多通道并行可程控遥感数据采集系统
2019-08-28李欣欣程利甫刘建锋
白 玉,李欣欣,王 豪,程利甫,刘建锋
(1.沈阳航空航天大学电子信息工程学院,沈阳 辽宁 110136;2.上海航天电子技术研究所,上海 200082)
0 引言
微波成像仪是一种被动式无源微波遥感器,可以全天时、全天候对大气、海洋和陆地进行观测[1]。在观测过程中,微波辐射能量经反射面进入馈源,再经过接收机转换为电压信号后,输出给遥感数据采集系统[2]。系统将模拟信号转换为数字信号,利用FPGA控制多路通道的信号采集,来对外界进行遥感。
在数据采集系统中,有多种方法可以实现多通道信号采集功能。有人通过使用FPGA来控制模拟开关的地址切换(不同模拟地址对应不同通道信号),对不同通道的信号进行采集,即用一个AD(模数转换器)芯片来采集多通道信号的方法[3]。这种方法节约硬件电路,降低成本,但对所有通道信号采集一遍花费时间长,通道数目越多、时间越长。有人通过使用具有多路通道输入的AD芯片,将这些AD芯片采取串并结合的方式,来实现对多通道信号并行采集的功能[4]。此方法同步性比较好,但是在扩展通道数目的过程中,需要增加AD芯片数量。也有人设计出基于TIADC(并行时间交替采样技术)的多通道并行采集系统,利用多个AD对一路输入信号进行采样、重组序列[5]。该方法常见被测试、测量设备使用,但此方法会造成通道、增益误差[6],需要进行调整。本文设计的数据采集系统应用于微波成像仪,其系统的采样间隔时间影响微波成像仪的空间分辨率[7]。为了提高空间分辨率,对系统提出多通道并行采集、采样起始时间和采样间隔时间可控的要求。本文针对现有系统中无法控制各通道采集起始时间和采样间隔的局限性,提出一种多通道并行可程控的遥感数据采集系统。
1 传统遥感数据采集系统
在传统遥感数据采集系统设计中,采用顺行的方法进行采集。通过FPGA控制模拟门的地址,根据不同地址,选择一路信号输出给AD芯片进行采集。采完一个通道信号后,切换模拟地址,顺行采集下一个通道的信号,原理如图1所示。
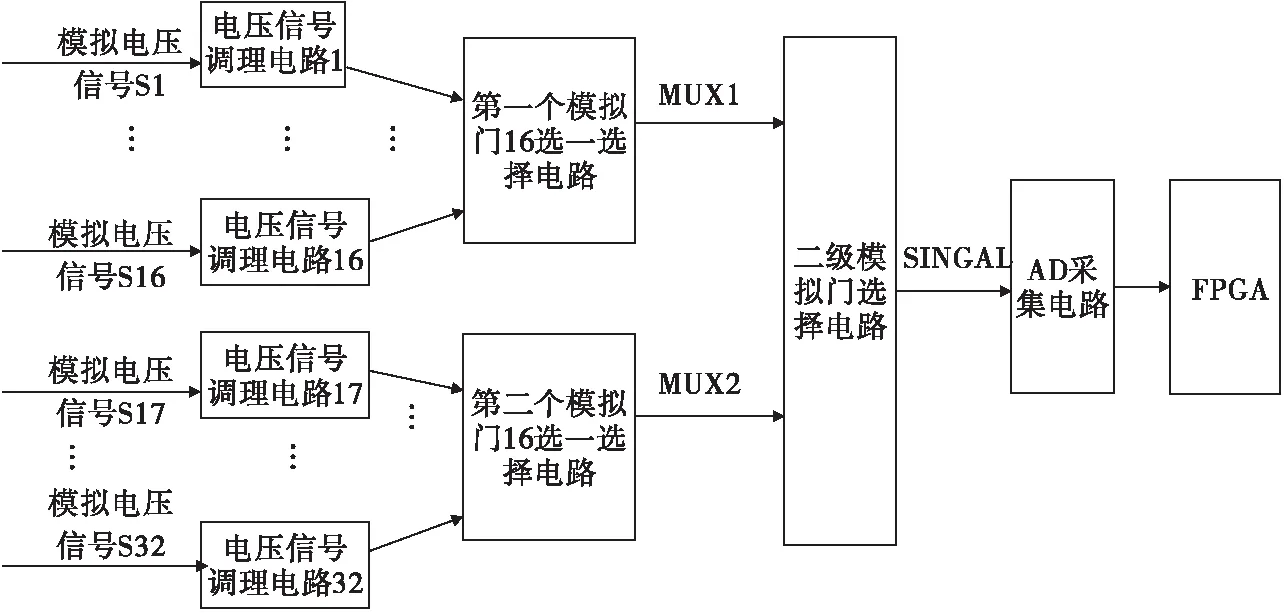
图1 顺行采集原理图Fig.1 Row-by-row collection principle schematic diagram
此方法节约成本,减少重量,可对多路信号采集,也方便扩展采集通道数,但不能对多通道信号并行采集。
2 多通道并行程控遥感数据采集系统
2.1 硬件设计关键电路
整个遥感数据采集系统,其硬件设计原理框图如图2所示。
2.1.1信号调理电路
此电路的原理是通过放大器,将外界输入的微弱电压信号经过滤波放大,使信号在AD的采集量程范围内,电路原理图如图3所示。
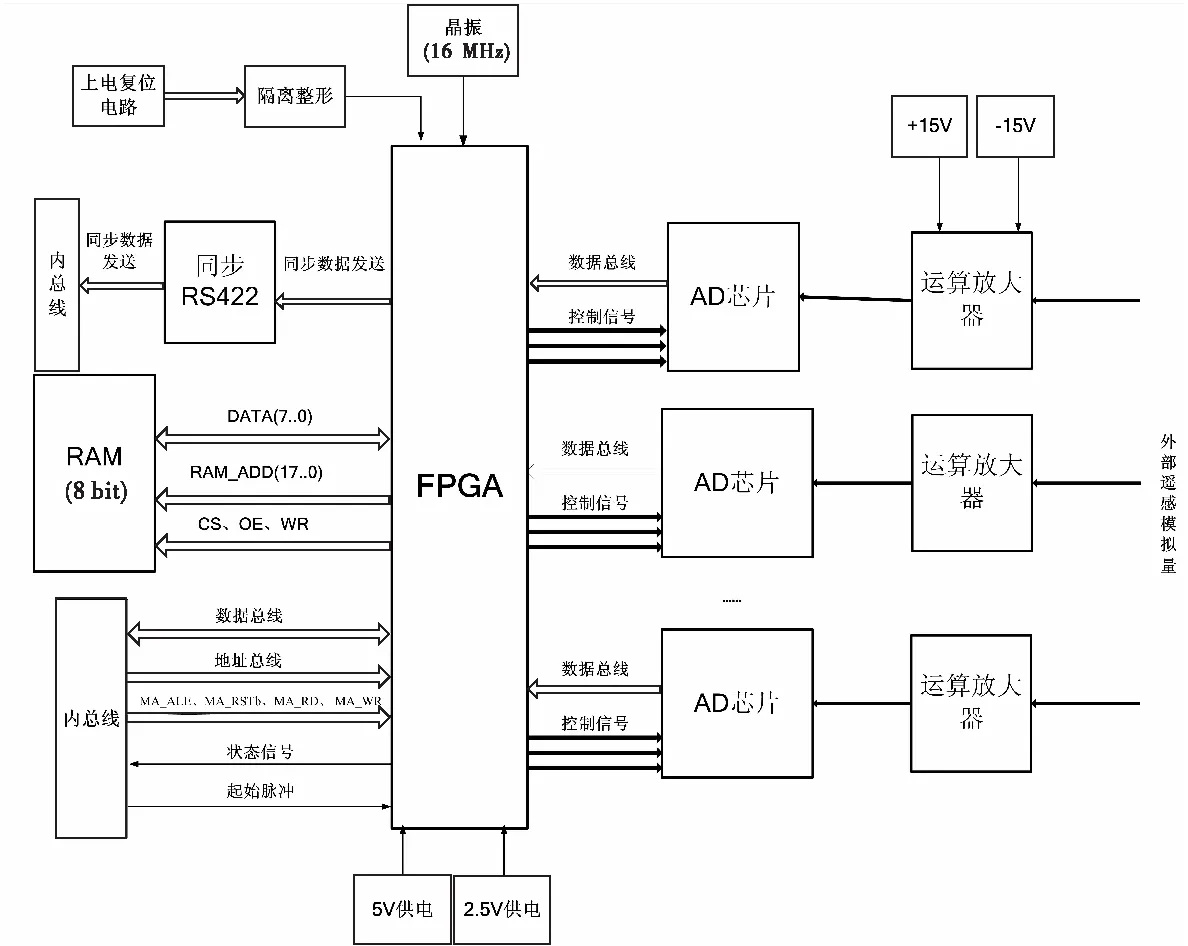
图2 系统硬件设计原理框图Fig.2 System hardware design principle block diagram
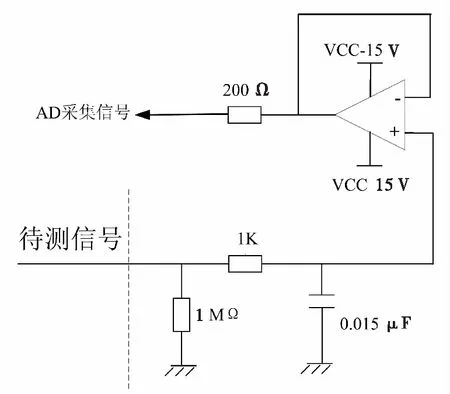
图3 信号调理电路Fig.3 Signal conditioning circuit
2.1.2遥感采集电路
考虑到需要对每一通道的采样间隔时间进行控制,因此遥感采集电路是采用完全并行采集的设计。在此电路中,选用具有16 bit转换精度、采样率200 Kbps、采集信号输入量程为-10~+10 V、逐次逼近型的AD976A芯片。将接收到十六进制的遥感数据转换为十进制数字A。其中A和电压V之间的转换关系为:
(1)
(2)
2.1.3差分信号收发电路
使用差分信号作为数据传输的通道,具有抗干扰能力强,有效抑制EMI和产生精准时序的作用,可靠性比较高。其单端信号转换为差分信号是通过使用DS26C31、DS26C32芯片。DS26C32芯片用于设计接收电路,DS26C31用于差分信号发送电路。
控制DS26C31芯片工作的使能信号RC_422由上电复位电路控制。当系统上电后,由于电容处于充电状态,MA_RC_IN信号此时为高电平,在反相器中对应输出MA_RC_422信号此时为低电平。当电容充电完成后,电路处于通的状态,此时,MA_RC_IN信号为低电平,MA_RC_422信号为高电平。原理如图4所示。
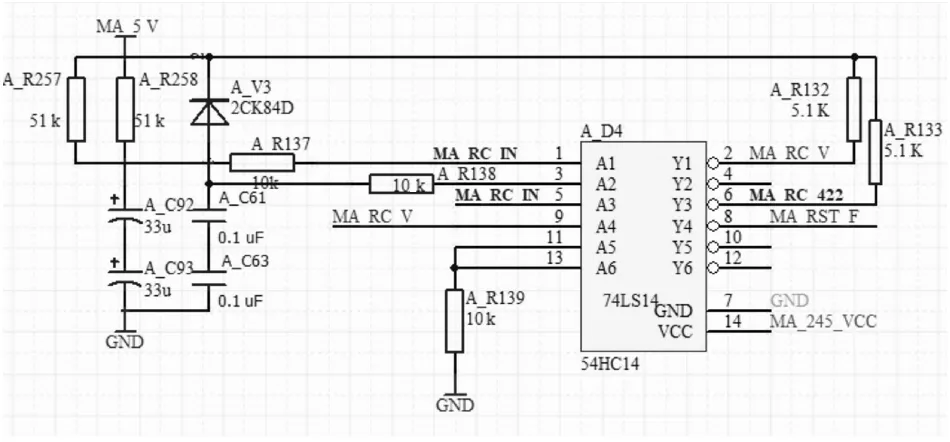
图4 上电复位电路Fig.4 Power on reset circuit
2.2 软件设计关键功能与模块
通过FPGA实现对遥感、定标数据进行采集、存储、传输的过程,控制多路通道并行采集,并对遥感数据采集系统中每个通道的工作时序进行控制,如图5所示。
对于FPGA的设计,采用把整个大功能往下分成小的功能模块的方法。整个FPGA架构如图6所示。
先把各个整个功能分为两大部分:一部分为对通道采集时间的控制,主要实现在不同工作模式下,分别对定标数据、遥感数据的采集时序控制;另一部分是对遥感通道采集,以及数据的传送功能。
2.2.1起始脉冲滤波功能
起始脉冲的作用是当其为低脉冲时,启动遥感通道开始工作。为了防止上电后,FPGA收到误脉冲信号,产生一个错误控制请求。采用给起始脉冲滤波的技术,将收到的脉冲信号进行滤波整形。其原理是对收到的I_PULSE信号进行判别,令状态寄存器FITER初始状态为X“F”。当I_PULSE是持续一段时间的高电平或者低电平,此时FITER=X“F”或FITER=X“0”,则输出高电平或者低电平。其仿真波形如图7所示。
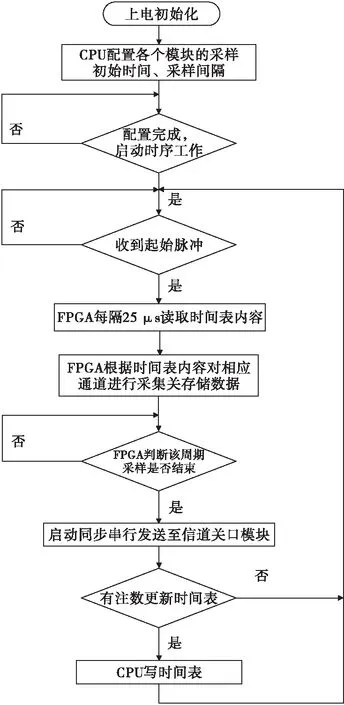
图5 通道采集流程图Fig.5 Channel collection flow chart
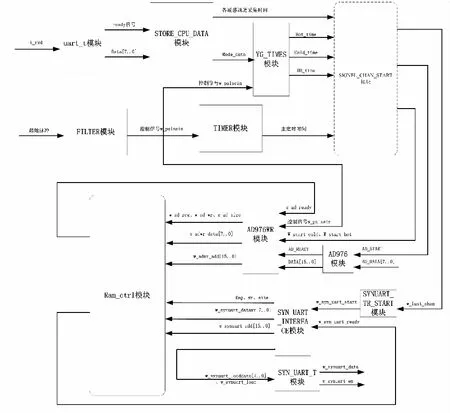
图6 FPGA模块框图Fig.6 Block diagram of FPGA module

图7 滤波模块仿真波形Fig.7 Simulation waveform of filter module
2.2.2多端口访问随机存取存储器(RAM)功能
在对通道数据进行存储时,其核心是解决多个通道数据同时对RAM进行读写、存储的问题。通过设计一个RAM IP核来实现上述功能。在此RAM IP软核中,依据RAM芯片工作时序进行设计,既可以作为连接实际芯片工作的模块,也可以作为通用IP 软核,允许多个端口进行读写访问。此RAM 模块可以依据自身实际需求,对端口数量进行扩展或者减少,同时此模块的地址数量也可改变。对于各端口访问的优先级顺序,依据每个端口访问RAM的频繁程度来进行确认。优先级的级数Y计算方法如下,假设系统时钟周期时间为TCLK,访问一次RAM的时间为TMIN,优先级级数最高的端口,访问RAM时间间隔为TMAX:
TMIN=3TCLK
(3)
(4)
模块的仿真波形如图8所示。
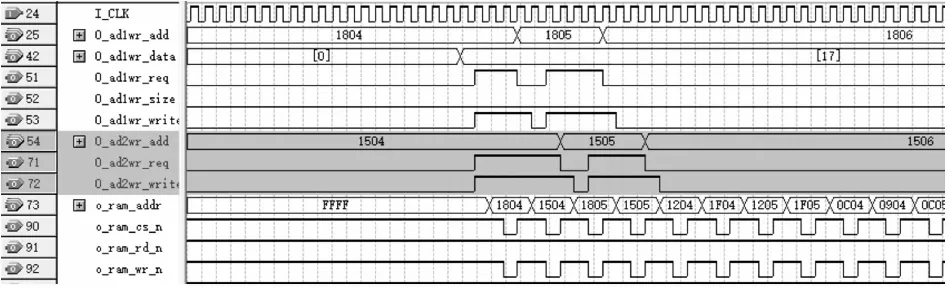
图8 多端口同时访问RAM时序图Fig.8 Multi port simultaneous access to RAM sequence diagram
每个信号经采集一次后转换为16 bit数据,按高低字节顺序存入RAM中。由于RAM数据位为8 bit,每次采集往RAM中写要两次。每个访问端口都有5个信号,分别为访问请求信号、写信号、工作模式信号、地址信号、数据信号。当访问请求信号为高电平时,此端口开始访问RAM。
2.2.3对RAM读写控制功能
在数据传输过程中,对RAM进行正确可靠的读写操作,也是非常重要的一环。对RAM进行写操作的原理是:当收到AD芯片采集完成后的READY信号和数据,此时判断起始脉冲信号是否为低脉冲;若是则写地址按照提前规划的位置进行写操作,若不是则地址继续累加。这是按照每一个通道的数据存储在同一块区域的原则,来划分每一个通道的存储地址空间。
在对RAM进行读操作时,先判断所有通道数据是否已经采集结束。若是,开始给发送模块一个启动信号。发送模块按照规定的数据传输速率,同步发送出去。
2.2.4注数指令接收功能
对于注数指令的接收,是通过异步422差分信号电路、按照422协议进行接收。为保证数据正确性,在接收数据包中,设置包头。以包头作为接收数据的判断。对于此模块可以按照不同的速率进行接收。其速率的改变,通过设置其常数DIV_VALUE。其模块仿真波形如图9所示。
(5)
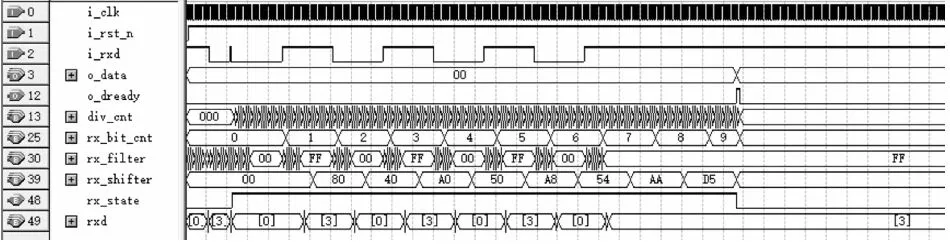
图9 收数模块仿真波形Fig.9 Receive module simulation waveform
2.2.5采样起始时间可控与采样间隔可变功能
通过接收注数指令,每个通道确定采集起始时间。控制AD芯片采集的启动模块接收到起始脉冲信号和采集起始时间后,对此进行判断,当计数器到达起始时间后,发送启动信号给AD芯片,控制其采集。
注数指令不光包含各通道采集的起始时间,也包括各通道的采样时间间隔。时间模块根据不同工种模式,来确认有不同的采样点数。将采样点数发送给控制AD芯片采集的模块,通过判断采集次数来结束本周期的采样循环。
3 试验结果与分析
在系统进行测试过程中,通过地面测试系统向数据采集系统发送起始脉冲和注数指令,并且将模拟的外界电压输入给遥感通道,得到多个通道并行采集时的遥感实验数据。测试系统将采集到每一包的数据,根据平均值、方差公式计算得出结果,并将每包数据中的采样点进行绘图。
图10是某一数据包内183 GHz通道在采集1 V电压信号,A(遥感)(V)代表此通道遥感数据平均值,D(遥感)(mV)代表此通道遥感数据方差,MAX为此数据包内该通道所有采样点的最大采样值,MIN为此数据包内该通道所有采样点的最小采样值。横坐标代表采样点数目,纵坐标代表电压值。
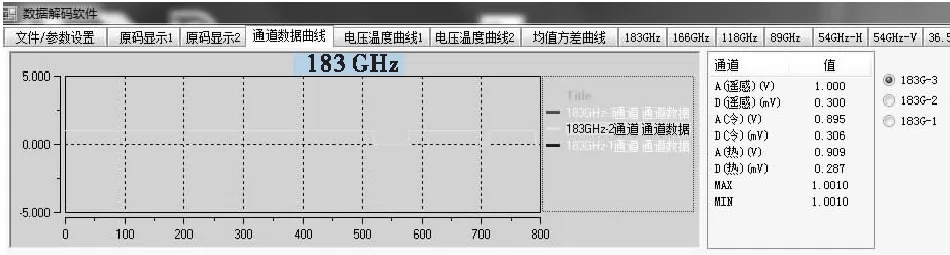
图10 185 GHz通道采集图Fig.10 183 GHz channel collection diagram
在不同工作模式下,当切换为1.7 s工作模式时,各通道不进行采样,也就是上图中低电平部分。计算均值和方差时也把这些数据剔除。数据对比如表1所示。
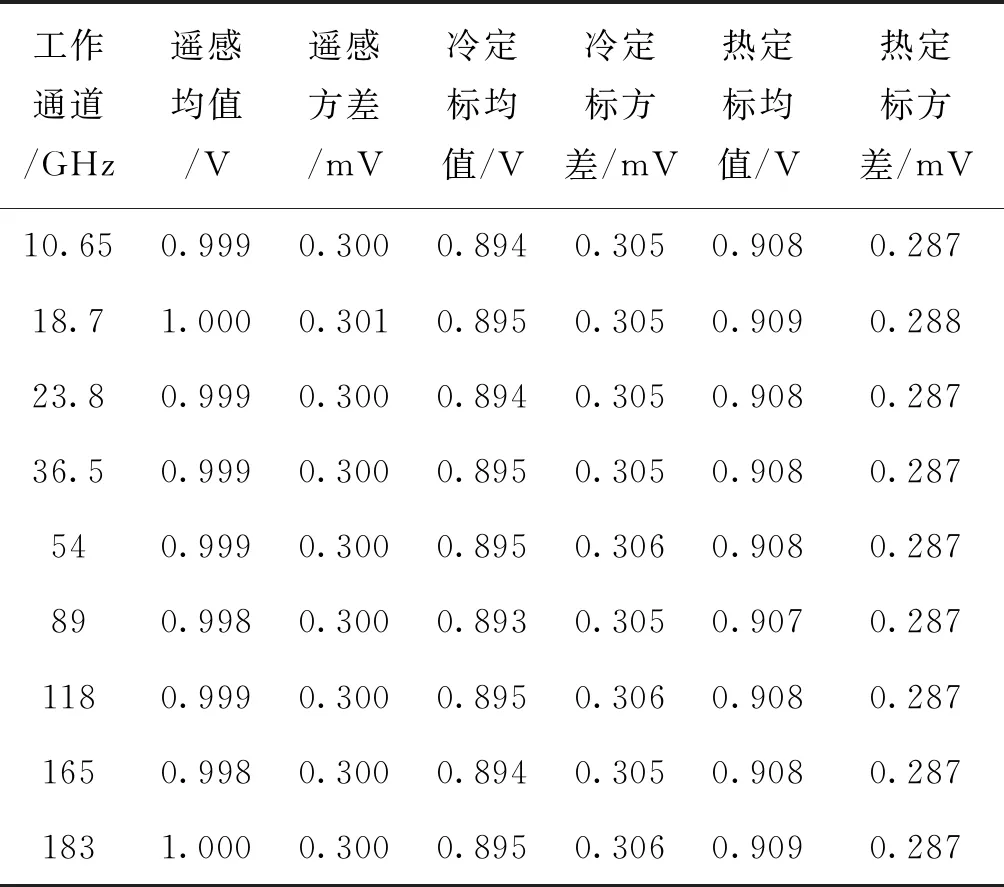
表1 通道采集数据的均值和方差对比
表1在同频段只选一个通道,且来源为同一包数据的采样值。在这包数据中给所有通道遥感采集的电压值都为1 V,冷、热定标采集数据值均为0.9 V。此表显示各通道无论是对遥感、冷定标、热定标数据进行采集,采样数值的方差很小,均在0.3 mV左右。
图11和图12分别显示的为各通道采集不同电压值的遥感均值图和冷热定标均值图。图中横坐标是包计数,单位为个,纵坐标是电压值,单位为V。根据冷热定标数据可以计算最终微波成像仪的灵敏度[8-9]。
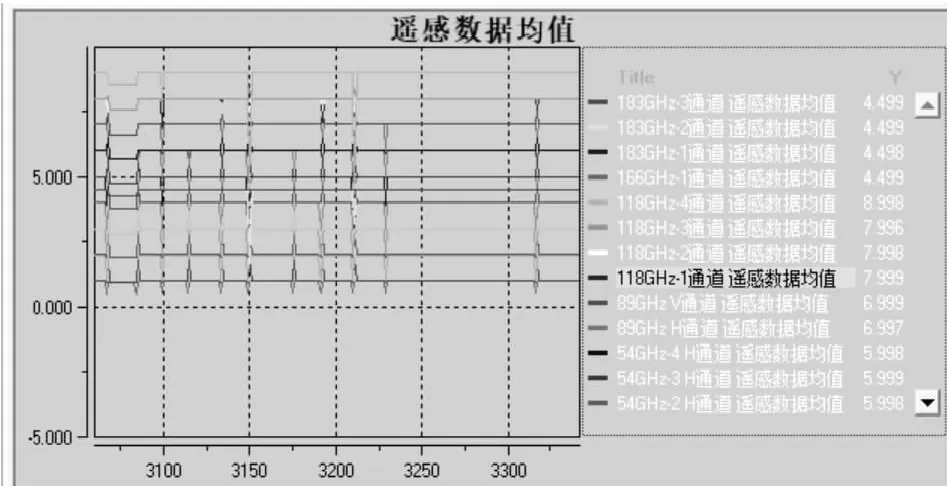
图11 各通道遥感数据均值Fig.11 Mean value of remote sensing data
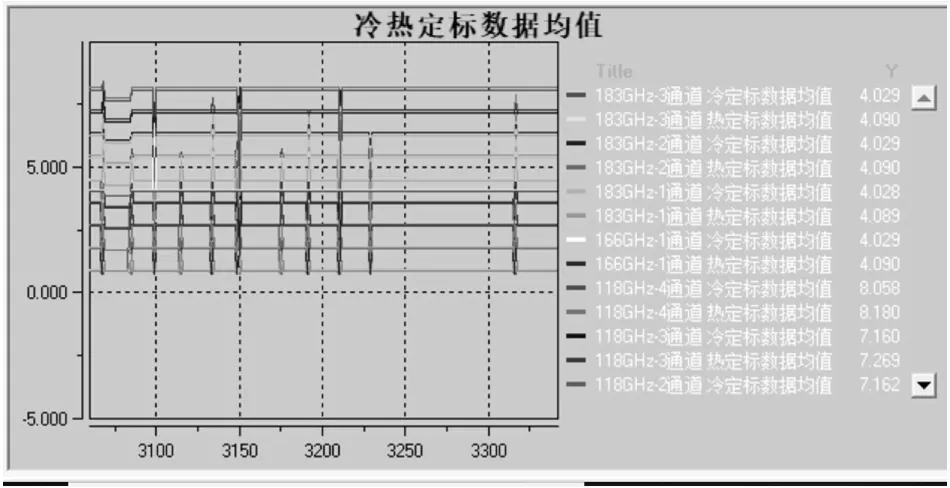
图12 各通道冷热定标数据均值Fig.12 Mean values of cold and heat calibration data
当各通道分别采集不同电压值时,其中第3 250到3 300包数据,中间通过注数改变采样间隔时间,不改变外界模拟输入的电压值。除去特殊工作模式,其采样的遥感、定标的均值也比较稳定。其余包的数据是改变外界各通道模拟输入电压,不改变采样间隔。
4 结论
本文提出了多通道并行可程控遥感数据采集系统。该系统实现多通道并行采集,采样起始时间可调、采样间隔时间可控的功能。试验结果表明,当各通道并行采集电压值大小一样的数据时,方差在0.3 mV左右,比较稳定。在各通道采集不同值时且外界模拟电压不变情况下,改变采样间隔前后的
均值也比较稳定。此遥感采集系统的设计适合同类的微波成像仪中。但是,此系统在设计过程中为了实现对每一通道采样起始时间和采样间隔可调,使用多片AD,占用较多板子面积。如何节约成本、减少体积和重量、实现小型化,可在后续进一步进行研究。
