打磨机器人不同位姿下的刚度特性研究*
2019-09-18吴超群尹绪伟
吴超群,尹绪伟
(武汉理工大学 机电工程学院,武汉 430070)
0 引言
大多数机器人应用在制造业中,尤其是在汽车制造业中,如毛坯加工(冲压、压铸、锻造等)、机械加工(机器人打磨,切削,钻孔等)、焊接、热处理、表面涂覆、上下料、装配、检测及仓库码垛等作业中。随着工业机器人向更深更广方向的发展以及机器人智能化水平的提高,其应用范围不断扩大,如采矿机器人、建筑业机器人、维修机器人,除此之外,在国防军事、医疗卫生、生活服务等领域的应用也越来越多[1]。在加工领域,关节型机器人与传统CNC机床一样具有多轴功能。相比于CNC机床,机器人加工系统更灵活,能适用于各种场合。但串联机器人与传统CNC机床相比刚度低,加工精度和质量得不到保证,限制了其在加工过程中的应用。目前针对机器人在实际加工过程中刚度提高的研究较少,很少有具体经验公式用于机器人加工过程中的刚度性能评价,如何优化机器人的加工刚度具有重要的研究意义。在机器人连杆刚性的假定下,其末端操作刚度主要与机器人关节刚度、机器人姿态有关,文献[2]指出机器人刚度与机器人的姿态有关,在机器人众多姿态中必定存在一个最优姿态,该姿态下刚度最优。本文首次考虑打磨机器人实际加工过程中与工件之间的相对位置关系,研究机器人不同位姿对其操作刚度的影响,发现机器人不同位姿对机器人操作刚度具有较大影响,提出一种刚度性能变形评价指标,通过优化该指标得到了本打磨工况下的最优加工位姿。
1 打磨机器人系统介绍
本课题组以中介机匣为研究对象,成功开发试制出一套钛合金机器人自动打磨系统。系统主要包括6自由度工业机器人、打磨工件钛合金机匣、旋转加工平台、排屑机以及底座等各部分,系统部分组成如图1所示。该系统中机器人固定于底座上,工件固定在旋转工作台上,采用机器人抓取刀具对工件进行打磨。
6自由度串联工业机器人与传统机床相比存在结构弱刚性问题[3],在加工过程中影响工件的加工质量。各位学者针对提高机器人加工刚度做了很多研究[4-7],影响机器人末端加工刚度的因素包括机器人关节刚度、连杆刚度以及机器人位姿。本文对机器人的加工位姿进行优化,以提高机器人末端加工刚度,增强加工稳定性,改善加工质量。

图1 钛合金机器人打磨系统
2 机器人静刚度模型建立
2.1 IRB6700机器人连杆坐标系的建立
IRB6700为6自由度串联机器人,用D-H方法[8]建立机器人的连杆坐标系,如图2所示。
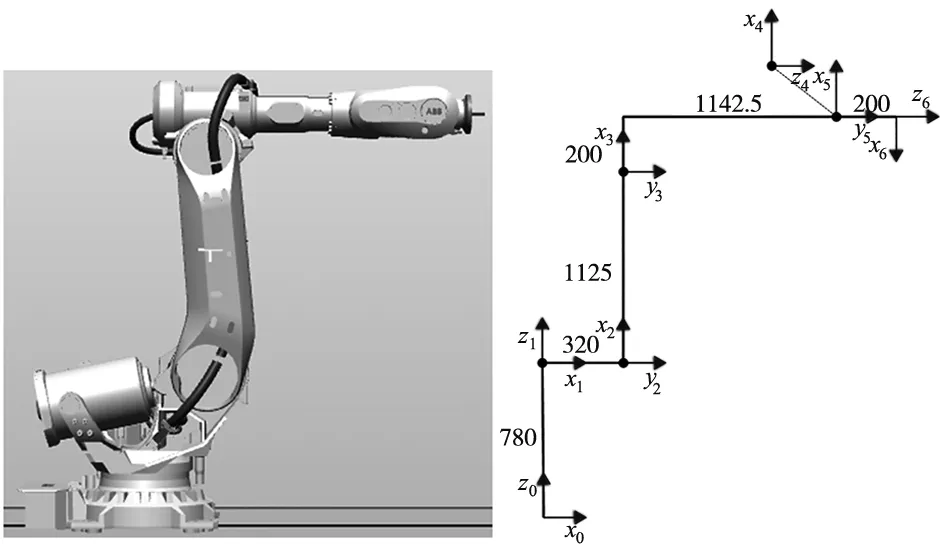
图2 IRB6700机器人连杆坐标系
下载该型号机器人的三维模型,在三维软件Solidworks中打开,测得该型号机器人各连杆及关节参数,如表1所示。

表1 IRB6700连杆参数
2.2 IRB6700机器人运动学方程的建立
由D-H方法规定好机器人的连杆坐标系之后,可根据坐标前置方法[9]得到机器人从坐标系{i-1}到坐标系{i}之间的变换矩阵。具体步骤如下
(1)绕Xi-1轴旋转角度αi-1;
(2)沿Xi-1轴移动距离ai-1;
(3)绕Zi轴旋转角度θi;
(4)沿Zi轴移动距离di。
(1)
得到连杆坐标系之间的变换矩阵:
(2)
将机器人各连杆变换矩阵依次相乘,得到末端手腕坐标系相对于基坐标系的位姿矩阵:
(3)
用雅克比矩阵来描述机器人关节速度与空间速度之间的关系,在求解机器人雅克比矩阵的时候一般采用矢量积法或者微分变换法,本文采用微分变换方法[10]来求解机器人的雅克比矩阵。
坐标系T6在位置和方向上的微分变化以6个关节坐标的函数写成一个6×6的矩阵:
(4)
其中雅克比矩阵的第J列元素如下,
(5)
对于机器人IRB6700,各关节均为旋转关节,有
δi=0i+0j+k
(6)

(7)
2.3 IRB6700机器人静刚度模型的建立
对于本文6自由度串联机器人,臂杆刚度较大而关节刚度较小,由关节柔度造成的机器人末端变形往往远大于由臂杆柔度造成的机器人末端的变形[11]。因此在忽略机器人臂杆挠度的前提下,考虑机器人关节挠度建立该型号机器人的静刚度模型,见式(8)。
F=J-TKqJ-1X
(8)
对式(8)变形可得到机器人的柔度矩阵,描述机器人末端变形与末端受力之间的关系(9)。式中的关节刚度矩阵,我们参照文献[12]通过辨识实验得到的机器人各个关节刚度。
X=JKq-1JTF
(9)
3 打磨机器人位姿优化模型的建立
3.1 打磨机器人加工位姿的选取
在进行机器人打磨轨迹规划与位姿选取时,首先对打磨系统建立各个坐标系。在机器人基座底面中心建立基坐标系,也是大地坐标系,作为整个系统的参考坐标系,其中Z轴方向沿轴1方向竖直向上,X轴方向在水平面上由轴1指向轴2,Y轴方向由右手定则确定。在机器人末端电主轴夹持的打磨磨头上建立工具坐标系,其中Z轴方向沿机器人第6轴轴线指向外侧,X轴方向沿电主轴轴向方向指向内侧,Y轴方向根据右手定则确定。在旋转工作台上表面圆弧中心建立工件坐标系,X、Y、Z方向与基坐标系中的方向一致。
对于本机器人打磨系统,在打磨机匣上圆弧表面时,可选取多个位姿点进行打磨。在机匣上圆弧表面沿周向等角度选取42个打磨姿态点,即每隔8.37°选择一个打磨姿态点,位姿点编号1~42。打磨磨头在每个位姿点的方向如下:X轴方向沿工件机匣径向指向外侧,Z轴方向沿机匣轴线竖直向下,Y轴方向为打磨磨头的进给方向,与工件的外圆弧相切,如图3所示。

图3 机器人位姿点
确定了机器人的打磨位姿点后,需要考察机器人在各个位姿点的到达能力。针对该机匣上表面圆弧的打磨,将相应的工件模型导入到软件Robotstudio中,根据相应装配关系进行位置调整。调整好之后,对各个目标点进行位姿和轨迹规划。规划好之后对机器人进行试教操作,检查机器人在各个位姿点的到达能力。得到机器人的可达任务空间如图4所示,其中白色轨迹为机器人的可到达任务空间,包含目标点10~35;红色目标点为机器人的不可到达空间,包括目标点1~9和目标点36~43。

图4 机器人可达任务空间
在可达工作空间内,试教机器人按照给定的方向到达各个位姿点,从各个点的参数配置中获取机器人轴1~轴6的角度。依次试教机器人到达各个点,得到机器人各个位姿点对应的关节角度,如表2所示。
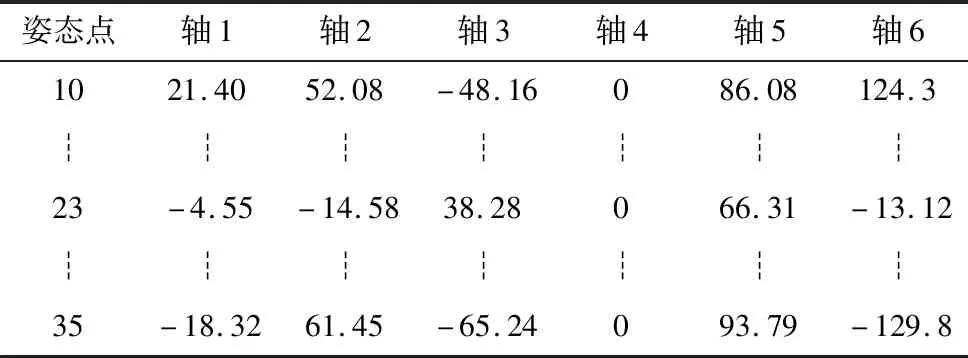
表2 机器人各位姿点关节角度
比较建立的D-H坐标系与Robotstudio中的机器人坐标系,发现关节2与关节6初始坐标系关节角的规定不一致。将Robotstudio中读取的关节2角度减去90°,关节6加上180°,即得到了建立的D-H坐标系中机器人位于各位姿点时各关节的角度。
3.2 打磨机器人IRB6700位姿优化模型建立
机器人在各个位姿点进行加工时,根据式(8)可知机器人末端的操作刚度与机器人的雅克比矩阵J有关系,即与机器人的位姿有关系。比较机器人在各个位姿点的刚度情况,以机器人末端操作刚度为优化目标,位姿点为优化变量,得到机器人的最优加工位姿点。

(10)
其中,Xd为平移变形,Xδ为旋转变形,Ctt为平移柔度矩阵,Ctr为耦合柔度矩阵,Crr旋转柔度矩阵,F为力矢量,MF为力矩矢量。文献[13]表示在机器人末端在受到同等数量级的力及力矩矢量作用时,由力产生的作用效果远大于由力矩产生的作用效果。因此在忽略机器人末端力矩的情况下,考虑机器人末端受力对机器人加工刚度的影响,式(10)可简化为:
(11)
根据式(11),定义刚度性能变形指数ΔX:
ΔX=‖CttF‖
(12)
机器人末端受到同等操作力的情况下,ΔX越小代表机器人操作刚度性能越好。综上所述,建立机器人末端刚度位姿优化模型:
minΔXi(i=10、11、…、35)
(13)
本项目中选取的电主轴功率为3.5kW,质量为20kg,由其参数,得到机器人末端受力情况。

(14)
将表2及式(14)的数据带入优化模型式(13)中可以得到机器人最优加工位姿。
4 仿真结果分析
依据建立的优化模型,在MATLAB软件中编程,带入相关数据进行仿真计算,得到机器人在不同位姿点下的刚度性能变形指数变化情况如图5所示。

图5 IRB6700末端ΔX变化情况
从图5可知,机器人刚度性能变形指数随着位姿点的变化而变化,变形最小位置对应着机器人刚度最优位置。该指数最大为0.403mm,最小为0.301mm,最大变形差达到0.101mm,说明位姿点的变化对机器人操作刚度有较大影响,可通过位姿点的优化对加工刚度进行提高。
对于本打磨工况,加工表面法线方向的变形(Z方向)对加工精度和质量有较大影响。考虑机器人末端X、Y、Z方向的变形随位姿点的变化情况,如图6 所示。
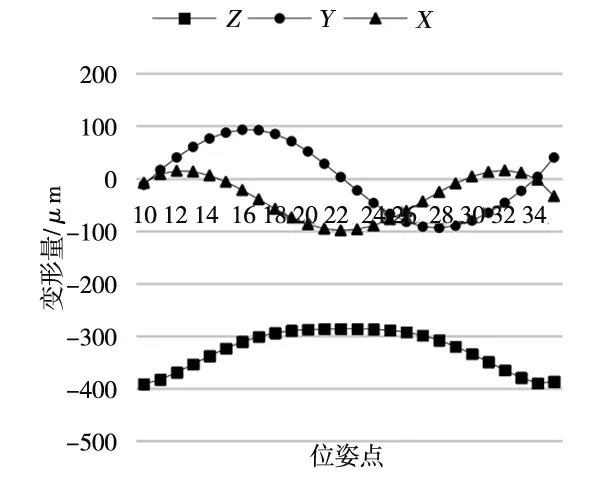
图6 IRB6700末端X、Y、Z方向变形大小
不考虑机器人的变形方向,将机器人各个方向的变形量取绝对值进行比较,结果如图7所示。

图7 IRB6700末端X、Y、Z方向变形绝对值大小
比较发现,机器人沿X、Y、Z方向都有不同程度的变形,说明机器人各方向的受力与各方向的变形存在耦合情况。查看机器人变形量的大小,发现机器人沿Z轴方向的变形远远大于机器人沿X、Y轴方向的变形,某些点位的变形量相差了1~2个单位的数量级,这与机器人末端只承受Z方向的重力相吻合。且机器人变形的方向与机器人受力的方向一致。因此考虑机器人在Z轴方向的刚度与变形情况,发现与刚度性能变形指数ΔX变化一致。比较上图发现从姿态点10到姿态点35,变形量呈现先下降后上升的趋势,说明机器人在Z轴方向的刚度特性先增大后减小。机器人在Z方向最大变形量为0.391mm,最小变形量为0.286mm,最大变形差为0.105mm。最小变形点位对应的是位姿点22,该位姿点机器人末端操作刚度最优。实际打磨切削过程中,可通过旋转工作台将打磨工件旋转至相应位置处,便于机器人在选定位姿处对工件进行加工。
5 结论
针对机器人实际位姿难以测量的问题,在Robotstudio中装配好机器人与工件的位置,调整好机器人在各打磨工位下的位姿,读取其在各打磨点下各关节角读数,得到了机器人准确的位姿。建立了针对机器人操作刚度提升的位姿优化模型,在Matlab中仿真计算得到了本打磨工况下的最优加工位姿。
通过研究发现,机器人位姿对机器人操作刚度具有较大影响。实际加工过程中,针对机器人和工件之间位置可改变的情况,可事先布置好机器人与工作台之间的相对位置,或者在加工过程中改变被加工工件的位置,通过位姿优化提高机器人操作刚度。