电容式柔性触觉传感器设计*
2019-09-21宋爱国李会军冷明鑫
易 艺,宋爱国,李会军,冷明鑫,徐 波
(1.东南大学仪器科学与工程学院,南京 210096;2.桂林电子科技大学信息科技学院,广西 桂林 541004;3.国网江西省电力有限公司检修分公司,南昌 330096)
触觉传感器是一种将触觉信号转换为电信号的器件或装置,它作为机器人获取外界环境信息的非视觉传感技术之一,对机器人的智能决策与控制至关重要[1]。柔性触觉传感器是触觉传感器的一种[2],它可以覆盖在机器人或义肢的表面,类似于人类的皮肤,为机器人或穿戴义肢的残疾人感知外界的环境信息[3],在智能机器人、可穿戴电子设备、医疗检测和智能义肢等领域具有潜在的应用前景[4-5]。
随着微电子技术、制造技术、3D打印技术、纳米技术的发展和各种新型材料的出现,如何设计出具有灵敏度高、分辨率高、成本低、结构简单,且接近人类皮肤性能的电容式柔性触觉传感器成为科研工作者研究的热点问题[6]。美国的Surapaneni R等人[7]设计了浮动式梳子型电容式柔性触觉传感器,通过测量梳子型电极重叠面积的变化来实现剪切力的测量。德国的Cagatay E等人[8]设计了以喷镀碳纳米管作为电容电极的电容式柔性触觉传感器,通过改变介质材料隔片来调整传感器特性,实现微小压力的测量。中国科学院半导体研究所的Hu X H等人[9]设计了以针状结构作为介质层的电容式触觉传感器,具有良好的稳定性和重复性,但是制作工艺复杂,成本较高。上海交通大学的ZHUO B G等人[10]提出以微结构的PDMS层作为介质层设计的电容式柔性压力传感器,具有成本低、灵敏度高等优点,但传感器的量程较小。
近年来,虽然国内外的科研工作者设计了各种各样的电容式柔性触觉传感器,但是它们大都处于实验研究阶段,产品化的电容式柔性触觉传感器不多,广泛应用于机器人的电容式柔性触觉传感器更少[11-13]。因此制备结构简单、低成本、高性能的电容式柔性触觉传感器仍为目前科研人员的一个研究热点[14]。
本文以PORON聚氨酯材料作为电容式触觉传感器电极间的弹性绝缘介质,导电膜作为触觉传感器的上、下电极,采用有机硅胶薄膜和导电膜制作屏蔽保护层,设计了一种制备工艺简单的电容式柔性触觉传感器。
1 电容式柔性触觉传感器设计
1.1 触觉传感器结构设计与工作原理

图1 电容式柔性触觉传感器结构设计
根据平板电容器的原理,电容式柔性压力敏感单元由上电极、弹性绝缘介质和下电极组成,其结构如图1(a)所示。它以PORON聚氨酯材料为弹性绝缘电介质,两片在空间上呈垂直分布的导电膜分别交叉粘贴于PORON聚氨酯材料的上、下表面构成传感器的上、下电极,它们一起组成电容式柔性压力敏感单元。由于电容式柔性压力敏感单元易受到外界环境的影响,为了提高其抗干扰能力,在传感器的上、下电极表面都增加了由有机硅胶薄膜和导电膜一起组成的屏蔽层,屏蔽层上的导电膜接地,屏蔽外界干扰信号对电容电极的影响。设计完成的单点电容式柔性触觉传感器结构如图1(b)所示。
在图1中,设A为上、下电极的有效面积,d为上、下电极间的距离(柔性绝缘介质的厚度),真空介电常数为ε0(8.854×10-12F/m),电极间介质的相对介电常数为εr。根据平板电容的原理可得到该电容式柔性触觉传感器的电容量[15]公式为:
(1)
假设PORON聚氨酯材料为线弹性体,满足胡克定律,当外力施加于电容式柔性压力敏感单元的表面时,PORON聚氨酯材料因受到压力被压缩,上、下电极之间的距离d减小,由式(1)可知电容式柔性压力敏感单元的电容量将随着距离d减小而增加。当施加的外力释放后,因其具有回弹性,可以恢复到原来的位置,电容式柔性压力敏感单元的电容值也会恢复到初始值,因此可以通过检测电容的变化量来实现触觉压力的检测。
设εr和A为常数,电容传感器未施加压力时,两个电极之间的距离为d0,由式(1)可得电容传感器的初始电容量C0为:
(2)
当给电容传感器施加压力时,电极间的绝缘弹性介质层因受到压力被压缩,上、下电极之间的距离会减小,设电极之间距离减小了Δd,电容增量为ΔC,由式(1)可得此时的电容值为:
(3)
从式(3)可知,电容传感器的输出特性C=f(Δd)不是线性的关系,只有当Δd/d0≪1时,式(3)可以简化为:
C=C0+ΔC=C0+C0·(Δd/d0)
(4)
此时,由式(4)可知,电容的变化值ΔC与Δd近似为线性关系。
1.2 柔性触觉传感器制作
在实验阶段,电容式柔性触觉传感器的制作过程如图2所示,分为传感器柔性电容单元的制作、传感器屏蔽保护层的制作。

图2 电容式柔性触觉传感器制作过程
①传感器柔性电容单元的制作:选1.9 mm厚的PORON聚氨酯材料作为传感器电极间的弹性绝缘介质,将其裁剪为5 mm×5 mm的正方形,然后在其上、下表面分别交叉粘贴导电膜,作为柔性电容单元的上、下电极,导电膜在空间上呈垂直分布[16],导电膜与PORON聚氨酯材料粘贴在一起,形成单个柔性电容单元,如图2(a)所示。
②传感器屏蔽保护层的制作:选一层很薄的有机硅胶薄膜作为电容式传感器的保护层,在其表面粘贴导电膜,作为电容式传感器的屏蔽层,然后在导电膜的另一表面再粘贴有机硅胶薄膜作为屏蔽层与电容极板间的绝缘层,导电膜与两片有机硅胶薄膜粘贴在一起,形成电容式柔性触觉传感器的屏蔽保护层,如图2(b)所示。
③将制作好的传感器屏蔽保护层分别粘贴于柔性电容单元的上、下电极表面,构成电容式柔性触觉传感器,并用软屏蔽线将电容式柔性触觉传感器的电极引出,得到制作完成的电容式柔性触觉传感器的实物图如图3所示。

图3 电容式柔性触觉传感器实物图
2 传感信号采集与处理系统
2.1 采集与处理系统组成
触觉传感信号的采集与处理系统包括控制电路、微弱电容检测电路、USB转串口电路和上位机,其系统框图如图4所示。

图4 采集与处理系统框图
选用STM32F103C8T6微控制器构成的最小系统作为控制电路,实现对微弱电容检测电路的控制和传感器数据的处理,并将传感器数据通过串口发送给上位机进行显示,同时微控制器也可以接收上位机的控制命令,实现双向通信。
为了采集触觉传感器的微小电容值,选用ANALOG DEVICES公司生产的24位电容数字转换器AD7746芯片来设计微弱电容检测电路。AD7746芯片相对于传统的微电容检测电路具有电路简单、电容测量准确、分辨率和线性度高等优点。此外,AD7746芯片还具有一个双线式I2C兼容的串行接口,方便与控制电路中的微控制器进行数据通信。
2.2 电容检测电路设计
电容检测电路采用AD7746芯片来设计,该芯片具有分辨率高、精度高、线性度好等诸多优点。它的电路原理图如图5所示,Cx为被测电容传感器,CP1和CP2为等效的寄生电容。
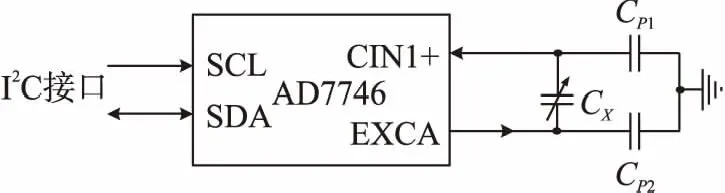
图5 电容式柔性触觉传感器电容检测电路
在图5中,微控制器STM32通过两个I/O口与AD7746芯片的I2C接口相连接,采用I/O口模拟I2C通信协议的方法与AD7746芯片进行通信。AD7746芯片对被测电容传感器采用浮动式的连接方式,即通过CDC(Capacitance-to-Digital Converter)架构测量被测电容Cx。在一定范围内,寄生电容CP1和CP2不会影响CDC的测量结果,有效地消除寄生电容对测量结果的影响[17]。
2.3 采集与处理系统软件设计
采集与处理系统的软件设计主要由控制电路的微控制器程序和PC机的上位机程序组成。
在获取传感器数据的过程中,为了减少采集数据频繁跳变而带来的误差,采用算术均值滤波算法。微控制器在完成10次采集测量后,将10次采集的电容传感单元的平均值作为最终的测量值,按照预定的通信协议将数据通过串口发送给上位机。微控制器的程序流程图如图6所示,系统初始化主要包括串口初始化、I2C初始化、AD7746初始化和中断初始化。

图6 微控制器程序流程图
上位机软件设计选用LabVIEW来进行设计。LabVIEW是一种采用数据流驱动方式的图形化编程语言,程序的执行效率非常高[18]。上位机程序结构框图如图7所示。

图7 上位机程序结构框图
3 触觉传感器标定装置设计
为了准确标定电容式柔性触觉传感器,本文根据杠杆平衡的原理,采用3D CAD设计软件SolidWorks 2014设计了小型的触觉传感器标定装置,其软件装配图如图8所示。选用铝合金、不锈钢和ABS塑料作为触觉传感器标定装置加工的原材料,通过对原材料进行加工和装配,得到传感器标定装置实物图如图9所示。

图8 传感器标定装置Solid Works装配图

图9 触觉传感器标定装置实物图
在图9中,指针和指示孔相互配合,用来指示触觉传感器标定装置是否平衡,配重主要用来调节标定装置平衡。挂钩和探针分别通过螺纹与横梁配合,可以通过互换探针和挂钩的位置,来调整标定的量程范围。
4 传感器实验测试与分析
将传感信号采集与处理系统、触觉传感器标定装置和安装有上位机软件的PC机搭建电容式柔性触觉传感器标定平台,如图10所示。

图10 触觉传感器标定平台实物图
4.1 触觉传感器的标定实验
按图10所示,使用触觉传感器标定装置对触觉传感器在0~20 N(0~800 kPa,电容极板有效面积为25 mm2)范围内进行连续加载和卸载标定实验,然后取其中3组标定数据进行分析,得到其滞后特性曲线如图11所示。

图11 电容式触觉传感器滞后性
从图11可知,3组标定数据中传感器的最大滞后误差为17.20%,滞后误差较大。其主要原因是:在标定过程中,电容传感器的介质在短时间内受到很大压力的作用,产生了塑性形变,在短时间内无法恢复至原来的状态引起的。另外,电容式触觉传感器在20 N压力的作用下,电容式触觉传感器极板间距变化量很大,不满足Δd/d0≪1。因此,图11中电容式触觉传感器的特性曲线不满足线性关系,符合第1节中的理论分析。
在应用中,为了减小滞后误差对测量结果的影响,采用Origin软件对触觉传感器3组正行程标定数据和3组反行程标定数据分别进行多项式拟合,寻找出传感器的最佳拟合曲线及其方程,如图12所示。

图12 电容式触觉传感器拟合曲线
图12中的(a)和(b)分别为电容式触觉传感器正行程和反行程的最佳多项式拟合曲线及其方程。它们的最大拟合误差Δemax分别为6.44%和5.91%。
在量程范围内,使用MATLAB软件对传感器正行程、反行程的拟合曲线方程分别求微分,得到电容式触觉传感器正行程、反行程的灵敏度范围分别为3.57% pF/N~14.59% pF/N和0.37% pF/N~20.53% pF/N。因此,该传感器的灵敏度范围为0.37% pF/N~20.53% pF/N。
为了检测电容式柔性触觉传感器的重复性,在0~20 N内对电容式柔性触觉传感器分别进行连续重复加载或卸载实验,取其中4次加载和卸载的实验数据分别绘制曲线图,如图13所示。
从图13可以看出,该电容式柔性触觉传感器具有较好的重复性,且卸载方向的重复性误差比加载方向的重复性误差要小,由传感器的重复性误差公式可以计算出传感器加载方向和卸载方向的重复性误差。传感器的重复性误差公式[19]为:
(5)
式中:α为置信系数,通常取α=2或3,在这里取α=2,置信概率为95.4%;σmax为各个校准点标准偏差中的最大值,本文采用极差法进行计算σmax;yF.S.为理论满量程输出值。
极差法计算标准偏差的公式为:
(6)
式中:Wn是极差,dn是极差系数,其值与测量次数n有关,实验的测量次数是4,通过查表可知,dn=2.24。采用重复性误差公式和极差公式对4次加载和卸载的测量数据进行分析计算可得,加载方向的重复性误差为eR=6.29%;卸载方向的重复性误差为eR=2.96%。因此,该传感器的重复性误差为eR=6.29%。

图13 电容式触觉传感器重复性
4.2 触觉传感器的压力检测实验
对电容式触觉传感器进行不同的压力检测实验,实验结果如表1所示。

表1 触觉压力实验结果及误差
从表1可知,在0~20 N(0~800 kPa)量程范围内触觉传感器对压力的检测结果与真实压力值之间最大相对误差小于10%,能够较好地实现对压力的检测。实验误差产生的主要原因包括:拟合曲线存在拟合误差;电容传感器的介质材料不能迅速回弹而引起的测量误差。
用探针对电容式触觉传感器施加或释放压力进行压力检测实验,其实验结果如图14所示。
图14中的实验结果表明,电容式触觉传感器可以实现对压力的检测。

图14 压力检测实验
5 结论
本文以PORON聚氨酯作为核心材料,设计了一种电容式柔性触觉传感器。阐述了柔性触觉传感器的结构原理、设计与制作方法,并根据其特点设计了相应的传感信号采集与处理系统、传感器标定装置,最后对传感器进行实验标定、测试和分析。实验结果表明,该电容式柔性触觉传感器及其信号采集与处理系统能够检测0~20 N的压力,拟合最大误差为6.44%,重复性误差为6.29%,能够实现触觉压力的检测,为在机器人指端实现触觉压力的检测提供一种参考。
