磁致伸缩触觉传感器的输出特性研究*
2019-09-21王博文李云开
张 冰,王博文,李云开
(1.省部共建电工装备可靠性与智能化国家重点实验室,河北工业大学电气工程学院,天津 300130;2.河北省电磁场与电器可靠性重点实验室,河北工业大学电气工程学院,天津 300130;3.河南牧业经济学院能源与动力工程学院 郑州 450011)
触觉传感器在工业机器人、智能机器人灵巧手和医疗等领域具有广泛应用。国内外研究者对于触觉传感器设计与特性测试做了诸多研究工作,提出了具有不同传导机制的触觉传感器,如压阻、压电、电容和光学传感器,用于感知压力、振动和温度等参数。中国科学研究院石继东等人提出了一种用于手腕脉冲和声波等小振动检测的大量程柔性压阻式触觉传感器,测量范围0~25 kPa[1]。文献[2]介绍了一种利用压电效应的传感器阵列,通过滑动检测物体表面特征的螺距和宽度信息,空间分辨率高达500 μm。Li等人设计了一种具有交叉指状和双涡流结构的可伸缩电容式传感器,用于高灵敏度触觉感知[3]。然而目前的触觉传感器在实际应用中仍存在一定的局限性,如精度低、温度依赖性大和信号处理电路复杂等,无法满足对触觉信息精确测量和感知的要求[4]。
为加快触觉传感器的实际应用进程,需要应用新的触觉传感理论和智能敏感材料,发展新型触觉传感器。新型Fe83Ga17合金(Galfenol)具有低磁场下磁致伸缩大的优点,能够承受拉伸和冲击等机械载荷,还可与力直接耦合,机电耦合效率高,如片状Galfenol悬臂梁的换能密度可达22 mW/cm3,这是压电材料无可比拟的[5-6]。可见应用Galfenol磁致伸缩材料实现力-磁场-电压的转换,设计新型的触觉传感器,具有重要的理论意义和实际应用价值。
本文参考悬臂梁结构特点,利用逆磁致伸缩效应,应用片状Galfenol磁致伸缩材料设计制作了一种新型的触觉传感器,结构简单,性能稳定,用于实现机械手抓取时接触力和目标物体刚度的测试。

图1 磁致伸缩触觉传感器结构图
1 触觉传感器结构与输出特性
1.1 磁致伸缩触觉传感器结构
设计的磁致伸缩触觉传感器如图1所示。传感器由硬质触杆、Galfenol悬臂梁、永磁体、霍尔元件、外壳和底座等组成。悬臂梁选用取向<100>的多晶Fe83Ga17磁致伸缩材料,单层片状结构,长度、宽度和高度分别为l、w和h,一端固定在骨架底座上,另一端与硬质触杆相连,用于接收并传递接触力。梁的自由端和固定端上方放置两块极性相反的Nd2Fe14B永磁铁,为Galfenol悬臂梁提供沿长度方向的偏置磁场H,两永磁体的中心距为36 mm,永磁体下表面距悬臂梁上表面为13.3 mm。硬质触杆为“工”字结构,固定在悬臂梁的自由端作为力的传递元件接触物体,传递力和位移信号。霍尔元件为信号采集单元,采用A1321LUA型霍尔芯片(测试104Oe内的磁场,灵敏度为5 mV/Oe),放置在靠近悬臂梁固定端的内表面。触觉传感器与机械手指集成,如图1(d)所示。传感器的工作原理为:当硬质触杆接收到垂直方向的力时引起悬臂梁发生形变,由于逆磁致伸缩效应,Galfenol材料内部的磁感应强度发生改变,进而影响霍尔元件区域磁感应强度的变化,最终改变霍尔元件的输出电压,把力转换为电压信号。
传感器的核心元件为Galfenol悬臂梁,永磁体与Galfenol悬臂梁形成磁通回路。由于Galfenol材料中磁感应强度对压应力敏感,所以霍尔元件放置在悬臂梁的应力集中处,以提升传感器灵敏度。此设计结构受温度影响较小,具有较高的输出稳定性,可以测试接触力并检测物体刚度。
1.2 传感器的输出电压与接触力关系
依据霍尔效应进行磁电转换,通过霍尔元件检测Galfenol悬臂梁磁通的变化。材料表面磁感应强度的变化与材料内部变化近似成线性关系[7],可以得出霍尔元件的输出电压UH为:
UH=KHBH=KHKsBGal
(1)
式中,UH为霍尔元件输出电压;KH为等效霍尔参数,Ks为磁感应强度传递系数,BGal为Galfenol材料内部磁感应强度。
由磁感应强度公式可知,Galfenol材料内部磁感应强度B为可表示为:
BGal=μ0(H+M)
(2)
式中,H为永磁体产生的偏置磁场,μ0为真空磁导率,M为磁化强度。
Galfenol材料在外部作用力F作用下磁畴发生转动,导致材料内部的磁化强度M变化。Dapino等人基于磁机械效应定律建立了应力与磁化强度关系模型[8]。在理想情况下,考虑文献[7]并应用变形的Langevin方程[9]可以得到与应力相关的无磁滞磁化强度:
(3)

(4)

(5)
将式(5)代入(4),得:
(6)
式(6)中含有参数σ,故在图1中,以悬臂梁的长度方向为x轴,高度方向为z轴,x轴取在悬臂梁中性面层。对所建立的模型作出以下假设:①Galfenol悬臂梁符合欧拉-伯努利梁结构动力学理论;②磁场在悬臂梁材料中沿x轴均匀分布。
由欧拉-伯努利梁结构动力学理论可以得到悬臂梁挠度与受力的关系:
(7)
x为自由端到梁固定端的距离,F为施加在触杆处的力,E为Galfenol材料刚度系数,I为截面转矩。
在恒定的偏置磁场H下,根据材料力学可以得出悬臂梁受到力F产生弯曲时,在厚度为z处的x轴向应变与曲率的关系为:
(8)
由变形的胡克定理,霍尔元件处所检测的悬臂梁平均压应力为:
(9)
材料的中性面上方受到沿轴向压力,中性面下方受到沿轴向拉力,当偏置磁场较高时,拉应力不会引起磁感应强度的变化[11],故中性面下方M不变。
通过式(9),式(6)和式(2)得:
(10)
式(10)为触觉传感器的接触力测试模型,表明传感器的输出电压U与接触力F成反比。
1.3 传感器的输出电压与目标物体刚度关系
手指可以感受到物体的弹性和粗糙度,是手指皮肤内的机械感受器可以从外界刺激中获得信息。哈佛大学的Pawluk等考虑机械感受器的结构特征,提出手指皮肤机械感受器的力学模型,如图2所示。机械感受器上下方皮肤组织等效为两个弹簧ks1和ks2,当皮肤受压变形时,机械感受器通过感受皮肤表面压力及位移,产生动作电位来传递神经信号。
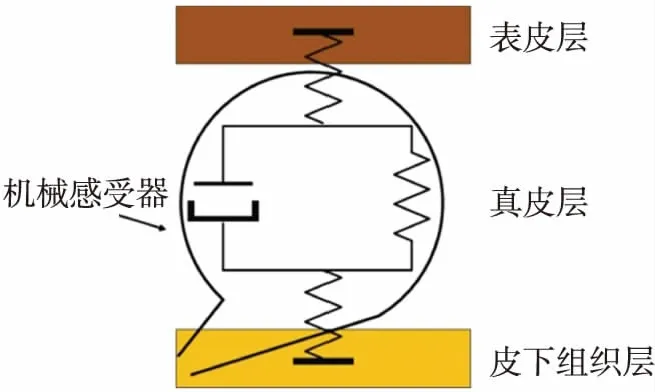
图2 皮肤机械感受器力学模型
根据仿生学原理,将Galfenol悬臂梁等效为表皮区组织,接受外力及位移信号,霍尔元件及信号处理放大电路构成的电磁检测系统等效为机械感受器,对压力及位移信号进行接收处理。对物体弹性检测时,被测物体和悬臂梁接触,传感器通过控制机械手对物体抓取或按压,可以给定一个位移输入,进而实现将物体的变形信号转化为力信号。
图3为磁致伸缩触觉传感器测试刚度的物理模型,假设被检测物体是弹性材料,测量时将传感器触杆贴近固定的被测物体,此时悬臂梁和被检测物体等效为两弹簧串联。通过给传感器整体施加一个相同的进给位移L,被测物体发生位移为Lm的形变,对应的悬臂梁会产生自由端挠度为L-Lm的变形。不同弹性的物体具有不同的刚度系数,在同一个进给位移下,悬臂梁会受到不同的力,由Galfenol悬臂梁接触力测量模型可知,在检测不同刚度时悬臂梁所受力不同,传感器输出不同的电压值,进而辨识物体的刚度。

图3 传感器刚度检测物理模型
根据图3中的模型,可以得到位移L和传感器受力F(悬臂梁和被测物体受力同为F)的关系:
F=KLL=Lc+Lm
(11)
式中K为测量系统总等效刚度系数;Lc为悬臂梁触杆处挠度,Lm为物体形变量。
由于此时悬臂梁和被检测物体等效为两弹簧串联,如图3中所示,可得到其整体刚度系数为:
(12)
式中Kc为悬臂梁等效刚度系数,Km为待测物体刚度系数。
由式(11)和(12)可得:
(13)
悬臂梁的等效刚度系数Kc一定,可以由式(7)可知,在自由端处,悬臂梁挠度取最大值,此时:
(14)
故可以得到悬臂梁等效刚度系数:
(15)
由式(13)和(15)可得:
(16)
对于弹性不同的物体具有不同的刚度系数Km,所以在同一个进给位移L下,检测不同刚度的物体会得到不同的力的输出,物体的刚度系数越大,输出的力越大。
由式(10)和式(16)可以得到:
(17)
式(17)为触觉传感器的刚度测试模型,可知传感器的输出电压U与被测物体的刚度系数Km成反比。
2 理论分析和实验研究
应用式(10)和式(17)可以计算磁致伸缩触觉传感器的输出特性。计算模型中的材料参数如表1[12]。

表1 Galfenol材料参数
材料参数b通过静态磁特性测试得出,触觉传感器中悬臂梁的有效长度l=40 mm,宽度w=8 mm,厚度h=1 mm。磁感应强度传递系数Ks=0.004 28,根据霍尔元件特性曲线知系数KH=5 mV/Oe。
选取了四种不同刚度系数的样本材料,包括海绵、泡沫1、泡沫2和橡胶,表2给出了材料的刚度系数。样品的尺寸均为20 mm×20 mm×20 mm。
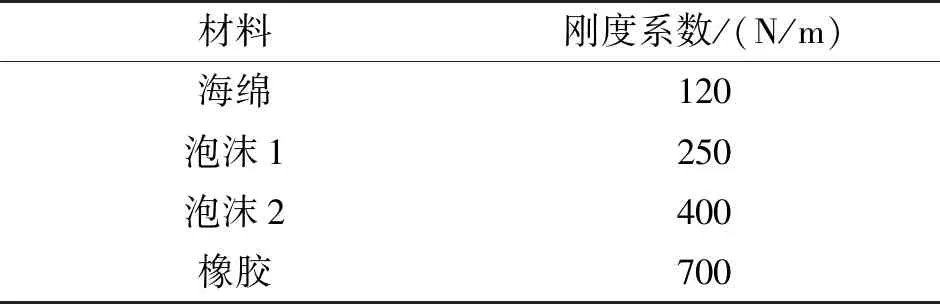
表2 样本材料刚度系数
搭建了触觉传感器的测试系统,如图4所示,主要由机械手、磁致伸缩触觉传感器、FSR400电阻式压力传感器,信号处理及放大电路,信号采集卡和稳压电源组成。机械手采用二指灵巧手,固定于支架上。FSR400电阻式压力传感器固定到机械手一手指上,用于确定抓取力大小,将磁致伸缩触觉传感器安装到机械手另一个手指上,用于测试。信号采集卡同时采集FSR400电阻式压力传感器和磁致伸缩触觉传感器的输出电压信号。稳压电源为霍尔元件、FSR400电阻式压力传感器和放大电路提供稳定直流电源。
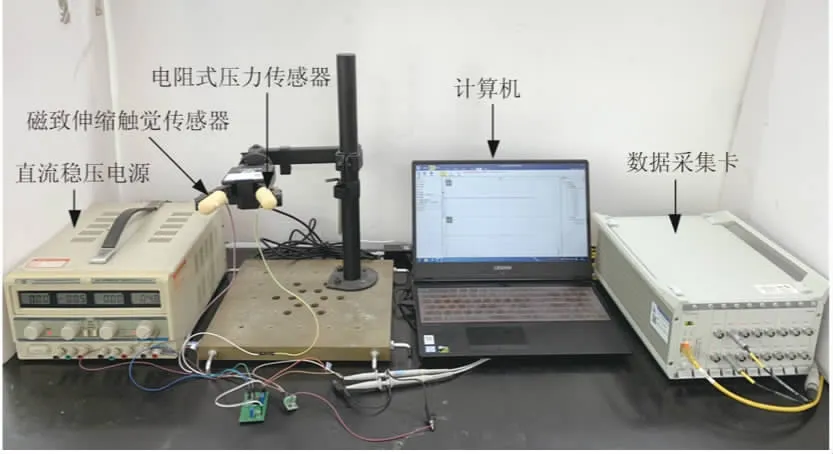
图4 磁致伸缩触觉传感器测试系统平台
图5示出了实验测得在不同偏置磁场下传感器输出电压与施加力F的关系,当施加力小于1 N时,输出电压随力的增加快速降低,施加力大于1 N时,输出电压随力的增加缓慢降低。在偏置磁场为2.56 kA/m、施加力为1 N时,输出电压相对于未施加力时的变化值为22.8 mV,分辨率为0.07 N,表明应用传感器测试目标物体受力时具有较高的灵敏度。图5还示出了应用式(10)得到的计算结果。实验结果与计算结果基本是一致的,表明可以应用式(10)描述传感器的输出电压与接触力的关系。实验结果与计算结果存在少量误差,这可能是受力后悬臂梁弯曲,磁路微小改变引起的。考虑到磁路的微小改变对输出的影响较小,将其在模型计算中忽略了。

图5 不同偏置磁场下输出电压U与接触力F的关系
在不同偏置磁场下,传感器输出电压相对于未施加力时的变化值ΔU与力之间的关系如图6所示。可以看出当偏置磁场小于2.56 kA/m时,输出电压的变化值ΔU随偏置磁场增加而增加。当偏置磁场大于2.56 kA/m时,输出电压的变化值ΔU随偏置磁场增加而减小。当偏置磁场为2.56 kA/m时,输出电压的变化值ΔU取得最大值。实验结果表明传感器在偏置磁场为2.56 kA/m时具有较高的灵敏度。

图6 不同偏置磁场下传感器输出电压的变化值与接触力之间的关系

图7 磁致伸缩触觉传感器测试系统平台
为进一步探究磁致伸缩触觉传感器的重复性和稳定性,控制安装有触觉传感器的机械手指反复夹取和张开,使触觉传感器在0~1 N时循环受力。每循环200次后,施加外力从0 N线性增加至1 N,再减小至0 N,记录在偏置磁场2.56 kA/m下触觉传感器输出的电压值,如图7所示。从图中看出,经过200次和400次循环后的测试曲线和初始曲线趋势一致,而且输出电压无衰减,确定了传感器的稳定性能。在每次力加载和卸载过程中,存在滞后现象,滞后误差约为4.3%。
应用式(17),给定位移0.7 mm,计算得到传感器在不同偏置磁场下的输出电压与目标物体刚度系数的关系如图8所示。结果表明,当物体刚度系数小于1 000 N/m时,输出电压随物体刚度系数的增加快速降低,刚度系数大于1 000 N/m时,输出电压随物体刚度系数的增加缓慢降低。表明可以应用传感器测试目标物体的刚度系数,进而确定物体的弹性。

图8 不同偏置磁场、位移L=0.7 mm时输出电压U与物体刚度系数Km的关系
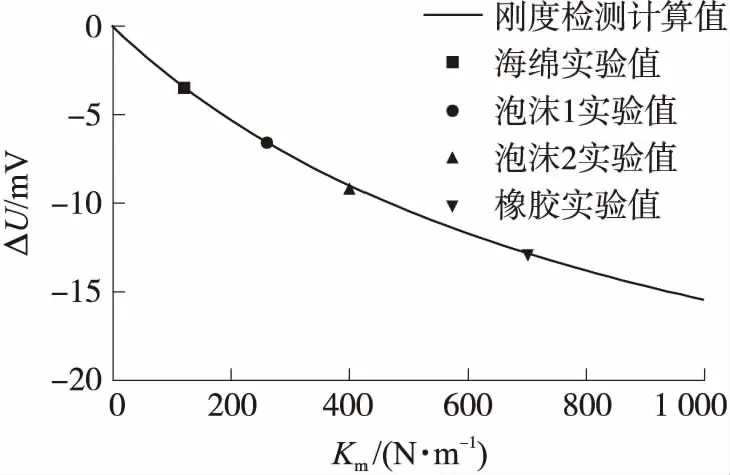
图9 输出电压变化值ΔU与物体刚度系数Km的关系
为了测试不同目标物体的刚度,实验选取海绵、不同刚度的泡沫和橡胶作为实验样本。初始状态下,机械手指完全张开,并保证样本的左右表面距两个机械手指接触面的距离相等,设置机械手的夹取速度为1.5×10-2m/s,确认机械手指接触到样本表面后,控制机械手指对样本继续夹紧0.7 mm。实验得到的输出电压变化值ΔU与物体刚度系数Km的关系如图9所示。应用式(16)得到的计算结果一并示于图9,计算选取进给位移L=0.7 mm,偏置磁场H=2.56 kA/m。实验结果表明,传感器的输出电压变化值ΔU随物体刚度系数Km的增加而增大。这与应用式(16)得到的计算结果是一致的。表明设计的传感器可以用于机器人机械手对物体刚度的测试,进而确定物体的弹性。
3 结论
设计制作了一种新型的磁致伸缩触觉传感器,应用电磁学理论、逆磁致伸缩效应和胡克定理,建立了触觉传感器的输出特性模型。计算结果与实验结果基本符合,表明建立的模型可以描述触觉传感器的输出特性。研制的触觉传感器在接触力小于1 N时具有较好的输出特性。偏置磁场低于2.56 kA/m时,输出电压变化值随偏置磁场增加而增加,偏置磁场高于2.56 kA/m后,电压变化值随偏置磁场增加而逐渐减小。在偏置磁场为2.56 kA/m,力为1 N时,传感器输出最大电压值为22.8 mV。根据提出的刚度检测方法,传感器可以对目标物体刚度进行检测,进而确定物体的弹性。设计的磁致伸缩触觉传感器可有效应用于测试机械手抓取力和目标物体弹性。
