小口径高炮对高速目标毁歼概率研究
2019-09-23邓辉咏何循来殷军辉张伟召
邓辉咏,何循来,殷军辉,王 聪,张伟召
(1.陆军工程大学石家庄校区,河北 石家庄 050003;2.南通理工学院,江苏 南通 226002;3.陆军炮兵防空兵学院,河南 郑州 450007)
小口径高炮由于射速高、初速快,射击密集度高,在近程具有较高的效费比,是己方高价值目标的末端防空武器。有效的高炮对目标毁歼概率的计算模型,能够对高炮武器系统的效能分析、方案评价和作战研究提供有力保障。
对高炮毁歼概率的研究,许多学者做了积极探索,肖元星[1]等较系统地研究了高炮武器系统着发、近炸、空炸射击时的毁歼概率模型,但在计算着发时,采用解析法,模型推导过程作了较大简化,不能计算下滑、俯冲等任意航路的点射毁歼概率。文献[2]基于蒙特卡罗法,采用仿真的思路计算着发射击毁歼概率,能够对任意目标、任意飞行航路的毁歼概率进行计算,但这种方法需要对目标的外形轮廓进行简化,目标轮廓方程不易建立。文献[3-4]对弹丸初速、弹道系数以及目标飞行参数对着发射击毁歼概率的影响进行了研究;文献[5]根据射击误差的相关性和重复性,研究了各类误差的产生方法,其本质还是简析模型的运用。
现代高炮武器系统,尤其是自行高炮在伴随防空过程中,两炮间隔有时可达1 000 m以上,因此必须考虑配置地域带来的炮目距离差引起的毁歼概率变化,另外,对于高速运动目标,例如弹道末速度达550 m/s的钻地精确制导炸弹,必须考虑点射时各发弹弹着点引起的毁歼概率变化。笔者在分析射击误差来源的基础上,结合仿真法和解析法,逐弹逐炮计算对目标的毁歼概率,进而求取一次点射毁歼概率。
1 射击误差分析
在理想情况下,不考虑误差,弹丸能够在提前点准确命中目标,但由于误差的存在,实际弹着点与理想弹着点有偏差。高炮的射击误差包括[6]:不相关误差、弱相关误差、强相关误差和系统误差(由于现代高炮基线已经修正,不考虑单炮系统误差)。
1)不相关误差。不相关误差指以同样的射击诸元发射多发弹,由于各种随机因素影响而造成的实际弹道与理论弹道的偏差,表现为弹丸在弹道平面内随机分布,其均值为0,通常用高低和方向散布中间误差或均方差来描述,一般用σN、σZ表征。在用仿真法计算高炮毁歼概率时,散布误差为不相关误差,服从正态分布,可用直接抽样的方法生成服从某个方差分布的随机数。
2)弱相关误差。弱相关误差包括:火控解算系统和跟踪系统引起的误差σr1、σr2,火炮随动系统和稳定系统引起的误差σr3、σr4.跟踪时每发弹的提前点均存在误差,因此σr1、σr2与点射长度相关;而σr1还应增加火控系统之间的误差,因此与点射长度和火控系统有关;σr3、σr4与点射长度和火炮有关,牵引高炮无稳定系统,σr4取0.弱相关误差可认为相关系数为(0,1).
3)强相关误差。强相关误差包括气象测量误差σq1和初速准备误差σq2.σq1与某次点射所处的条件有关,主要包括修正空气密度误差均方差σΔk、修正纵风风速误差均方差σFx、修正横风风速误差均方差σFz;显然,σq2也只与射击条件有关,一般用修正初速准备误差均方差σv0p表征。强相关误差可以认为相关系数为1的误差。
4)高低角和方位角的系统误差σφ、σβq.该误差只与火炮有关,在弹道平面内表现为与理想点实际偏差。
前述的相关性是指同一时刻每发弹是一致的,但在不同时刻,后一发弹对前一发弹具有相关性。对于弱相关误差,认为是方差数和相关系数已知的正态分布数,可以先随机生成所需要服从分布的随机数,再经过相关的抽样模型处理。
2 仿真模型
2.1 相关性误差抽样模型
由于高低和方位误差的相关性很小,因此可以将二维问题转换成两个一维平稳随机问题。首先根据点射长度n,生成n个独立的服从的随机数{u1,u2,…,un},则考虑相关性误差时第k发弹的随机误差抽样ηk为[7]
(1)
式中:α为相关系数;Δt为两发弹时间间隔,取Δt=60/(ph),h为单管分钟射速,p为管数。
2.2 误差合并
从前面分析可知,火炮随动系统和稳定系统产生相关性误差时机是一致的,为了提高计算机的运行速度,可以将这两个误差合并。设随动系统和稳定系统的相关系数分别为r3、r4,则合并后的相关系数rh和方差σh为
(2)
(3)
显然,对于牵引高炮σr4取0后,合并表达式退化成只含随动系统误差。
2.3 考虑地域配置不同的处理
考虑到高炮的配置范围不会太大,因此忽略配置地域在高度上的差异。设基准炮位于O0点,建立基准坐标系O0-x0y0z0,目标提前点Mq在基准坐标系中的坐标为(x10,pq0,Hq).第i门炮位于Oi点,其在基准坐标系中的坐标为(ricosθi,risinθi,0),在Oi点建立第i门炮的坐标系Oi-xiyizi,各坐标轴与基准坐标系各轴同向,各炮与基准炮相对位置关系如图1所示。则目标提前点在坐标系Oi-xiyizi中的坐标为
(4)

2.4 毁歼概率表达式
强相关误差和弱相关误差在仿真计算时,首先按散布误差生成正态分布的随机数,然后按2.1节方法对各数据进行相关性处理,计算毁歼概率时可依次抽取处理后的误差数据,作为某发弹的诸元误差,结合散布误差和系统误差,则可按文献[1]中单管单发的模型计算第i发弹的毁歼概率,即
(5)
式中:A=(a1,a2)T为高低和方位系统误差组成的列向量;Σ为高低方位散布误差组成的矩阵、相关性处理后高低方位射击诸元误差(除系统误差)组成矩阵和,其中气象测量误差和初速准备误差矩阵中各元素的求取参考文献[1],其余误差对角元素分别为高低误差和方位误差,其余元素为0;w为毁歼目标所需平均弹数;l为目标三向面积在弹道平面内投影面积等效正方形边长,该参数与弹丸终点速度、目标速度和目标飞行姿态相关[1],而目标在任一时刻的速度和飞行姿态可通过目标的航路数据/方程得到。
由于仿真需要大量的计算,直接用积分求单发毁歼不经济,有必要对其进行变换,通过变换,式(5)可变换为
(6)
(7)
式中:λ1、λ2为Σ的特征值;θ为Σ对角化的单位正交阵角元素,其计算式为
(8)
式中,σij为Σ中的元素。
由于式(6)为标准正态分布概率密度函数积分,可转化为
(9)
φ(x)的近似计算式可见文献[1].经过转换近似计算,Pki由积分式转换成乘法运算,使计算效率大大提高。若有m门火炮,每门火炮有p个身管,每管发射n发弹,则进行一次点射的毁歼概率为
(10)
2.5 仿真流程
图2为小口径高炮对高速目标毁歼概率的仿真计算流程,图中Ns、L、m、n、p分别为仿真次数、火控门数、火炮门数、单管射弹发数以及火炮身管数。为了提高计算精度,应尽可能提高仿真次数Ns.

3 仿真算例
为了验证计算方法的正确性,用解析法和本文方法分别进行计算,计算条件:某35高炮的误差和射表数据,2门高炮射击,极坐标参数设为(0,0),单管18发;目标数据:三向面积分别为0.833、0.833、0.221 m2,俯冲角0°,速度340 m/s,航捷500 m,高度200 m,目标临近,平均毁歼弹数为1.34.
为了有比较性,用本文的方法计算时,强制点射过程中目标位置不改变,仿真次数设300,计算数据如表1所示。

表1 某35高炮不同航程对目标的毁歼概率 m
从仿真的结果来看,整个航程的平均毁歼概率吻合较好,相对误差约为3.1%,说明本文计算方法的正确性,但本文的计算结果更符合指数函数的变化规律,即在航程的两端变化较平缓,而中间变化较快,与适用的指数毁歼率相符。
以文献[1]中例6.1基本数据为例,第2门炮相对于基准炮的极坐标为(500 m,120°).目标按表2中数据飞行(时间为基本变量,中间值按4次样条插值获取)。在时间t=0,1,2,…,5 s时刻分别做一次单管18发的点射。

表2 目标飞行航路数据
通过MATLAB编制程序仿真计算,得到各时刻点射的毁歼概率数据,如图3所示。

从图3可以看出,炮2的毁歼概率总体上比基准炮要小且其变化趋势基本一致。这是由于目标相对于炮2比相对于基准炮的航路截径和航程都较大。因此,在计算多炮协同作战的毁歼概率时,必须考虑各炮的配置地域。
图4为t=3 s时刻点射各发射弹的毁歼概率。
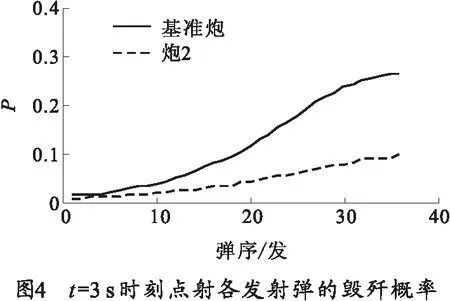
从图4可以看出,各发射弹的毁歼概率总体上具有不断增加的趋势。这是因为在t=3 s时刻,目标的绝对速度达到980 m/s,而两发弹的时间间隔为0.056 s,即在该时间间隔内,目标向阵地临近约50 m.随着目标的不断临近,各发弹的毁歼概率不断增加,因此在计算高速运动目标时,必须考虑目标位置的变化。
4 结束语
笔者通过对射击误差分析和其中相关性误差抽样建模,设计了用解析法计算高炮单管单发毁歼概率进而求取一次点射毁歼概率的计算方法;并给出了仿真计算流程。该方法只需输入目标的三向面积,不需对目标的外形轮廓建模,简化了计算。另外,该方法考虑了火炮配置地域差距、点射时间差带来的毁歼概率影响,适合对高速目标毁歼概率的计算。
