟仿真模型运动分析
要正确进行汽车覆盖件冲压模具运动虚拟仿真实验,需要对冲压模具各部分的运动有准确的认知。冲压模具的运动的主要动力源是压机,模具中的运动部件主要包括:上下模、滑块、斜楔和工序件等。各部件的运动方式如下:
(1)模具中下模一般是固定件,是其他运动部件的参考部件;
(2)上模与压机直接装配在一起,运动曲线就是压机运动曲线;
(3)滑块主要包括压料圈、上下压料芯以及顶出提升装置,这些部件的运动要增加一定的运动参考(如上模),在滑块与其他部件接触之前,其运动方式与参考运动部件相同,接触之后发生相对运动;
(4)工序件主要在送料和冲压方向上进行运动,多工位生产线中还有用于自动送料的三维夹钳装置,其运动方式分解为送料、夹持和提升3个方向上的运动。
3.2 虚拟仿真实验结果分析
以多工位汽车覆盖件模具自动冲压生产线为例,利用快速运动仿真系统(RP-DMU),快速进行冲压模具运动仿真,同时生成相关的运动情况和干涉检查报告。
利用RP-DMU系统实现多工位模具的运动仿真,检验其中关键运动部件三维夹钳、上下滑块以及斜楔的运动规律,验证仿真运动的真实有效性。如图1所示,RP-DMU系统自动解析出的各运动部件的驱动曲线,与分析结果一致。

图1 关键部件的运动曲线
滑块运动以上压料心为例,分析上压料芯的运动。以模具下死点为基准点,以上模为参考部件,上压料芯的运动曲线如图2所示。在上压料芯与下模部件碰撞之前,它与上模是相对静止的,此时的运动曲线与压机曲线相同,当到达接触点位置时,产生相对运动。上模继续在压机的作用下向下运动,而上压料芯与工件相碰,处于压料状态,此时上模与上压料芯之间的气缸或弹簧逐渐压缩,直至上模到达下死点。在这一过程中,上压料芯的运动曲线为水平直线。随着上模开始上行,上压料芯的运动过程正好与下行过程对称,如图所示即可得到上压料芯的运动曲线。但是,上述曲线是以上模为参照的曲线,上压料芯的上死点位置与上模的上死点位置正好相差一个行程,上压料芯运动到的接触点位置时,应正好是其下死点位置。因此,真实上压料芯的运动曲线还需要进行修正,将上述的运动曲线沿轴方向向下平移一个行程的距离即可得到(见图2)。
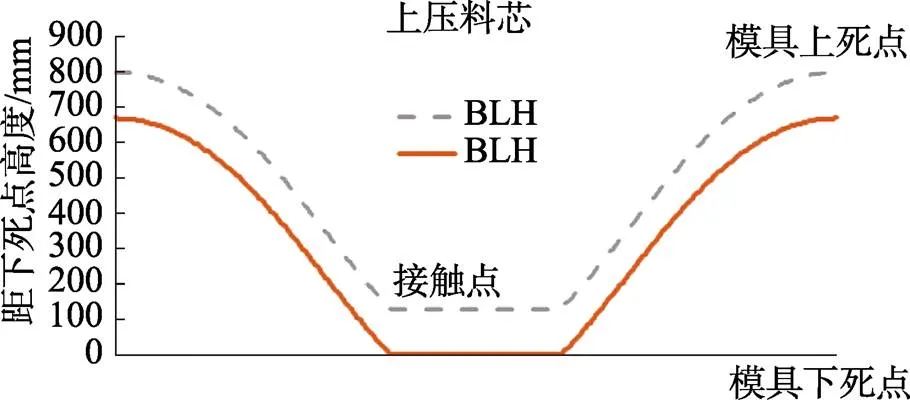
图2 上压料芯运动曲线
下滑块运动以顶出提升装置为例。考察顶出提升装置的运动,以模具下死点为基准,以下模为参考部件。在上模或其附属部件对顶出提升装置施加压力前,它处于静止状态。由于此时的气缸或弹簧处于完全舒展状态,此时部件处在最大行程处。从接触点开始,在压机的作用下,顶出提升装置开始受到压力,气缸或弹簧逐渐收缩,一直到上模运动到下死点位置。这一阶段的顶出提升装置与上模一同向下运动,其运动曲线与压机曲线相同。在上模回程向上运动的过程中,顶出提升装置与前一阶段的运动正好对称,其完整运动过程如图3所示。
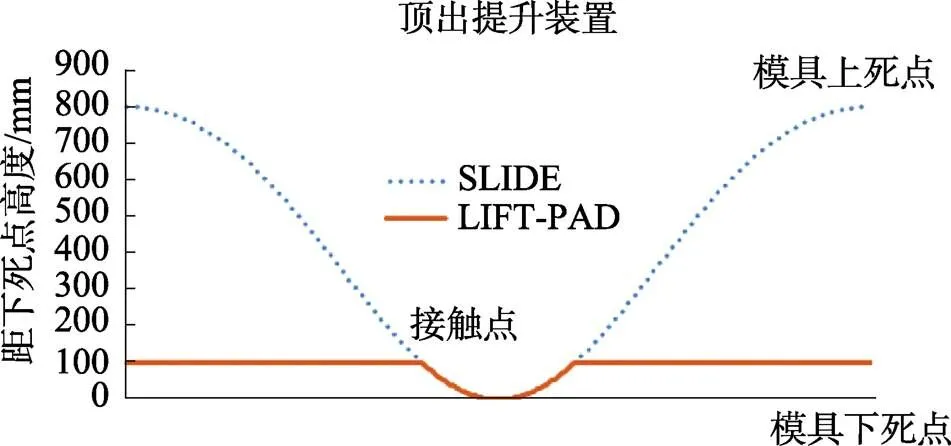
图3 顶出装置运动曲线
在一个冲压周期内,工序件主要在送料和冲压方向进行运动。工序件在三维夹钳进给送料时,与三维夹钳一起运动,在夹钳松开回退到下一个工序的阶段,工序件此时已经放置在模具上,工序件与顶出提升装置或压边圈一起在冲压方向运动。根据分析,工序件同样可分解为送料和冲压两个方向上的运动。其中送料方向的运动在三维夹钳的FEED送料曲线上处理得到,冲压方向的运动则由三维夹钳LIFT提升曲线和模具下滑块曲线处理得到,若当前工序没有下滑块部件,则直接为LIFT曲线。如图4所示,LIFT为三维夹钳提升方向的运动曲线,LIFT-PAD为当前工序中顶出提升装置的运动曲线,可得到工序件冲压方向的运动曲线。
将上下模运动曲线、压料芯、顶出装置、三维夹钳、工序件等不同部件的运动规律和运动曲线合起来即是图5所示的运动曲线。本文不涉及有限元力学分析,在无更多运动参数的输入条件下,以不发生干涉为前提,实现近似真实的仿真运动。
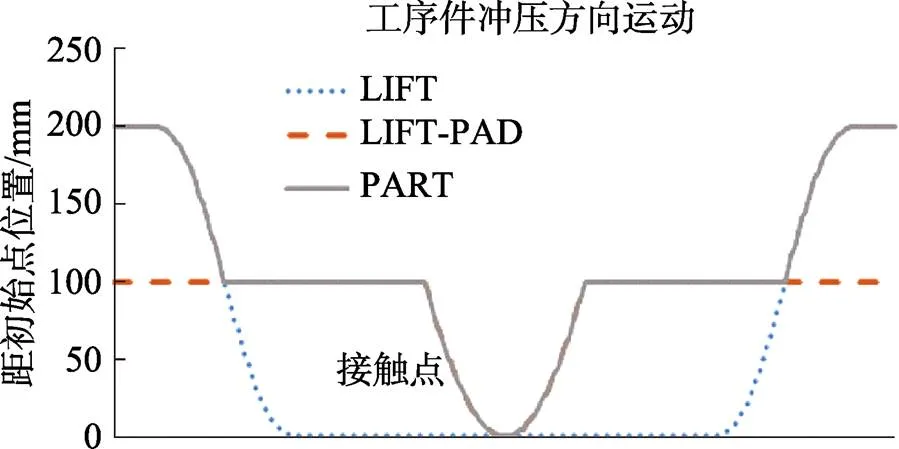
图4 工序件在冲压方向运动曲线
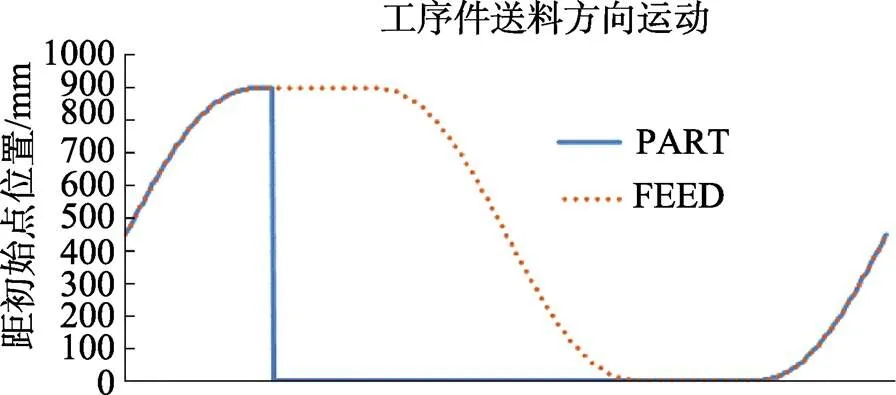
图5 工序件在送料方向的运动曲线
在仿真过程中,利用传感器对部件产生干涉的时间和数目进行记录,即可输出动态干涉记录结果。对照动态干涉结果记录表和仿真时间轴,可以查看发生干涉的具体时刻和部件的具体情况(见表1)。

表1 干涉发生的时间和数量
在仿真过程中,可以根据发生干涉的时间,动态查看冲压模具的干涉情况(图6)。在运动仿真过程中设置需要检查的干涉的类型,可以直接定位到发生干涉的时刻,通过三维视图和列表检查发生干涉的部件、干涉程度。图6显示模具三维夹钳和模具上模发生干涉,干涉类型为碰撞,干涉深度为60.21 mm。

图6 详细干涉情况
根据设计需要,可以通过CATIA提供的相关接口,输出静态干涉检查报告,作为设计人员修改冲压模具设计的参考使用。
3.3 冲压模具运动虚拟仿真实验的教学效果
通过多工位汽车覆盖件模具运动的虚拟仿真实验,将难以随时呈现的模具运动过程真实地再现出来。学生可以通过多次不同的模具虚拟运动仿真过程,观察到冲压模具的运动过程和发生干涉的位置,直观地理解和掌握冲压模具的运动规律以及可能存在的设计问题,感受模具运动过程中干涉发生位置和干涉程度。教师引导学生针对实验中冲压模具运动中存在的干涉情况,分析发生干涉的原因,提出合理的模具设计修改方案,最终提高学生的实验操作能力和分析问题的能力,得到较好的实验教学效果。
4 结语
通过建立开放的冲压模具运动仿真实验平台,学生可以通过不同的冲压模具结构的运动过程,自主对冲压模具设计问题提出合理化的修改意见,培养学生自主分析问题和独立的创新思维,显著提高学生解决工程问题的综合能力。
[1] 纪金豹,李炎峰,李振宝,等.结构虚拟实验教学系统的开发与应用[J].实验室研究与探索,2013, 32(9): 98–100.
[2] 冯峰,孙聪,曲先强.船海虚拟仿真实验教学中心的建设与发展[J].实验技术与管理,2014, 31(1): 11–14.
[3] 刘亚丰,吴元喜,苏莉,等.信息化背景下虚拟仿真实验教学中心建设规划与实践[J].高校生物学教学研究(电子版),2015, 5(3): 39–43.
[4] 刘亚丰,余龙江.虚拟仿真实验教学中心建设理念及发展模式探索[J].实验技术与管理,2016, 33(4): 108–114.
[5] 杨光祥,梁华,曹晓莉,等.过程控制系统仿真与实践结合的实验教学设计[J].实验技术与管理,2013, 30(1): 91–93, 100.
[6] 陈景松,王平,蔡军.现代轿车制造业中的压力机[J].锻压装备与制造技术,2003(1): 29–31.
[7] 闵鹏,李广平,闵建成.多工位压力机发展研[J].锻压装备与制造技术,2013(3): 9–14.
[8] 肖遥,杜亭,章志兵,等.基于NX平台的自动冲压线汽车模具运动仿真系统[J].塑性工程学报,2014(1): 38–43.
[9] 庄宇昀,徐辉.冲压线的发展[J].一重技术,2005(4): 20–22.
[10] 陈玉全,汪欢,温国安,等.汽车零件侧冲模具参数化建模与仿真[J].装备制造技术,2007(7): 4–6.
[11] 龙玲,殷国富,胡新如.多工位级进模具运动仿真技术研究与应用[J].机械设计与制造,2012(2): 239–241.
[12] 崔令江.汽车覆盖件冲压成形技术[M].北京:机械工业出版社,2003.
[13] 范成建,熊光明,周明飞.虚拟样机软件MSC. ADAMS应用与提高[M].北京:机械工业出版社,2006.
Virtual simulation experiment of stamping die movement
LI Yang, ZHANG Xilei, LI Wei, ZHANG Zhibing
(State Key Laboratory of Material Forming and Die Technology, Huazhong University of Science and Technology, Wuhan 430074, China)
Based on the principle of virtual motion simulation, the experimental steps and evaluation methods of stamping die motion simulation are established. The motion simulation of stamping die production line for multi-station automobile panel is used to study the motion process of stamping die, and the result of the virtual simulation experiment of stamping die motion plays back the process of stamping die motion. By analyzing the results of interference inspection of stamping dies, some suggestions are put forward to solve the problems existing in the design of stamping dies, so as to improve the design quality of stamping dies and ensure that the passing and movement of the parts of stamping dies and the feeding mechanism of production lines are not interfered in the work.
stamping die; motion virtualsimulation; experimental teaching
TP391.9;TG385
A
1002-4956(2019)07-0116-04
10.16791/j.cnki.sjg.2019.07.028
2018-12-27
湖北省教学改革项目(140114);华中科技大学教学改革项目;华中科技大学实验室技术改造项目
李阳(1979—),男,湖北武汉,博士,高级工程师,主要研究方向为材料成型及工艺优化.E-mail: liyang@hust.edu.cn
