双向Buck/Boost变换器在自行系统上的应用研究
2019-09-23刘文逸范天峰张艳利付小强
刘文逸,范天峰,张艳利,付小强
(西北机电工程研究所,陕西 咸阳 712099)
随着自行高炮在现代战场中作战对象和作战任务的变化,各国越来越重视发展自行高炮的高机动行进间伴随防空作战能力。目前我国大多数自行高炮初级电源是由底盘发动机驱动发电机提供,自行高炮行进间受路况影响进行减速、爬坡或者换挡等操作时,底盘发动机转速下降,造成发电机输出功率下降,从而导致自行高炮电源系统因功率不足无法正常工作,严重影响自行高炮工作的稳定性和可靠性。
针对自行高炮电源系统因底盘发动机转速下降导致输出功率不足的问题,笔者提出采用一种基于双向Buck/Boost变换器的双向功率补偿系统,其中双向Buck/Boost变换器控制超级电容和直流母线之间能量的流向和大小,是自行高炮功率补偿系统的核心部件。因此笔者设计了一种适合于该功率补偿系统的双向Buck /Boost变换器,确定了自行高炮在不同工作状态下双向Buck /Boost变换器对应的工作模式[1]的控制目标,分析了其在自行高炮行进间作战的应用需求,建立了小信号动态模型,并对相应控制器参数的设计方法进行了详细的分析。结合工程应用背景,研制了实验样机,并进行了两种工作模式之间切换试验和充放电试验,验证了理论分析和工程设计的正确性。
1 拓扑与工作原理
1.1 变换器拓扑分析
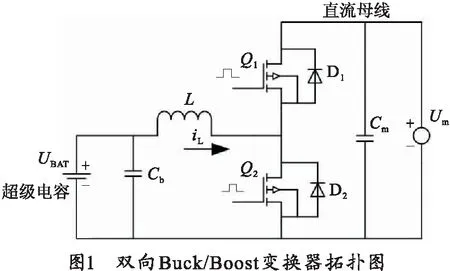
图1为自行高炮电源系统双向Buck/Boost变换器拓扑图[2],其中超级电容的端电压为UBAT,直流母线的端电压为Um,双向Buck/Boost变换器工作模式通过功率补偿系统的控制管理策略控制。当双向Buck/Boost变换器工作在Boost模式时,因发动机转速下降而导致直流母线上下降的那部分功率通过超级电容放电补偿,但由于超级电容两端的电压随放电时间下降,同时受负载功率需求影响,负载因自行高炮动作而不断波动,因此需要对超级电容输出电压采取稳定控制;当双向Buck/Boost变换器处于Buck模式时,变换器控制直流母线向超级电容充电,采用先恒流后恒压的充电方式。
1.2 工作原理分析
加装功率补偿系统的自行高炮行进间战斗时可分为两种工作状态:非正常行驶(换挡、爬坡、减速或刹车)和正常行驶。当自行高炮非正常行驶时,行进间进行换挡、爬坡、减速和刹车操作时,双向Buck/Boost变换器工作在Boost工作模式,此种模式下, 底盘发动机转速下降,导致电源系统发电机输出功率下降,低压侧超级电容的能量由双向变换器升压向直流母线补偿能量,发电机和超级电容共同提供自行高炮行进间射击时所需要的瞬时大功率,这样避免了因底盘发电机输出功率不足从而影响电源系统正常工作[2-3]。当自行高炮正常行驶时,双向Buck/Boost变换器工作在Buck工作模式,此时底盘发动机运转在额定转速范围内,电源系统发电机输出的功率不仅能够满足自行高炮各用电设备需求,并同时通过双向Buck/Boost变换器降压向超级电容充电[3-5]。
2 系统建模及控制器设计
2.1 双向Buck/Boost变换器控制策略
当自行高炮工作在加速、爬坡、减速以及刹车时,由于底盘发动机转速下降,导致电源系统发电机输出功率下降,根据自行高炮的用电功率分配控制策略,此时超级电容通过双向Buck/Boost变换器向电源系统进行放电。由于超级电容端电压在输出瞬时大功率时会大幅跌落,超级电容在提供大功率的同时需保持双向Buck/Boost变换器输出电压稳定于直流母线指定值Uref以改善发电机的运行特性,防止因超级电容端电压的跌落影响电源系统的供电质量,同时引入电感电流内环控制改善变换器的性能,因此,变换器处在Boost工作模式时采用直流母线电压外环、电感电流内环的双环控制结构。
当超级电容电量不足时,而自行高炮处于正常行驶状态,此时变换器处于Buck工作模式,发电机输出的功率除了提供给自行高炮各用电设备供电之外,其余功率通过Buck/Boost变换器给超级电容充电,按照超级电容特性及充电要求,采用先以给定指令iref=iLmax恒流充电,然后再以超级电容电压指令值UBAT恒压充电的方式控制[5-6]。
2.2 双向Buck/Boost变换器Boost模式控制设计
自行高炮行进间进行加速、爬坡、减速和刹车操作时,当底盘发动机转速下降到低于设计阈值,此时发电机输出功率小于炮车全部用电设备所需功率,为了改善自行高炮电源系统供电品质与稳定性,此时Buck/Boost变换器工作在Boost模式时,需要控制直流母线电压Um到Uref=325 V,因此,变换器工作在Boost模式时采用直流母线电压外环、电感电流内环的双环控制结构。对其进行电路建模,超级电容可等效为内阻r与恒压源ub串联。求得变换器在Boost模式下的交流小信号方程为[2-4]
(1)
通过上述方程可建立相应小信号等效电路,如图2所示。

根据小信号交流等效电路和稳态关系,可求得传递函数Gid_d(s)和Gvi_d(s),Gid_d(s)为变换器Boost模式下占空比到电感电流的传递函数,Gvi_d(s)为电感电流到输出电压的传递函数。
(2)
(3)
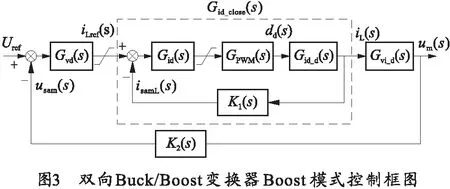
根据传递函数可得到其控制框图如图3所示。将直流母线采样电压Usam(s)与给定参考电压Uref进行比较,比较值经PI控制器Gvd(s)补偿得到iLref(s),电感电流iL(s)采样得到的采样值isamL(s)与电流环指令值iLref(s)比较后经PI控制器Gid(s)补偿,再通过PWM发生器生成变换器占空比dd(s),Gpwm(s)为PWM增益,Gid_close(s) 为电流环闭环传递函数。
2.3 双向Buck/Boost变换器Buck模式控制设计
当自行高炮处于正常行驶状态时,底盘发动机处于额定转速范围内,发电机输出功率不仅满足自行高炮各负载的用电需求,同时还通过双向Buck/Boost变换器给超级电容充电。此时变换器工作在Buck模式时采用电压环和电流环的双环控制,当超级电容端电压UBAT与给定参考电压Uref相差较大时,电压环饱和,变换器采用恒流方式给超级电容充电;当超级电容端电压UBAT与参考电压Uref相近时,电压环退出饱和,双向Buck/Boost变换器采用恒压方式给超级电容充电,充电电流随超级电容电量而下降,此时直流母线等效为恒压源,求得变换器在Buck模式下的交流小信号方程为[2-4]
(4)
通过上述方程可建立相应的小信号交流等效电路,如图4所示。

根据小信号交流等效电路和稳态关系,可求得传递函数Gid_c(s)和Gvi_c(s),Gid_c(s)为变换器在Buck模式下占空比到电感电流的传递函数,Gvi_c(s)为电感电流到输出电压的传递函数。
(5)
(6)
根据超级电容充电模式下双向Buck/Boost变换器的控制策略得到其控制框图,如图5所示,将超级电容电压ub(s)采样得到的电压usam_1(s)与给定参考电压Uref进行比较,比较值经PI控制器Gv(s)补偿得到iref(s),然后将电感电流采样值iL_sam1(s)与电感电流内环指令值iref(s)比较后经过PI控制器Gic(s)补偿,再经PWM发生器生成变换器占空比dc(s),Gpwm(s)为PWM增益,Gic_close(s) 为电流环闭环传递函数。

3 试验验证
为了验证双向Buck/Boost变换器拓扑结构和控制方法的正确性和可行性,搭建了8 kW双向Buck/Boost变换器的试验平台。直流母线输出电压为325 V,超级电容两端电压为190~220 V之间,直流母线负载为13 kW.在底盘发动机为怠速运转(800 r/min)时,发电机输出功率为9.8 kW;当底盘发动机额定转速为1 500 r/min时,发电机额定功率为20 kW,超级电容电压为195~220 V,Buck/Boost变换器最大输出功率为8 kW,当检测到发电机转速低于1 000 r/min时,输出功率为13.5 kW,变换器实现由Buck模式向Boost模式切换,同理,当发电机高于1 200 r/min时,输出功率为16.5 kW,变换器实现由Boost模式向Buck模式切换。
变换器控制系统采用TMS320F2808 型DSP,采样直流母线电压和电流,超级电容两端电压,输出电感电流,发动机转速,经过信号调理送入DSP,对采集的信号进行处理与分析,其程序流程图如图6所示。
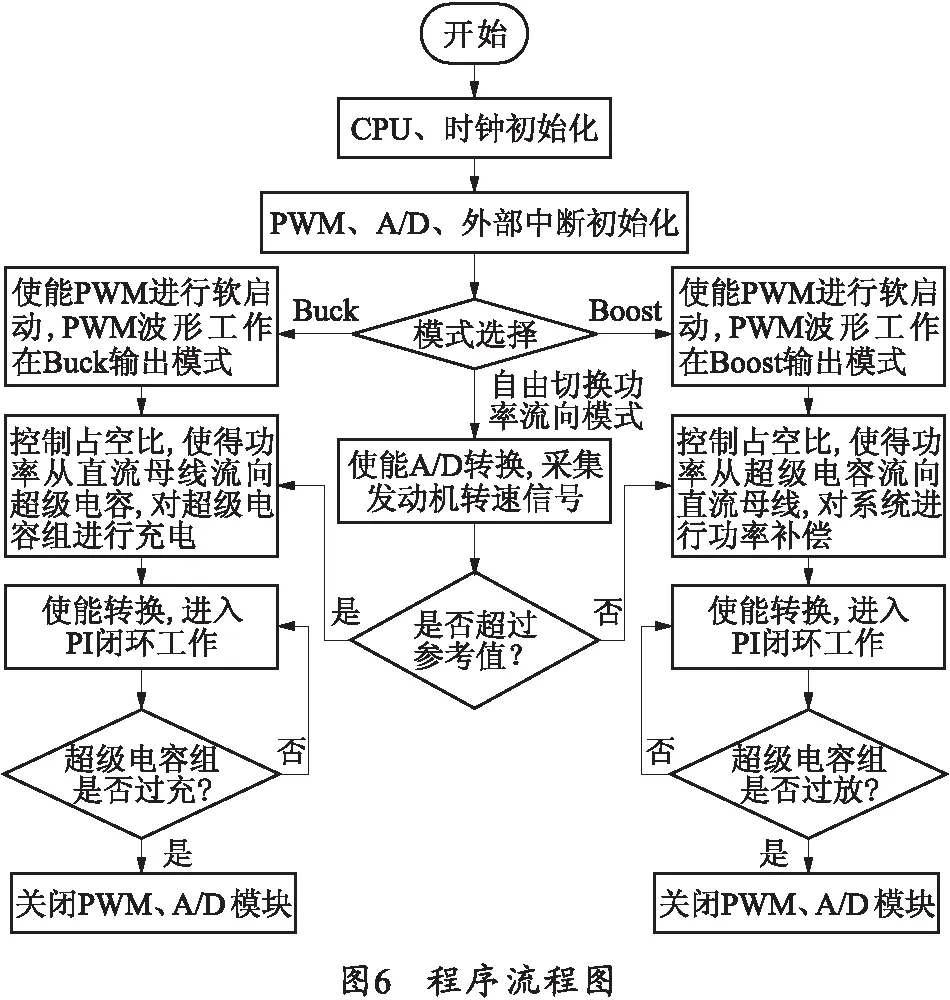
图7为双向Buck/Boost变换器从Buck模式切换到Boost模式下直流母线电压和电感电流波形图,直流母线负载为10 kW,由图7可见,变换器由Buck可工作模式切换到Boost模式时,电感电流稳态误差小,切换后直流母线电压稳定在325 V左右,显示了变换器良好动态切换性能。
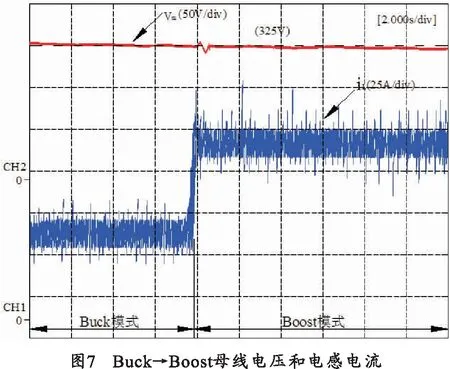
图8为双向Buck /Boost变换器工作在Boost模式,直流母线负载由13.5 kW切换到10 kW变换器的动态性能图。由图8可见,变换器工作在Boost模式下时,在对应负载突变时系统的响应时间为85 ms左右,同时电感电流和直流母线电压的超调量较小,显示出良好的动态性能。
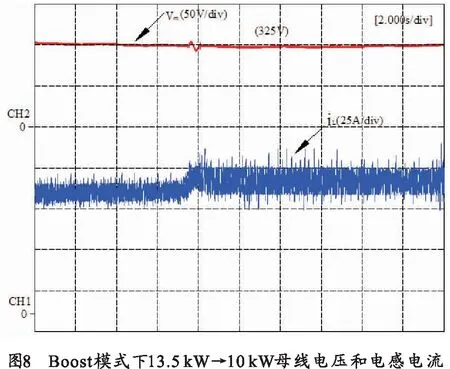
图9为双向Buck/Boost变换器从Boost模式切换到Buck模式下直流母线电压和电感电流波形图。由图9可见,变换器由Boost工作模式切换到Buck模式时,切换响应时间在80 ms左右,输出电压和电感电流的超调量较小,切换后母线电压稳定在325 V左右,显示出良好的动态切换性能。
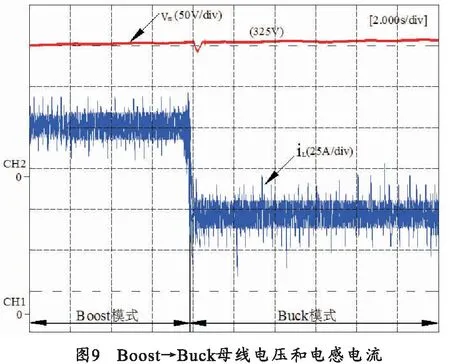
图10为双向Buck/Boost变换器在Buck工作模式下,直流母线负载由10 kW切换到13.5 kW,直流母线电压和电感电流波形图。

由图10可见,变换器工作在Buck模式时,负载突变时系统响应时间为90 ms左右,且直流母线电压和电感电流的超调量较小,显示出较好的动态性能。
可见,笔者设计的双向Buck/Boost变换器在自行高炮行进间两种不同工作模式下或者不同工作模式之间的切换过程中,系统响应时间较快,电压和电流超调量较小,动态性能良好。
4 结束语
笔者从自行高炮行进间作战需求出发,对炮车底盘主机电站进行了分析,为了解决主机电站发电机输出随底盘发动机转速波动而带来输出功率下降的问题,提出了一种基于双向Buck/Boost变换器的功率补偿系统,并推导了不同模式下变换器的动态模型,设计了不同工作模式下的闭环控制器。试验结果表明,所采用的双向Buck/Boost变换器在两种工作模式下或者不同工作模式直接相互切换时,系统响应时间较快,动态性能良好,能够满足自行高炮电源功率补偿系统的应用要求。
