基于超声波雷达的车位检测算法
2019-09-10史云鹏罗作煌陈凤冉田春月
匡 兵, 史云鹏, 罗作煌, 陈凤冉, 田春月
(1.桂林电子科技大学 机电工程学院,广西 桂林 541004;2.惠州市德赛西威汽车电子股份有限公司,广东 惠州 516000)
车位检测是自动泊车的关键技术之一,车位检测的精度将直接影响车辆泊入车位后的姿态和泊车成功率。车位检测主要解决车辆对周围环境的感知问题,即通过车载传感器搜集外界环境信息并通过算法处理,较准确地判断出周围的障碍物和车位信息。现有的车位检测方法主要分为三类:基于超声波雷达的车位检测;基于视觉传感器的车位检测;基于超声波雷达和视觉传感器信息融合的车位检测。
基于视觉传感器的车位检测单一地使用视觉传感器进行障碍物识别和车位检测郭剑鹰等[1]基于多视觉传感器进行车位识别。李磊[2]应用全景视觉进行车位检测和识别。马伟[3]使用机器视觉检测车位线的方法进行车位检测。由于视觉传感器对光线变化较敏感,且测距误差大,基于视觉传感器的车位检测在场景适应性和障碍物检测方面效果不理想。
基于超声波雷达和视觉传感器信息融合的车位检测将超声波雷达和视觉传感器获取的环境信息进行数据融合,以提高车位检测精度和场景适应性。姜金山[4]采用基于超声波传感器和摄像头数据融合的方法来检测车位。沈峥楠[5]利用超声波雷达探测车位深度,摄像头探测障碍车轮毂的方法来检测车位。该方法虽然能在一定程度上提高车位检测的精度,但由于涉及到异构传感器的数据融合,使得算法的复杂度和硬件成本大大增加,不利于市场推广。
基于超声波雷达的车位检测,利用超声波测距原理来感知周围障碍物和车位,超声波雷达硬件成本低,场景适应性好,有广阔的市场前景。方玉杰[6]使用超声波传感器进行垂直车位的检测。魏振亚[7]基于超声波雷达进行垂直和水平车位的检测。但是这些检测方法对应的场景太过理想化,未考虑到实际泊车环境中出现的主车与障碍车辆不平行,两辆障碍车辆不在同一条水平线上等情况。
鉴于此,基于超声波雷达设计车位检测算法,并对多个现实场景进行分析、验证。
1 算法设计
当启动自动泊车功能时,车辆将自动进入车位检测模式。基于超声波雷达进行车位检测时,车辆速度一般不超过30 km/h(超声波在空气中的传播速度有限,超声波雷达收发信号需要时间,车速太快会出现障碍物漏检和车位检测精度下降等情况)。
1)创建一个存储长距超声波雷达测距信息的数据缓存器。缓存器的大小由当前车速决定,车速越快,则缓存器越小,前提是缓存器的大小要大于设定的单步泊车最大车位长度除以当前车速。最大车位长度和最小车位长度是由泊车步数来确定的,当限定最大泊车步数为5步时,那么5步泊车所对应的车位长度为最小车位长度,单步泊车所对应的车位长度为最大车位长度。
2)对缓存器中的测距数据进行分析,判别出车位的起始点和终止点。由于超声波雷达易受周围环境噪声的影响而出现误检的情况,当仅有1个数据发生突变时,算法将不认为已检测到障碍物,而将其当作误检处理,但也不排除存在细小障碍物的情况,将这部分的算法处理归到泊车过程中短距雷达的碰撞检测。当缓存器中的数据出现2个或2个以上的连续突变时,则认为已检测到障碍物。为了更精确地判断障碍物的起始点和终止点,需对障碍物的形状进行分类。常见的障碍物外形一般分为方形和圆形2种,由于方形和圆形障碍物测距的突变程度不同,可以通过预设阈值的方法来判别障碍物类型,结合障碍物类型和缓存器中的数据变化即可较准确地推算出障碍物的起始点和终止点。障碍物可以是柱子、障碍车辆或者其他。以障碍车辆作为障碍物进行分析,车位检测过程如图1所示。
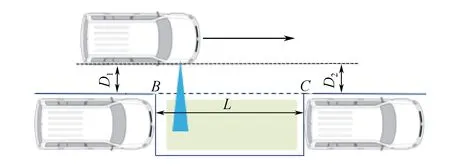
图1 车位检测过程图
D1为主车距第1个障碍车辆的横向距离,D2为主车距第2个障碍车辆的横向距离,主车距车位的横向距离D取D1和D2中的小值。由于超声波雷达探测距离有限,D的值太大会影响车位检测的精度和降低对车位纵深障碍物的检出率,应根据超声波雷达的性能将D限制在[DL,DH]范围内。其中:DL为主车距车位横向距离的最小值,应大于超声波雷达的测距盲区;DH为主车距车位横向距离的最大值,通常都小于1.8 m。当经过第1个障碍车辆,超声波雷达的测距突变值大于D+W时(W为车宽),则认为已检测到车位起始点,记为点B;当经过第2个障碍车辆,超声波雷达的测距突变值小于D+W时,则认为已检测到车位终止点,记为点C,并记录下在B、C两点处车辆后轴中点在局部航位推算坐标系中的坐标值,用于计算B、C点间的距离L,作为该车位是否为有效车位的判别条件。
3)将缓存器中的数据用最小二乘法进行拟合,进一步判断车辆和车位之间的夹角,修正车位长度L,使车位信息更精确。当L大于设定的最小车位长度时,就认为已检测到有效车位,可以停车进行路径规划和路径跟踪等后续操作。当L大于设定的最大车位长度时,清除缓存器中的数据,此时可以选择停车,进行泊车操作,也可以继续向前搜索新车位,搜索新车位时旧车位会被系统“记住”,直到车辆继续向前行驶超过一定的距离,旧车位才会被放弃,该距离一般不会超过15 m。
基于超声波雷达的车位检测算法流程如图2所示。
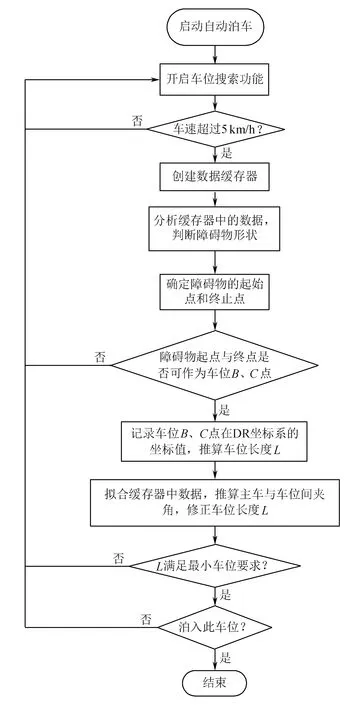
图2 车位检测算法流程图

图3 平行车位中存在障碍物的场景
2 场景分析
2.1 平行车位检测
平行车位中存在障碍物的场景如图3所示,在障碍车辆S与E之间存在障碍物,此时车位的终止点不再是E车的车尾了,而是障碍物的左边界,当L小于最小车位长度时,判定未搜索到车位,当L大于最小车位长度时,判定搜索到了有效车位,车辆的停靠基准为S车的上边沿。若障碍物的距离大于D1+W,则忽略障碍物的存在,继续向前搜索车位终止点。
现实中单边无障碍物的场景较为常见,图4所为平行车位右侧无障碍物的情况,当检测到车位起始点B后,车辆向前行驶的距离L超过最小车位长度,无论车位前方是否有障碍物,都可判定此车位为有效车位。图5为平行车位左侧无障碍物的情况,自开启车位检测起,到检测出车位终止点C的距离L大于最小车位长度时,判定此车位为有效车位。

图4 平行车位右侧无障碍物的场景
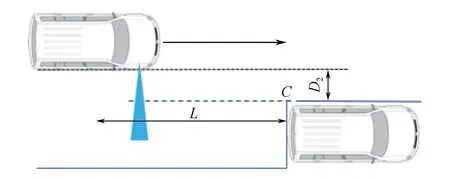
图5 平行车位左侧无障碍物的场景
在无路沿的情况下,障碍车辆错位停放,即D1≠D2,系统以小值作为停放基准。如图6所示,主车与车位的侧向距离D=D1,当车位的长度和宽度均满足要求时,车辆将以S车的上边界作为停放标准;在有路沿的情况下,如图7所示,为满足规范停车的要求,以路沿作为停放基准,前提是路沿在超声波雷达的探测范围内。
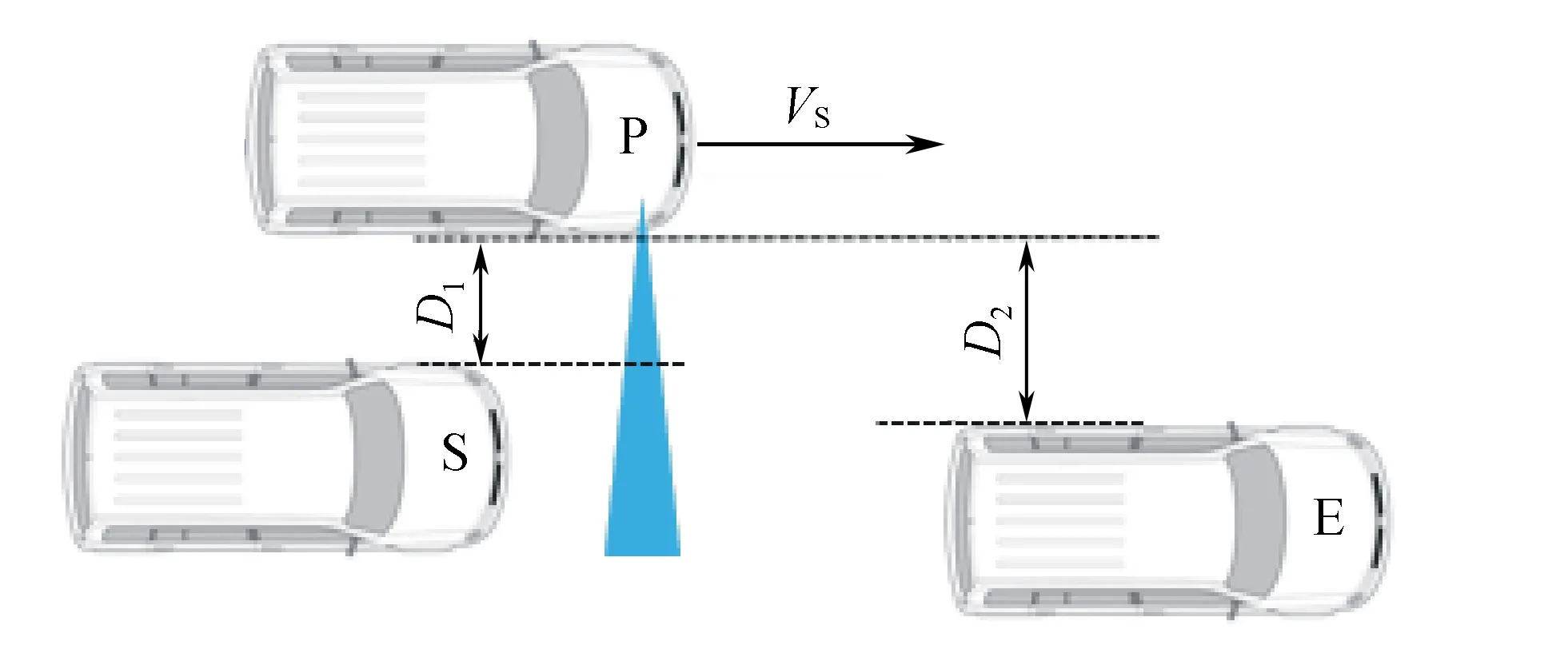
图6 障碍车辆错位停放的场景

图7 有路沿障碍车辆错位停放的场景
2.2 垂直车位检测
超声波在空气中传播时能量会被损耗,故探测距离有限,市场上成熟的超声波探头探测距离均不超过5 m。这样的探测距离在检测垂直车位时将探测不到车位纵深的障碍物,这时将不能再以D加车辆长度作为车位起始点和终止点的判别条件,为保证测距的精度和稳定性,通常将判别条件设为D+Δ小于雷达的测距极限,Δ的取值与雷达的性能有关,若雷达的测距极限为5 m,则Δ通常取值为2 m。单侧有障碍物的垂直车位场景如图8、图9所示。图8为垂直车位右侧无障碍物的情况,当检测到车位起始点B后,车辆向前行驶的距离L超过垂直车位所需的最小车位长度,无论车位前方是否有障碍物,都可判定此车位为有效车位。图9为垂直车位左侧无障碍物的情况,自开启车位检测起,到检测出车位终止点C的距离L大于垂直车位所需的最小车位长度时,判定此车位为有效车位。
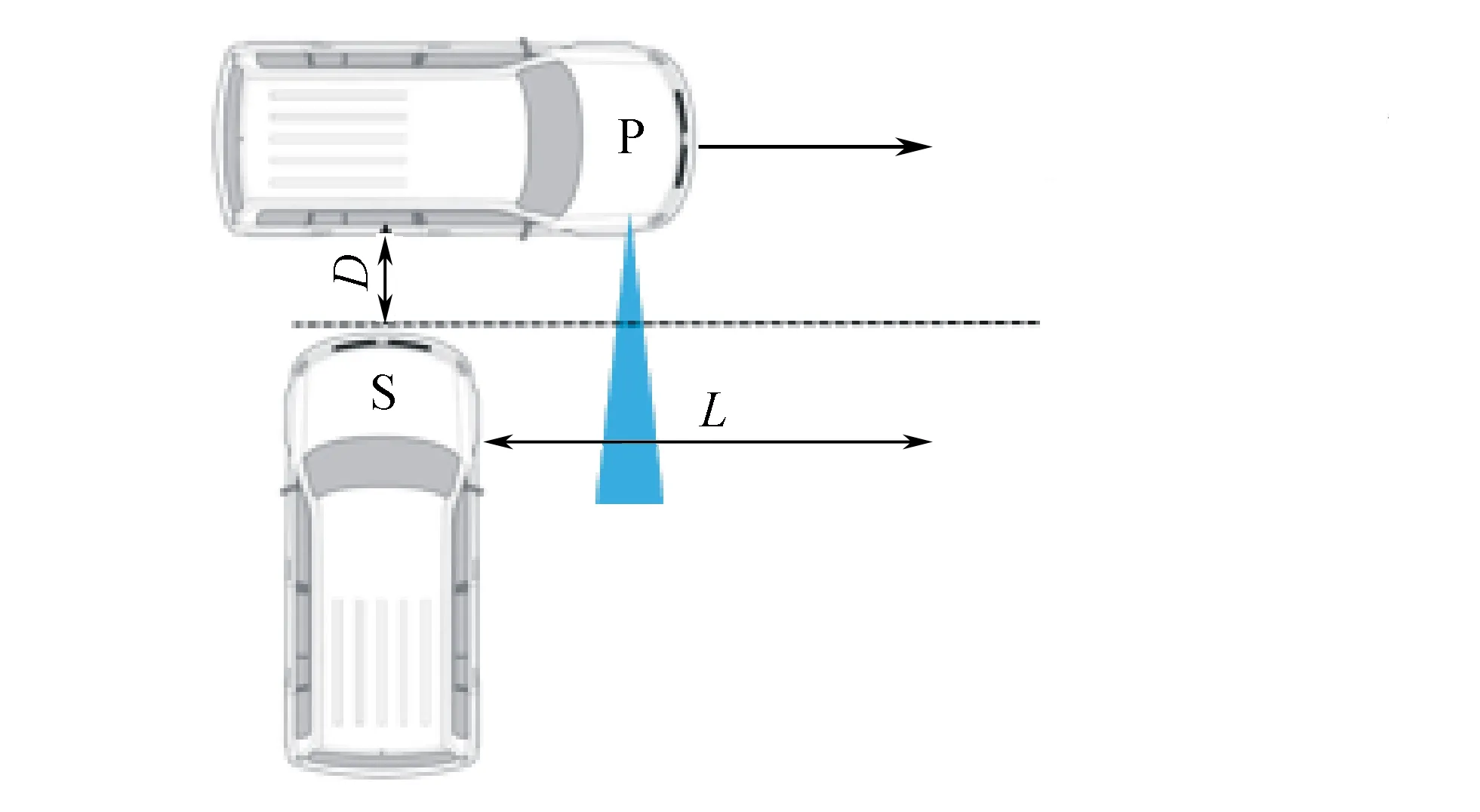
图8 垂直车位右侧无障碍物的场景
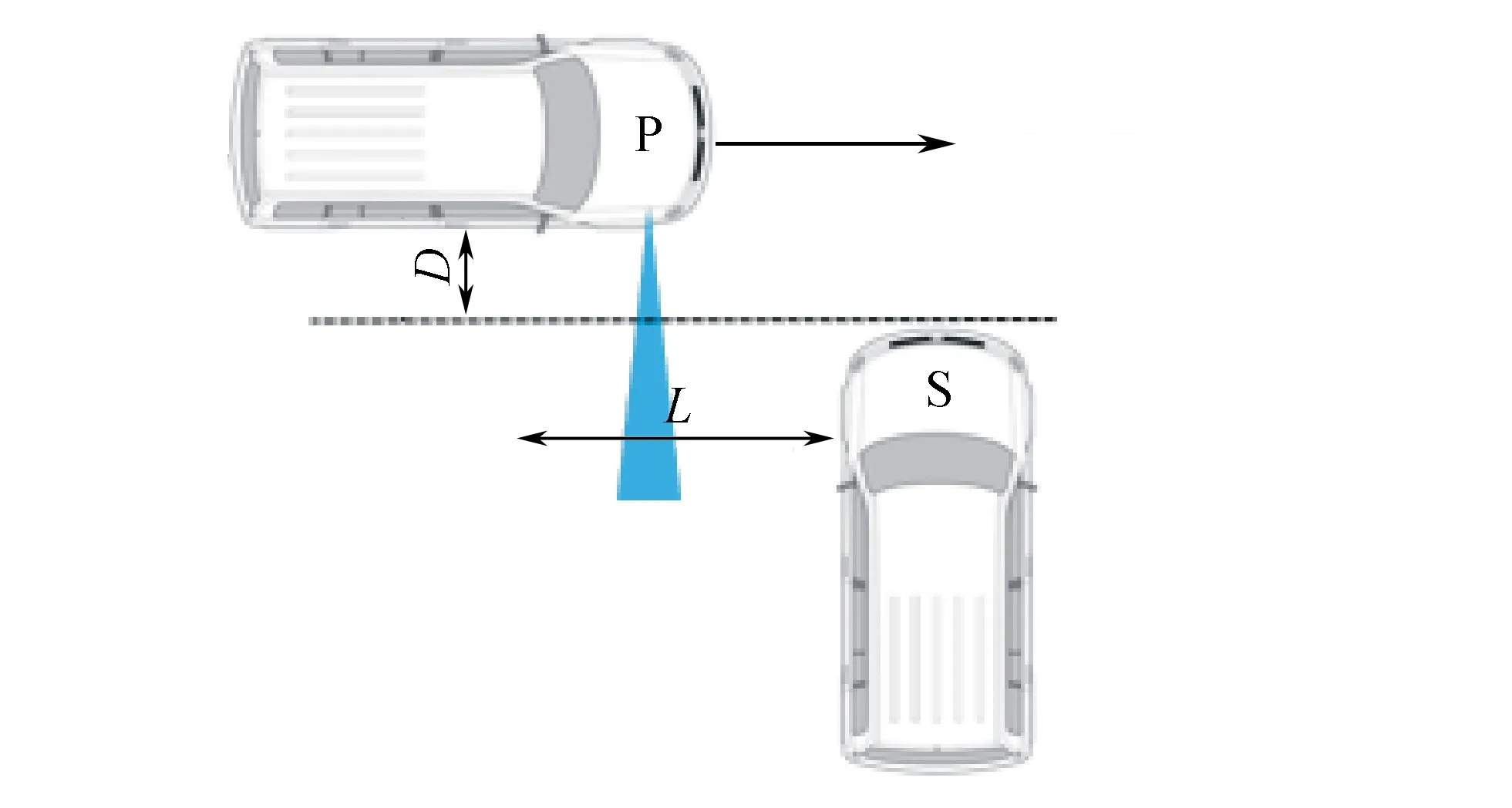
图9 垂直车位左侧无障碍物的场景
由于超声波雷达测距范围有限,当车位中存在障碍物时,垂直车位与平行车位的检测略有不同。当障碍物在D+Δ内时,车位起始点和终止点的判别方法与平行车位相同,当障碍物不在D+Δ内时,雷达探测不到车位纵深处的障碍物,如图10所示,此时车位的起始点和终止点被判定为S车的右边界和E车的左边界,在L满足最小车位条件时,图10中方框位置被判定为一个有效车位,车位中的障碍物只能依靠泊车过程中短距雷达的碰撞检测检出。
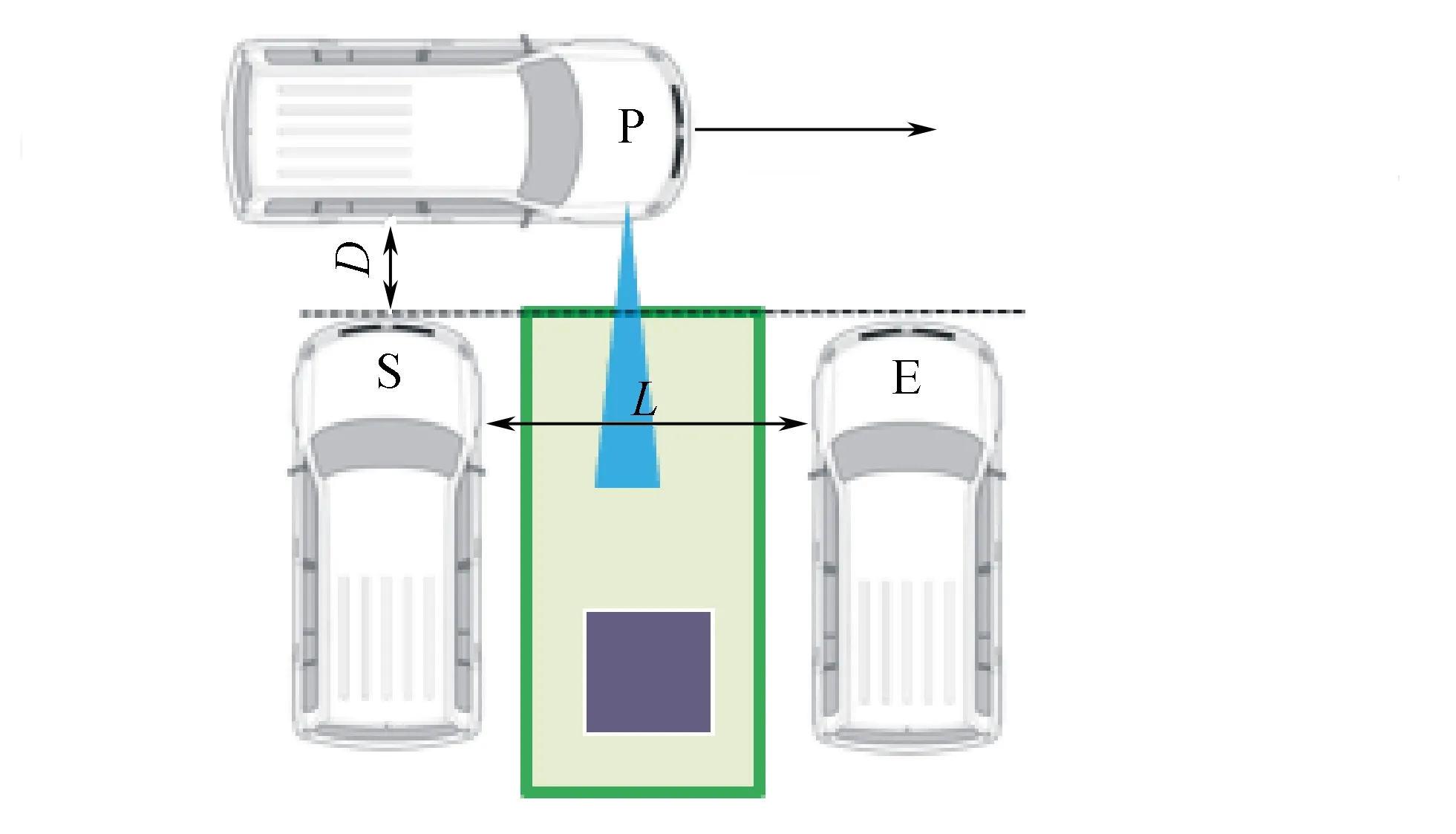
图10 垂直车位中存在障碍物的场景
2.3 车位自定义模式
为提高基于超声波车位检测的场景适应性,车位检测算法中加入了车位自定义模式。如车辆处于一个无障碍物的空旷场景中,超声波雷达在一段距离内未检测到障碍物(小轿车通常设定为15 m),用户就可以停车通过人机交互界面选择车位自定义模式。
空旷环境下的车位自定义场景如图11所示,实线框区域为自定义可泊区域,用户可以通过人机交互界面拖动车模到可泊区域内,并将其作为目标车位,目标车位的尺寸为设定的最大车位尺寸,如图中虚线框所示。默认的车位类型为平行车位,如图11中1号车位,但也可以手动改为垂直车位,如图11中2号车位,若将车模拖至可泊区域外,则该目标车位将视为无效车位,如图11中3号车位。

图11 空旷环境下的车位自定义场景
3 实验验证
以昂科威车为载体,采用奥迪威的超声波雷达对所设计的车位检测算法在多种场景和速度工况下进行验证。奥迪威的长距雷达能在0.3~3.5 m检测到障碍物,在3.5~5 m检测到路沿,故将D定在0.5~1.5 m,Δ的取值为2 m。雷达实物如图12所示。以昂科威的车辆尺寸为依据,将平行车位的最小长度阈值设为6 m,最大长度阈值设为8 m,垂直车位的最小长度阈值设为2.5 m。

图12 奥迪威超声波雷达探头
3.1 实验设计
确定一个原点,作为局部航位推算坐标系的原点,测量得到每个场景下车位起始点和终止点距原点的距离值,并将其作为真实距离值。车辆每次都从原点以不同的速度开始检测车位,通过车位检测算法推算出B、C点(即车位起始点和终止点)在局部航位推算坐标系中的值。由于本实验场景是在主车与车位平行的条件下进行,只需比较B、C点的Y坐标值(车辆的前进方向为Y方向),即可判别出车位长度。将B、C点距原点的真实距离与车位检测算法推算出的距离值进行对比,得出车位检测算法的精度。为了给后续路径规划和路径跟踪提供较准确的车位信息,车位长度L的误差不能超过30 cm,B、C点的单点误差要在[-15 cm,15 cm]。
3.2 实验结果
图13为两侧都是障碍车辆的平行车位场景。在图13场景下,对车位检测算法进行精度验证,验证数据如表1所示。车位B、C点距原点的真实距离为14.93、22.37 m,车位的实际长度为7.44 m。

图13 两侧都是障碍车辆的平行车位场景
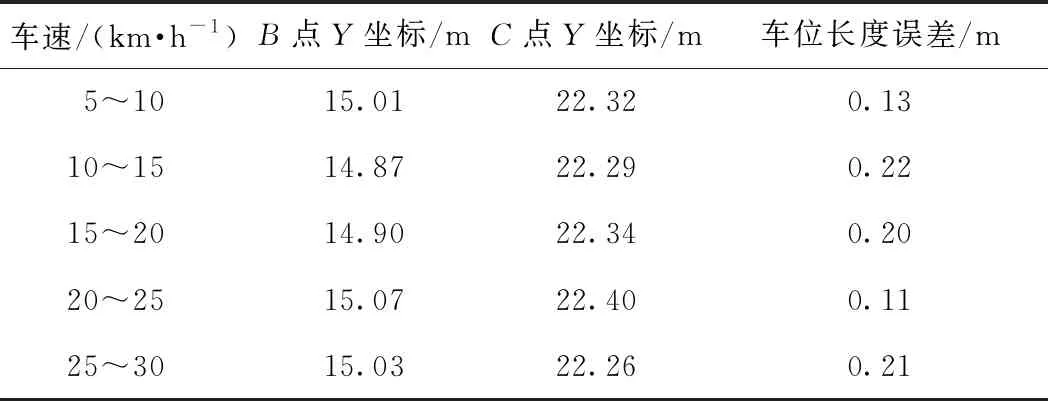
车速/(km·h-1)B点Y坐标/mC点Y坐标/m车位长度误差/m5~1015.0122.320.1310~1514.8722.290.2215~2014.9022.340.2020~2515.0722.400.1125~3015.0322.260.21
从表1可看出,车位检测算法在图13工况下,以不同车速检测车位时,B、C点的最大误差为14 cm,车位长度L的最大误差为22 cm,满足车位检测算法对精度的要求。
图14为两侧都是方形障碍物的垂直车位场景。在图14场景下,对车位检测算法进行精度验证,验证数据如表2所示。车位B、C点距原点的真实距离为13.45、16.92 m,车位的实际长度为3.47 m。

图14 两侧都是方形障碍物的垂直车位场景
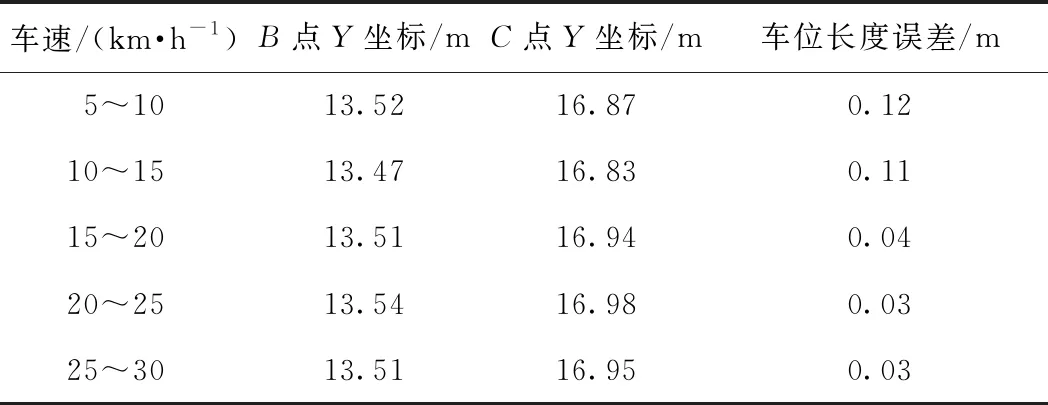
车速/(km·h-1)B点Y坐标/mC点Y坐标/m车位长度误差/m5~1013.5216.870.1210~1513.4716.830.1115~2013.5116.940.0420~2513.5416.980.0325~3013.5116.950.03
从表2可看出,车位检测算法在图14工况下,以不同车速检测车位时,B、C点的最大误差为9 cm,车位长度L的最大误差为12 cm,满足车位检测算法对精度的要求。
图15为一侧为车辆另一侧为方形障碍物的垂直车位场景。在图15场景下,对车位检测算法进行精度验证,验证数据如表3所示。车位B、C点距原点的真实距离为13.63、16.77 m,车位的实际长度为3.14 m。

图15 一侧为车辆另一侧为方形障碍物的垂直车位场景
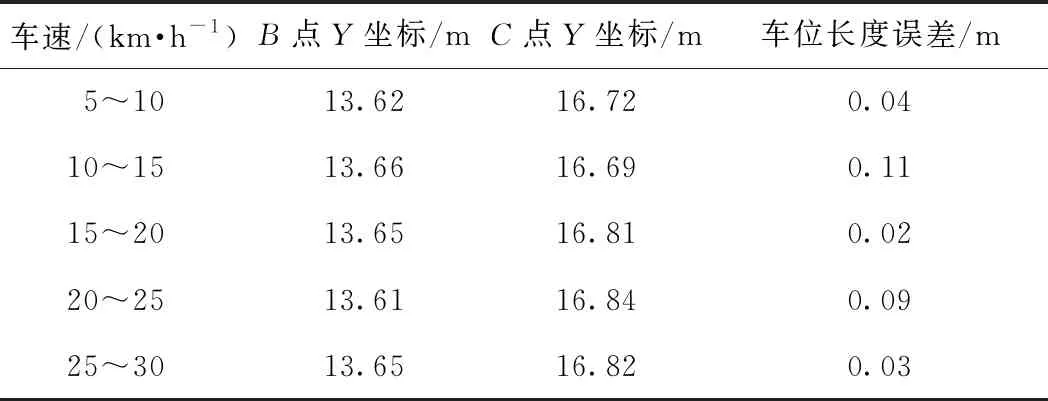
车速/(km·h-1)B点Y坐标/mC点Y坐标/m车位长度误差/m5~1013.6216.720.0410~1513.6616.690.1115~2013.6516.810.0220~2513.6116.840.0925~3013.6516.820.03
从表3可看出,车位检测算法在图15工况下,以不同车速检测车位时,B、C点的最大误差为8 cm,车位长度L的最大误差为11 cm,满足车位检测算法对精度的要求。
以上场景中,车位检测算法均能在误差范围内检出车位的B、C点,证明了该算法的有效性。限于篇幅,不再列出其他场景的实验结果。
4 结束语
提出了一种基于超声波雷达的车位检测算法,并在多种典型场景下对算法逻辑进行分析。以昂科威车为载体,奥迪威超声波雷达为研究对象,对所设计的车位检测算法在多种场景和速度工况下进行实车验证。测试结果表明,该算法能满足自动泊车系统对车位检测精度的要求,超声波雷达低廉的成本也更有利于市场推广。
