基于光流法与图像纹理特征的鱼群摄食行为检测
2019-09-10陈志鹏陈明
陈志鹏 陈明








摘要:【目的】借助計算机视觉技术检测鱼群的摄食行为变化,为实现水产养殖中的精准投喂提供参考。【方法】以彩鲤为试验对象,首先对鱼群摄食过程的图像进行中值滤波、直方图均衡化预处理,提取目标鱼群前景图像,然后通过灰度共生矩阵计算鱼群的纹理特征,利用Lucas-Kanade光流法计算鱼群的运动方向矢量,并采用方向熵表征鱼群运动的混乱程度,最后利用支持向量机算法对鱼群摄食图像进行训练检测。【结果】图像预处理方法减少了水质浑浊对鱼群图像检测的影响;基于光流法与图像纹理特征定量分析鱼群的摄食过程变化,避免了水面抖动及水花等复杂因素的影响。该方法的检测准确率达97.0%,基本上能检测识别出所有的鱼群摄食状态与正常游动状态图像;与基于形状和纹理特征的检测方法相比,其检测精度提高4.5%(绝对值),可更好地满足池塘养殖环境下的鱼群摄食行为检测工作需要。【建议】在今后的研究中将获取更多鱼群在不同环境下的摄食图像,以提高模型泛化性,同时对鱼群不同摄食阶段特征参数设定阈值告警,以便更好地应用于智能饵料投喂设备研究。
关键词: 图像纹理;光流法;鱼群摄食行为;支持向量机
中图分类号: S951.2 文献标志码: A 文章编号:2095-1191(2019)05-1141-08
Abstract:【Objective】Using computer vision technology to detect changes in feeding behavior of shoal could provide a reference for accurate feeding in aquaculture. 【Method】Taking Cyprinus carpio var. color as an experimental object, median filtering and histogram equalization pre-processing were used to extract the foreground image of the target shoal, and the texture features of the shoal were calculated by the gray level co-occurrence matrix. The direction vector of the shoal was calculated by Lucas-Kanade optical flow method, then used direction entropy to characterize the chaos of shoal movement. Finally, the support vector machine algorithm was used to train and test the shoal feeding image. 【Result】In this paper, the image preprocessing method was used to reduce the influence of water turbidity on fish image detection. The optical flow method and image texture features quantitatively analyzed the changes in the feeding process of the shoal, avoiding the influence of complex factors such as water surface jitter and water splash. The experimental results showed that the detection accuracy of this method reached 97.0%, and it could basically detect the images of all the shoal feeding state and normal swimming state. Compared with the detection methods based on shape and texture features, the detection accuracy was improved by 4.5%(absolute value), this method could better solve the problem of shoal feeding behavior detection in pond culture environment. 【Suggestion】In the subsequent study, more shoal feeding image in di-fferent environments will be used to improve the generalization of the model. In addition, threshold alarms will be set for the features parameters of different feeding stages of the fish to better apply to the research of intelligent bait feeding equipment.
Key words: image texture; optical flow methods; shoal feeding behavior; support vector machine
0 引言
【研究意义】近年来,随着我国水产养殖技术的不断发展,工厂规模化池塘渔业养殖产量不断提高,水产养殖中鱼群投喂量的精准控制问题受到越来越多的重视。目前鱼群投喂仍以人工观察投喂或机器投喂为主,无法根据鱼群的实际摄食行为变化进行精准控制,从而造成饲养成本上升及水质环境恶化,影响鱼群的健康生长(周应祺等,2013;胡金有等,2015),同时人工投喂的人力成本和技术成本会制约渔业生产效率。此外,鱼群的摄食欲望变化会直接影响鱼群的摄食行为变化。因此,通过研究分析鱼群的摄食行为指导鱼群精准投喂,有利于提高水产养殖效率。计算机视觉技术作为一种高精度、无接触技术,在鱼类检测分析方面已成为重要的研究方向(段延娥等,2015)。利用计算机视觉技术可实时观测鱼群的摄食状态,能够精准判断投饵时间,从而控制饵料的投放,有效提高饵料利用率。由于鱼群在不同生长阶段的摄食活动强度差异明显(Delcourt et al.,2013;Delphine and Dominique,2014;Hu et al.,2016),因此利用计算机视觉技术检测出鱼群摄食状态,从而量化分析鱼群摄食过程,对于鱼群饵料投放问题的研究具有重要意义。【前人研究进展】目前将计算机视觉技术应用于鱼类行为学的研究已有许多成果。Ma等(2010)通过计算机视觉系统研究分析鱼的运动轨迹变化情况来实时监测水质,但该方法检测精度不高且对试验条件有一定要求。于欣等(2014)采用鱼群运动光流法和运动特征统计方法得到鱼群运动矢量特征的概率分布情況,以此用来检测鱼群的异常行为,获得较高的检测精度。Liu等(2014)通过帧间差分法量化分析鱼群的摄食行为,可免去对个体的跟踪,但忽略鱼群摄食引起的水花及反光等因素影响,使得检测精度不足且计算复杂。赵建等(2016)提出一种改进动能模型量化鱼群摄食变化过程,结合Lucas-Kanade光流法及信息熵提取水面反光区域变化特征进行摄食评估,避免了对鱼群前景提取,但对试验对象规模有一定要求。陈彩文等(2017)采用鱼群摄食图像纹理变化表征鱼群摄食过程强度的变化,有效避免了鱼群摄食过程中引起的水面反光等因素影响,检测方法较简单,但检测精度有待提高。【本研究切入点】目前的研究大多是基于循环水养殖系统下的鱼群进行实验分析,对于规模化的池塘养殖研究较少。由于池塘养殖环境下的水质相对浑浊,跟踪提取鱼群目标位置的过程较困难且鱼群存在密度较大、相互遮挡现象,使得量化分析鱼群摄食过程十分困难(王勇平等,2015;Pautsina et al.,2015;Zhao et al.,2016)。鱼群的摄食过程主要是运动速度和运动方向突变的过程,采用光流法能够通过检测图像像素点随着帧数变化情况提取目标的运动速度和方向矢量特征,进而检测出图像中的鱼群运动目标,并且避免对鱼群的跟踪(Andrade et al.,2005)。此外,鱼群图像纹理会随着鱼群摄食行为的变化而改变。鱼群摄食过程环境复杂多变且运动过程混乱,若仅采用光流法获取鱼群摄食过程中的运动方向特征,容易对低密度鱼群图像产生误判;仅采用纹理信息,则在检测区域鱼群数量过多且正常游动情况下同样产生误判。【拟解决的关键问题】以池塘养殖彩鲤为试验对象,结合养殖鱼群摄食特性,提取出鱼群图像纹理特征和Lucas-Kanade光流方向熵特征,基于支持向量机(Support vector machine,SVM)对鱼群摄食行为进行检测,为解决鱼群精准投喂问题和实现智能化农业发展提供参考依据。
1 数据来源与研究方法
1. 1 试验材料
试验对象为上海海洋大学养殖池塘观赏彩鲤。该鱼种生长较快,养殖效益高,此外鱼体体色艳丽,便于图像采集设备拍摄。试验鱼体长15~25 cm,饲养于深约1.0 m的池塘中,水体温度保持在15 ℃左右。试验时间为2018年5—8月。试验前彩鲤已经于养殖池塘中生活数月并充分适应环境。
1. 2 鱼群图像采集
试验鱼群图像数据采集系统如图1所示,将一台普通摄像机安装固定在距离养殖池塘边缘垂直高1.5 m的位置进行拍摄,保证能采集较高质量的图像数据,通过调整镜头方向使其拍摄到池塘部分区域并确保拍摄环境光照均匀。采集的视频图像为位深24 bit的RGB图像,图像分辨率为640×368像素,帧率为30帧/s。拍摄的视频图像包含鱼群正常游动阶段、投喂摄食阶段及摄食后游动阶段。试验过程中每隔1 s截取一帧进行计算,通过减少计算帧数来降低试验所需计算时间,提高检测效率和实时性。借助MATLAB R2013a图像处理软件在鱼群摄食过程视频中采集共700帧图像,并进行检测分析,算法试验平台为VS 2012和OpenCV 3.4.2。
1. 3 鱼群摄食行为分析及特征提取研究方法
鱼群在正常游动阶段一般会集群游动,游动方式较统一,而在投喂摄食阶段,鱼群会迅速游到饵料投放位置抢食,运动方向较混乱,并引起水面波纹抖动及反光现象,图像纹理也会相应改变。同时受光照、鱼群间遮挡及水质环境等影响,采用传统方法解决鱼群分割与识别的问题较复杂。本研究将鱼群摄食过程中引起的水面波纹抖动和溅起的水花也作为鱼群图像纹理变化因素,以整个鱼群的图像特征作为切入点,对鱼群的摄食行为进行研究。结果发现,随着鱼群摄食活动及摄食鱼群数量的变化,图像纹理也会发生不同程度变化。图2为鱼群摄食前后的彩色图片和灰度图片。
试验流程如图3所示,首先采用中值滤波方法去除图像噪声,对采集到的图像进行直方图均衡化处理,以增强在相对浑浊的水质背景下鱼群对比度。然后利用自适应高斯背景建模不断更新背景图像;再通过背景减除提取鱼群前景图像并灰度化,利用灰度共生矩阵提取出鱼群摄食图像的纹理特征;同时,通过Lucas-Kanade光流法计算获取的前景鱼群目标运动方向矢量,建立方向直方图统计每帧图像的方向矢量概率分布,据此计算鱼群运动方向熵并用来表示每帧图像鱼群运动方向的混乱程度,从而估计出鱼群摄食的混乱程度。最后将提取的图像纹理特征及光流方向熵特征采用SVM进行训练并检测鱼群的摄食状态变化。
2 结果与分析
2. 1 基于灰度共生矩阵的鱼群图像纹理特征提取
纹理是反映物体表面随时间变化的空间结构组成特征,如光滑度和粗糙度等,主要体现在图像像素及其邻域的灰度分布(刘丽和匡纲要,2009;Sadoul et al.,2014;乔峰等,2015)。通常采用灰度共生矩阵的统计特征来描述图像的纹理分布信息。纹理是在空间位置上的灰度分布而形成,因此,在图像中的任意两个像素间均会存在一定的灰度关系,而采用灰度共生矩阵对灰度关系进行统计,其描述了灰度图像的方向、相邻间隔和变化幅度等综合信息。本研究选取能量、逆差矩、对比度和熵4个特征来描述图像的鱼群纹理信息。
根据上述公式可知,灰度共生矩阵随着不同方向、灰度等级及像素距离的变化会得到不同的图像纹理信息。根据陈彩文等(2017)的研究结果,在0°、45°、90°和135°方向上的纹理信息所反映的特征变化趋势基本相同。因此本研究选取像素方向为0°,灰度等级设为8级,像素距离设为10个像素,依此计算鱼群摄食图像的4个纹理特征参数量化鱼群摄食变化过程。
2. 2 基于光流法的鱼群运动方向熵特征提取
本研究采用Lucas-Kanade光流算法(Lucas and Kanade,1981;杜鉴豪和许力,2011)提取鱼群的运动矢量特征,使空间窗口内的光流数量保持恒定,能够根据视频图像中的运动目标数量及大小自动建立光流计算窗口大小,计算过程中只需要跟踪少量的运动矢量特征点,计算量较少且应用场景广泛。通过光流法对每一帧图像的鱼群运动方向矢量进行统计,所得到的鱼群主要运动趋势即可代表当前帧鱼群的运动趋势;通过建立方向直方图统计鱼群的运动方向矢量,方向直方图是按照每45°为一个区间建立方向直方图条,即360°方向共分为8个区间范围。直方图(h)的定义如下:
式中,p表示运动矢量方向的概率分布,x表示图像帧数。熵值较小,则认为鱼群运动方向趋于一致,鱼群处于正常游动状态;熵值较大,则认为鱼群运动混乱,鱼群处于摄食状态。
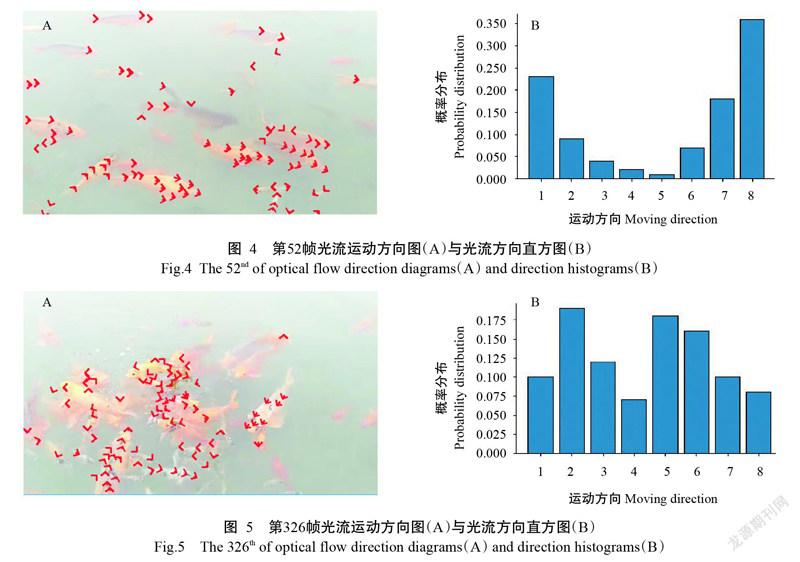
在试验过程中,首先读取鱼群摄食视频帧,并获取鱼群前景图像。其次,利用Lucas-Kanade光流法选取每个图像帧中的光流场运动矢量特征点进行计算,并将所得到的光流矢量极坐标化;通过公式(1)统计每个方向区间的光流矢量数;通过公式(2)计算光流矢量概率分布来建立方向直方图,则该直方图即可表示该帧图像中鱼群的运动方向趋势;通过公式(3)计算得出该帧图像的运动方向熵。为了更直观、清晰地查看试验效果,将每帧图像选取的光流矢量点用红色箭头表示。如图4所示,第52帧图像为鱼群正常游动图像,鱼群运动方向主要以0°方向的上下45°范围内为主,对应其运动方向直方图的第1和第8个运动方向区间概率分布值相对较高,表明该方向区间即为鱼群主要游动方向。如图5所示,第326帧图像为鱼群处于摄食状态的图像,此时鱼群运动方向比较混乱,对应其运动方向直方图所有区间上的概率分布值相对比较均衡。
2. 3 特征参数曲线变化分析
根据上述方法获得的图像纹理特征及光流方向熵特征曲线如图6和图7所示,能量、逆差矩、对比度和熵4个图像纹理特征和方向熵均能较好地描述鱼群的摄食行为变化过程。在1~100帧时,鱼群处于正常的游动状态,由图6-A和图6-B可看出,能量和逆差矩特征值有小幅减少,但总体波动不大;由图6-C和图6-D可看出,对比度和熵特征值有小幅增加但总体波动同样不大;由图7可看出,鱼群的运动方向熵特征值波动基本不变。在100~600帧时,鱼群处于摄食状态,此时鱼群开始四处游动抢食,鱼群个体运动方向十分混乱;由图6-A和图6-B可看出,能量和逆差矩特征值在摄食初期突然大幅度减少,且在整个摄食期间有较大波动;而由图6-C和图6-D可看出,对比度和熵特征值在摄食初期突然大幅增加且在整个摄食期间同样有较大波动;由图7可看出,鱼群的运动方向熵特征值同样突然变大且在整个摄食期間波动幅度较大。在600~700帧时,鱼群基本摄食完毕并逐渐返回到正常游动状态,仅有少量鱼群抢食残饵,由图6-A和图6-B可看出,能量和逆差矩特征值又逐渐增加到摄食前的水平且有小幅突变,这也与少量鱼群抢食残饵有关;而由图6-C和图6-D可看出,对比度和熵特征值逐渐减少并基本恢复到摄食前的水平值;由图7可看出,鱼群的运动方向熵特征值也在逐渐减少并有小幅波动。
2. 4 检测方法的比较分析
2. 4. 1 基于SVM的鱼群摄食行为检测分析 为了能准确检测出鱼群的摄食状态图像,本研究选取SVM用于训练所提取出的能量、逆差矩、对比度和熵4个图像纹理特征和方向熵特征参数。SVM采用结构风险最小化原则,具有良好的学习泛化能力,可很好地克服神经网络技术中所面临的训练速度慢、学习精度低等问题,在解决分类识别问题中应用广泛(张学工,2000;陈彩文等,2018)。在SVM训练过程中,其准确率与核函数的选取具有密切关系。大量的研究结果均表明径向基(Radial basis function,RBF)核函数可较好地解决非线性映射分类问题。因此本研究选用径向基核函数,即
K(x,y)=exp[-x-y22σ2]
在选取训练样本集过程中,随机选择700帧样本集中的500帧图片作为训练集,剩下的200帧图片作为测试集,利用SVM开始进行训练和测试。为避免特征数值变化范围过大,也为使训练参数优化时能以较快的速度收敛,本研究将所提取的4个纹理特征参数及方向熵特征参数进行归一化处理。由于惩罚参数c和核函数参数g影响SVM模型的训练结果,采用libSVM软件包快速选择最优核函数参数,其中包含较多默认参数,可有效减少分类时间。经过多次参数调优试验,当c=12,g=0.4472时,可得到最佳检测效果。
2. 4. 2 基于形状与纹理特征的鱼类摄食状态检测方法 为验证本研究中方法的有效性,通过与郭强等(2018)的检测方法进行比较。该方法根据鱼群摄食过程中的整体形状参数变化特点及图像纹理熵值变化,采用BP神经网络模型训练后用于检测鱼群摄食状态,取得了良好的检测效果。利用该方法计算本研究所获得出的鱼群摄食过程中的形状参数变化曲线如图8所示,形状参数在100~600帧时变化趋势比较明显,该方法在面对养殖池水质浑浊且视频监测范围有限的情况下,仅提取了鱼群图像形状及纹理静态特征,另外鱼群运动过程中的形状参数多变且难以准确提取,对于试验结果会有一定影响。
2. 4. 3 检测结果对比分析 将两种方法进行训练测试后,所得结果如表1所示,基于形状和纹理检测方法的准确率为92.5%,低于基于光流法与图像纹理特征的检测方法,其原因是由于前者仅考虑鱼群图像静态特征变化信息,对于鱼群聚集而未摄食的状态易产生误判,同时对于浑浊水质环境下的鱼群形状特征难以准确提取。而本研究虽然检测所需时间较长,达7.41 s,但准确率更高,达97.0%,且在实际养殖环境下,检测时间对结果产生的影响可忽略。本研究在面对浑浊水质环境下,通过对鱼群摄食行为静态纹理特征与光流动态特征结合进行分析,不需要考虑由鱼群抢食引起的水面波动等复杂因素影响,对于鱼群的摄食行为检测具有较高的准确率。因此本研究可应用于鱼群的摄食行为分析与精准投喂研究。
3 讨论
本研究通过结合图像的静态纹理特征和鱼群运动的动态光流方向熵特征,对鱼群摄食过程参数变化进行定量分析研究,并有效检测出鱼群的摄食状态变化,避免了水面抖动及水花等复杂因素的影响,对于研究水质相对浑浊的养殖环境下鱼群摄食行为分析与精准投喂问题具有一定的指导意义。根据鱼群的摄食行为或与摄食相关的因素变化建立投喂策略模型,可有效实现饲料投喂量及投喂时间的精准控制。邢克智等(2013)结合养殖对象生长预测模型,建立了不同生长阶段中投喂率及投喂量的变化模型,并开发了基于专家知识和模型的水产品精细养殖管理决策系统。Liu等(2014)结合投喂前后的水体溶解氧变化情况,建立以鱼群聚集指数和争抢强度变化参数为输入的人工神经网络模型,从而决定投喂策略,取得了良好的试验效果。尽管上述方法都取得了不错的试验效果,但均为基于室内小范围或循环水养殖系统(Recirculating aquaculture system,RAS)下的研究,针对粗放型池塘养殖环境下的鱼群摄食行为量化效果还需进一步验证。
虽然本研究检测效果良好,但在某些方面还需要改进,如采集的鱼群摄食视频分辨率不高,成像质量相对较低,同时鱼群的摄食状态图像以人工分类为主,对于模型训练检测结果可能会有一定影响。此外,采用SVM训练模型的样本类型较少,模型泛化能力不足。而试验对象的游动习性及养殖密度是本研究检测率较高的重要原因,对于工业化养殖模式下具有更大规模鱼群的摄食行为检测效果也有待商榷。
4 建议
本研究结合图像纹理和Lucas-Kanade光流法来量化鱼群的摄食行为强度,并采用SVM训练检测鱼群摄食状态,取得良好的检测效果,可为鱼群精准投喂难题的研究提供参考,但同时需要在以下方面进行改进:(1)获取多角度图像增强模型泛化性。采用高分辨率视频采集设备获取更高质量的图像数据,并通过调整拍摄角度尽可能减少光照反射的影响,提高检测精度。同时增加不同拍摄角度的鱼群在不同天气、养殖环境下的游动图像,从而增强模型检测泛化性能。(2)划分不同摄食阶段阈值告警。将鱼群摄食过程划分为多个阶段,并对每个阶段划分不同的方向熵值范围,从而及时判定鱼群摄食状态,可用于指导饵料的自动投放。在获取鱼群的光流方向矢量过程中,考虑增加鱼群光流速度矢量特征对于检测结果的精度提高具有一定帮助。(3)结合水质环境变化控制投喂。将计算机视觉技术应用于水产养殖生产可有效促进渔业信息化发展,提升管理效率和养殖效益。在利用计算机视觉技术的同时要结合水温和溶氧量等水质环境变化因素,可更准确地监控鱼群状态,使水产养殖向精细化、科学化方向发展。
参考文献:
陈彩文,杜永贵,周超,孙传恒. 2017. 基于图像纹理特征的养殖鱼群摄食活动强度评估[J]. 农业工程学报,33(5):232-237. [Chen C W,Du Y G,Zhou C,Sun C H. 2017. Evaluation of feeding activity of shoal based on image texture[J]. Transactions of the Chinese Society of Agricultural Engineering,33(5):232-237.]
陳彩文,杜永贵,周超,孙传恒. 2018. 基于支持向量机的鱼群摄食行为识别技术[J]. 江苏农业科学,46(7):226-229. [Chen C W,Du Y G,Zhou C,Sun C H. 2018. Study on fish feeding behavior recognition technology based on support vector machine[J]. Jiangsu Agricultural Sciences,46(7):226-229.]
杜鉴豪,许力. 2011. 基于区域光流特征的异常行为检测[J]. 浙江大学学报(工学版),45(7):1161-1166. [Du J H,Xu L. 2011. Abnormal behavior detection based on regional optical flow[J]. Journal of Zhejiang University(Enginee-ring Science),45(7):1161-1166.]
段延娥,李道亮,李振波,傅泽田. 2015. 基于计算机视觉的水产动物视觉特征测量研究综述[J]. 农业工程学报,31(15):1-11. [Duan Y E,Li D L,Li Z B,Fu Z T. 2015. Review on visual attributes measurement research of aquatic animals based on computer vision[J]. Transactions of the Chinese Society of Agricultural Engineering,31(15):1-11.]
郭強,杨信廷,周超,吝凯,孙传恒,陈明. 2018. 基于形状与纹理特征的鱼类摄食状态检测方法[J]. 上海海洋大学学报,27(2): 181-189. [Guo Q,Yang X T,Zhou C,Lin K,Sun C H,Chen M. 2018. Fish feeding behavior detection method based on shape and texture features[J]. Journal of Shanghai Ocean University,27(2): 181-189.]
胡金有,王靖杰,张小栓,傅泽田. 2015. 水产养殖信息化关键技术研究现状与趋势[J]. 农业机械学报,46(7):251-263. [Hu J Y,Wang J J,Zhang X S,Fu Z T. 2015. Research status and development trends of information technologies in aquacultures[J]. Transactions of the Chinese Society for Agricultural Machinery,46(7):251-263.]
刘丽,匡纲要. 2009. 图像纹理特征提取方法综述[J]. 中国图象图形学报,14(4):622-635. [Liu L,Kuang G Y. 2009. Overview of image textural feature extraction methods[J]. Journal of Image and Graphics,14(4):622-635.]
乔峰,郑堤,胡利永,魏玉艳. 2015. 基于机器视觉实时决策的智能投饵系统研究[J]. 工程设计学报,22(6):528-533. [Qiao F,Zheng D,Hu L Y,Wei Y Y. 2015. Research on smart bait casting machine based on machine vision technology[J]. Chinese Journal of Engineering Design,22(6):528-533.]
王勇平,聂余满,谢成军,双丰. 2015. 基于机器视觉的养殖鱼群智能投饵系统设计与研究[J]. 仪表技术,(1):1-4. [Wang Y P,Nie Y M,Xie C J,Shuang F. 2015. Design and research of intelligent feeding system for farmed fish based on machine vision[J]. Instrumentation Technology,(1):1-4.]
邢克智,郭永军,陈成勋,田云臣,华旭峰,徐大为. 2013. 水产养殖先进传感与智能处理关键技术及产品[J]. 天津科技,(2): 45-46. [Xing K Z,Guo Y J,Chen C X,Tian Y C,Hua X F,Xu D W. 2013. Key technologies and products for advanced sensing and intelligent processing in aquaculture[J]. Tianjin Science & Technology,(2): 45-46.]
于欣,侯晓娇,卢焕达,余心杰,范良忠,刘鹰. 2014. 基于光流法与特征统计的鱼群异常行为检测[J]. 农业工程学报,30(2):162-168. [Yu X,Hou X J,Lu H D,Yu X J,Fan L Z,Liu Y. 2014. Anomaly detection of fish school behavior based on features statistical and optical flow methods[J]. Transactions of the Chinese Society of Agricultural Engineering,30(2):162-168.]
张学工. 2000. 关于统计学习理论与支持向量机[J]. 自动化学报,26(1): 32-42. [Zhang X G. 2000. Introduction to statistical learning theory and support vector machines[J]. Acta Automatica Sinica,26(1): 32-42.]
赵建,朱松明,叶章颖,刘鹰,李勇,卢焕达. 2016. 循环水养殖游泳型鱼类摄食活动强度评估方法研究[J]. 农业机械学报,47(8):288-293. [Zhao J,Zhu S M,Ye Z Y,Liu Y,Li Y,Lu H D. 2016. Assessing method for feeding activity of swimming fishes in RAS[J]. Transactions of the Chinese Society for Agricultural Machinery,47(8):288-293.]
周应祺,王军,钱卫国,曹道梅,张仲秋,柳玲飞. 2013. 鱼类集群行为的研究进展[J]. 上海海洋大学学报,22(5):734-743. [Zhou Y Q,Wang J,Qian W G,Cao D M,Zhang Z Q,Liu L F. 2013. Review of fish schooling behavior study[J]. Journal of Shanghai Ocean University,22(5):734-743.]
Andrade E L,Blunsden S,Fisher R B. 2005. Characterisation of optical flow anomalies in pedestrian traffic[C]//The IEE International Symposium on Imaging for Crime Prevention and Detection. The IEE International Symposium on:73-78.
Delcourt J,Denoel M,Yileff M,Poncin P. 2013. Video multitracking of fish behavior of fish behavior:A synthesis and future perspectives[J]. Fish and Fisheries,14(2):186-204.
Delphine M, Dominique P. 2014. Underwater video techniques for observing coastal marine biodiversity:A review of sixty years of publications(1952-2012)[J]. Fisheries Research, 154:44-62.
Hu L Y,Zheng D,Qiao F,Zhao J M,Chen J H. 2016. Research on smart cast for fish cage aquaculture based on image processing[C]//Proceedings of 2016 2nd Workshop on Advanced Research and Technology in Industry Applications(WARTIA 2016). Computer Science and Electronic Technology International Society: 6.
Liu Z Y,Li X,Fan L Z, Lu H D, Liu L, Liu Y. 2014. Measuring feeding activity of fish in RAS using computer vision[J]. Aquacultural Engineering,60:20-27.
Lucas B D,Kanade T. 1981. An iterative image registration technique with an application to stereo vision[C]//Proceedings of the 1981 DARPA Imaging Understanding Workshop. Carnegie Mellon University, the Robotics Institute: 121-130.
Ma H,Tsai T F,Liu C C. 2010. Real-time monitoring of water quality using temporal trajectory of live fish[J]. Expert Systems with Applications,37(7):5158-5171.
Pautsina A,Císař P,Štys D, Terjesen B F, Espmark Å M O. 2015. Infrared reflection system for indoor 3D tracking of fish[J]. Aquacultural Engineering,69:7-17.
Sadoul B,Mengues P E,Friggens N C,Prunet P,Colson V. 2014. A new method for measuring group behaviours of fish shoals from recorded videos taken in near aquaculture conditions[J]. Aquaculture,430:179-187.
Zhao J,Gu Z B,Shi M M,Lu H D,Li J P,Shen M W,Ye Z Y, Zhu S M. 2016. Spatial behavioral characteristics and statistics-based kinetic energy modeling in special beha-viors detection of a shoal of fish in a recirculating aquaculture system[J]. Computers and Electronics in Agriculture,127:271-280.
(責任编辑 邓慧灵)