4自由度可调空间并联机构的位置分析
2019-09-18徐炳辉林光春陈世超
徐炳辉,林光春,黄 亮,陈世超
(四川大学 制造科学与工程学院,成都 610065)
0 引言
空间并联机构工作空间一般狭小,但可调的机构具有可以满足机构的不同工作环境,且其柔性较大,工作空间较一般机构大的优点,具有很大实用价值。在可调机构方面,机构学者取得了较多的成果,例如:在可调平面4杆机构综合方面,Bonell和Cofer等提出了一种复数方法,解决了该类机构的机构综合问题[1];周洪、邹慧君提出了一种利用机架杆方向结构误差优化综合可调节型曲柄摇杆连续轨迹生成机构的方法,基于改进的遗传算法得到了综合的全局最优解,并予以实例验证[2-3]。徐礼钜、张均富等运用病毒遗传算法对球面6杆StephensonⅢ机构轨迹进行优化综合[4];姚近等[5]对空间可调机构 RS-SRR-SS的刚体导引综合进行了研究,运用符号处理及矩阵运算等方法,建立了机构的运动学模型[6]。但是,一般可调的并联机构还很欠缺,基于矩阵运算的并联机构运动学分析建模复杂,加之可调杆件及运动副的加入,无疑更加深了运动学分析的难度。
本文基于符号算法对一种可调的空间4自由度并联机构进行位置分析,建立了机构的约束方程,消元后得到机构的单变元输入输出方程进而得到其解。
1 机构简介及坐标系建立
如图1所示为一种4自由度空间可调并联机构一种3维装配图。在静平台1中,周向运动滑块5可沿静平台1的环形轨道带动直线导轨3绕机座连接杆2周向运动,随着周向运动滑块5的定位而调节静平台3分支相互夹角,虎克副基座滑块6可沿着直线导轨3滑动而调节其到静平台中心的距离,运动滑块 5、胡克副基座滑块6可以通过对应螺栓实现定位;相似的,动平台是由3分支杆件11、12、13、芯轴10构成,该空间并联机构支链上端球面副可沿对应的分支杆件轨道滑动而调节球面副距离动平台芯轴10的距离,并被定位螺栓20固定,芯轴10与分支杆件11、12、13的配合截面为正十二边形,通过改变配合面来实现3个动平台分支相互夹角,同时用芯轴轴肩及定位锁紧螺母19定位。

1.机座(静平台) 2.机座连接杆 3.直线导轨 4.定位螺栓 5.周向运动滑块 6.虎克副机座滑块 7.形心杆 8.定位螺钉 9.球面副 10.芯轴 11.动平台分支杆件一 12.动平台分支杆件二 13.动平台分支杆件三 14.球碗滑块 15.杆件 16.胡克副 17.细杆件 18.形心定位螺栓 19.定位锁紧螺母 20.定位螺栓图1 4自由度空间可调并联机构3维装配图
如图2所示为一种4自由度空间可调并联机构简图。可调运动副可以根据机构工作环境或工况而调节构件的相对位置,在确定工作环境下由可调运动副连接的构件无相对运动。该机构是由可调静平台A1A2A3、可调动平台B1B2B3、支链AiliBi、及支链OhO0组成。其中可调静平台是由3个分支杆件VCi-rai-VPi连接而成;可调动平台由3个分支VCi-rbi-VPi连接而成,其中VCi、VPj为可调圆柱副、可调移动副(i=1,2,3、j=1,2,3,4,5,6);支链AiliBi的Ai端通过虎克副与可调静平台上可调移动副VPi固接,Bi端通过球面副与可调动平台上可调移动副VPm固接(m=4,5,6);支链OhO0下端与静平台垂直固接,上端O0用球面副与可调动平台连接,并设定O0与B1B2B3共面。这样组成静、动平台的分支可以分别调节相互夹角及Ai、Bi点到各自平台中心的距离。在确定工作环境及工况下,通过l1、l2、l3、h的长度变化驱动动平台在空间展现不同位姿。
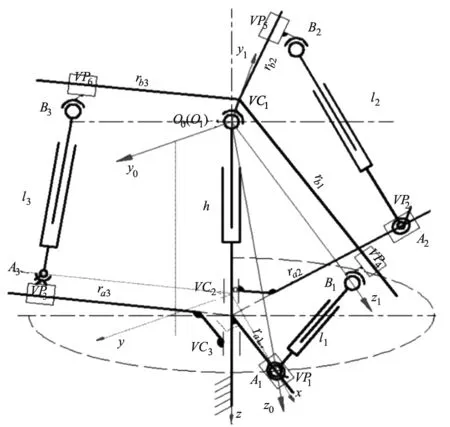
图2 4自由度空间可调空间机构简图
在并联机构位置分析建系过程中,通常选择静平台、动平台中心作为动坐标系原点,坐标系的x、y轴为平台所在平面。为了降低位置约束方程求解难度,按以下方法建立右手坐标系:以右手定则在静平台上建立静坐标系T-1,如图2所示,坐标系O-xyz原点为平面A1A2A3与OhO0的交点O上,z轴垂直于平面A1A2A3向下,x轴沿OA1;在动平台球面副球心O0(O1)建立跟随静平台结构参数调节的可调坐标系T0,坐标系O0-x0y0z0,z0轴沿O0A1(跟随A1移动),y0轴与y轴同向;在动平台球面副球心O0(O1)建立动坐标系T1,坐标系O1-x1y1z1,轴沿O0B1(跟随B1移动),轴向上垂直于B1B2B3平面。
2 位置分析通用求解模型
根据建立的坐标系,可以将Ai分别在静坐标系T-1、可调坐标系T0下表出,同时可将Bi在动坐标系T1下表出。通过坐标旋转变换,在T-1系下得到动平台上特征点坐标式,进而建立约束方程,求解可以得到动平台位姿,从而达到位置分析的目的。
2.1 约束方程建立
如图2所示,在可调静平台上,球面副中心Ai距离Oh为rai,分支VC2-ra2-VP2、VC3-ra3-VP3与VC1-ra1-VP1的夹角为Aθ2、Aθ3且Aθ2≠Aθ3;在可调动平台上,球面副中心Bi距离O0(O1)为rbi,VC2-rb2-VP2、VC3-rb3-VP3与VC1-rb1-VP1的夹角为Bθ2、Bθ3且Bθ2≠Bθ3;4 个驱动杆杆长分别为l1、l2、l3、h。
如图1所示,根据静坐标系T-1与可调坐标系T0的关系,得到其齐次变换矩阵M-1,0:
你知不知道什么方法会使你的孩子受到折磨?这个方法就是:让他要什么得到什么。这样,当他碰到钉子时,他将比得不到所希望的东西更感到痛苦。

(1)
在可调坐标系T0下,动平台的姿态角为(α′,β′,γ′),按z-x-z型回转变换矩阵得到T0与T1的变换矩阵R0,1,并规定α′∞[0,2π],β′∞[0,2π],γ′∞[0,2π],逆时针为正。
R0,1=

(2)
在动坐标系T1下,动平台特征点Bi的齐次坐标式为:
(3)
在可调坐标系T0下建立杆长约束方程:
(4)
在可调坐标系T0下,动平台特征点Bi的齐次坐标式为:
(5)
则在可调坐标系下,建立约束方程:
(6)
在式(6)中,当i=1时,
(7)
由于β′∞[0,π],得到:
(8)
令tan(α′/2)=x,tan(γ′/2)=y得到:
sinα′=2x/(1+x2) cosα′=(1-x2)/(1+x2)
sinγ′=2y/(1+y2) cosγ′=(1-y2)/(1+y2)
(9)
2.2 基于希尔维斯特(Sylvester)位置方程消元
对于多元非线性方程组,可以在某具体数值处牛顿展开,并迭代得到该值附近的数值解。此方法的求解速度慢,迭代初值难以确定,得不到方程组对应的解析解。而将多变元的非线性方程消元为单变元的多项式方程可以得到方程的解析解,其求解速度快且准确。希尔维斯特(Sylvester)消元是一种经典消元方法,在理论上可以对任意多变元多项式方程消元求解,对于少变元、次数较低的多项式方程求解具有明显优势。
所以,将式(8)、式(9)分别代入式(6)中可消去 ,得到关于x、y的多项式方程:
(10)
按此思想,先确定此多变元多项式方程的消去变元为x,令其希尔维斯特结式为0,得到单变元y的多项式方程;其次求解此单元多项式方程,最后将所得解回代,得到各变元解析解。
将式(10)改写成矩阵形式:
(11)
式(11)有非零解的条件是当且仅当其系数矩阵行列式等于0,可以得到其结式,消去变量x,得到:
ti=f(lj,h,raj,rbj,Aθ2,Aθ3,Bθ2,Bθ3),(j= 1,2,3)
(12)
式中系数是机构结构、输入杆长以及各角度的函数。通过Matlab符号运算可以得到系数的符号表达式。求解式(12)即可得到y的8组解,接着依次由式(10)、式(9)、式(7) 得到可调坐标系T0下的姿态角α′,β′,γ′再由式(1)可在静坐标系T-1得到动平台姿态角,最后由式(5)得到动平台位置。由此该机构空间姿态及位置确定,其齐次变换矩阵为:
3 位置分析实例求解
为了验算该可调并联机构的通用位置分析模型,现给出一种具有代表性的支链布局形式——支链围绕OO0均布求解实例。将求其位置解的过程进行验算,具体如下。
如图3所示为该可调并联机构的一种构型简图,其驱动支链绕OO0均布,取其结构参数rai=ra=50,rbi=rb=30,Aθ3=Bθ2= 120°,Aθ2=Bθ3= 240°,任取驱动杆杆长l1=47,l2=57,l3=35及动平台位置(0,0,-35)T得到y的8组解,进而得到可调坐标系T0下的姿态角α′,β′,γ′的值,结果如表1所示。
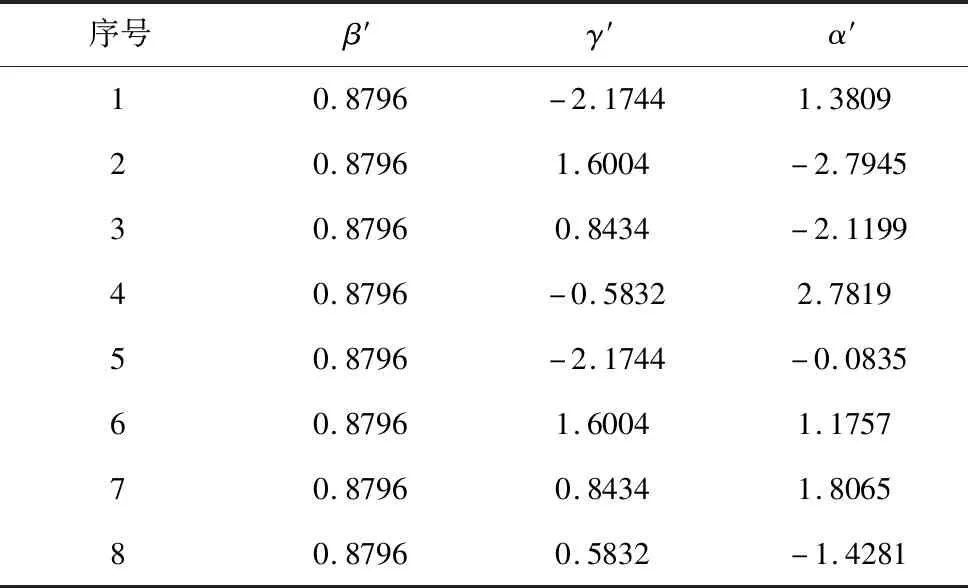
序号β′γ′α′10.8796-2.17441.380920.87961.6004-2.794530.87960.8434-2.119940.8796-0.58322.781950.8796-2.1744-0.083560.87961.60041.175770.87960.84341.806580.87960.5832-1.4281
再由式(1)可以得到静坐标系T-1下动平台姿态角α,β,γ的值,结果如表2所示。

表2 静坐标系下姿态角的解值
最终,由式(5)得到动平台位置:
为了检验该结果正确与否,将此可调坐标系T0下的Bi的结果带入式(5)中得到动坐标系T1下的Bi值,之后我们利用静坐标系T-1下的姿态角,按照z-x-z型回转变换矩阵很容易得到T1和T-1的齐次变换矩阵M-1,1的值,接下来利用公式(13)得到静坐标系T-1下Bi的坐标。同理可得静坐标系T-1下的Ai的坐标最后将其代入式(14)中,经验算得到:l1=47,l2=57,l3=35,与题设相符。故该求解模型正确。
(13)
(14)
4 结论
(1)提出一种基于可调运动副的可调4自由度空间并联机构,该机构可以针对复杂环境,多工况实现结构参数可调,并构建此可调机构的位置分析通用模型,推导出其8次的输入输出方程,可以快速得到其位置分析的解析解。
(2)通过引入可调坐标系,使得位置分析约束方程耦合度降低,同时降低了输入输出方程的次数,减少了引入的增根数。
(3)采用 Sylvester 消元法对机构的约束方程组进行消元,得到了位姿的解析解,降低了方程的求解难度。并用一个实例验算了位置分析模型,说明了该位置分析的连贯合理性与正确性。
DOI:10.1115/1.3624995.