环境减灾二号A/B卫星在轨定标模式设计与验证
2022-07-12朱军姚舜丛强白照广董筠马磊林军吕秋峰刘振海柴梦阳孙剑
朱军 姚舜 丛强 白照广 董筠 马磊 林军 吕秋峰 刘振海 柴梦阳 孙剑
(1 航天东方红卫星有限公司,北京 100094)(2 中国资源卫星应用中心,北京 100094) (3 北京空间机电研究所,北京 100094) (4 中国科学院合肥物质科学研究院安徽光学精密机械研究所,合肥 230031) (5 中国科学院上海技术物理研究所,上海 200083) (6 中国科学院西安光学精密机械研究所,西安 710119)
环境减灾二号A/B卫星是环境减灾一号A/B卫星[1]的后续卫星,也是环境减灾二号系列星座的首发星,于2020年9月27日由长征四号乙运载火箭在太原卫星发射中心,以一箭双星的方式成功发射入轨。两颗星技术状态一致,均搭载了16 m相机、红外相机、高光谱成像仪和大气校正仪4台光学载荷。16 m相机充分继承高分一号卫星16 m相机[2]的技术方案,在保持空间分辨率16 m、幅宽800 km不变的情况下,增加1个红边谱段,提升对地表植被生长特性识别能力[3];高光谱成像仪在环境减灾一号A卫星空间调制型傅里叶变换超光谱成像仪[4]基础上,采用时空联合调制干涉光谱成像技术,实现空间分辨率为48 m(可见近红外通道)/96 m(短波红外通道)、幅宽为96 km、平均光谱分辨率为5 nm(可见近红外)/10 nm(短波红外),拥有215个谱段;红外相机在环境减灾一号B卫星圆周扫描型红外相机[5]的基础上,采用摆扫成像方式,实现空间分辨率为48 m(可见至短波红外)/96 m(中波至长波红外)、幅宽为720 km,共有可见近红外至长波红外9个谱段;大气校正仪空间分辨率为6 km、幅宽800 km,包括可见近红外至短波红外9个偏振谱段,可探测与16 m相机同视场的水汽柱浓度(CWV)和气溶胶光学厚度(AOD)数据[6-7]。
目前,国内外光学遥感卫星在轨辐射定标主要集中于相对辐射定标,而绝对辐射定标受限于场地、人员、季节等因素定标难度大、过程复杂、周期长,无法实现高精度和高频次的定标[8]。通过卫星本身的能力在轨进行绝对辐射定标,可以有效避免上述问题。例如,美国地球观测卫星(EOS)上的中分辨率成像光谱仪(MODIS)就携带有漫反射板,通过卫星机动能力进行对日定标[9];美国的广角海洋水色观测任务系列卫星(SeaWifs)和我国的风云三号系列卫星也设计了通过对月观测监视星上载荷辐射响应的稳定性[10-11]。然而,由于环境减灾二号A/B卫星4种载荷成像体制各不相同,同时由于各载荷在轨成像过程中地表反射率、光照条件等成像输入条件复杂,在轨力学、真空和外热流等环境因素动态变化,实验室条件无法完全模拟各载荷在轨的工作状态,造成在各载荷地面预设成像参数无法展现最佳的成像效果[12],因此需要针对各载荷的定标模式整体设计和统一规划,获取准确的辐射、光谱和偏振等定标数据。
本文介绍了环境减灾二号A/B卫星设计的对日定标、对月定标、偏航定标和载荷内定标4种定标模式,并通过卫星姿态分析了定标模式的执行情况,最后对各定标模式的定标结果进行了说明。
1 定标模式设计
1.1 对日定标
在大气层外,选择太阳作为基准光源是很理想的定标源。通过对日定标器将太阳辐射引入星载遥感器并将太阳辐射调节到星载遥感器测量的动态范围内,对星载遥感器进行绝对定标,可对星载遥感器性能变化进行监测和校正[13]。卫星红外相机和大气校正仪的可见至短波通道均采用漫反射板进行对日定标。
红外相机上携带的漫反射板如图1(a)所示。红外相机对日定标选择在北极附近并即将进入阳照区时进行,通过卫星姿态机动,使卫星的+Z轴、-Y轴、+X轴与星日连线夹角分别成固定角度,卫星保持惯性姿态指向。随后红外相机漫反射板转至特定角度将太阳光引入焦面探测器,获取太阳定标数据。随后改变漫反射板角度,获取不同角度下的太阳定标数据。同时,红外相机为了保证卫星在轨期间对漫反射板的稳定性,避免漫反射板衰减对定标的影响,整个定标过程中比辐射计同时采集入瞳日光和漫反射板反射光强度,然后通过对比辐射计数据的长期监视,实现对漫反射板的稳定性监测。
大气校正仪上携带的漫反射板如图1(b)所示。
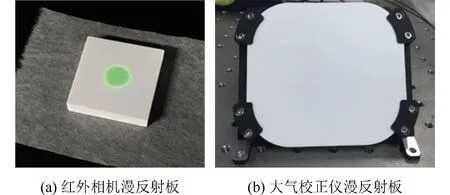
图1 对日定标漫反射板实物图Fig.1 Diffuse reflection board for sun-oriented calibration mode
大气校正仪为了避免漫反射板的衰减,对日定标选择在卫星出地影区约3 min后进行,同时根据太阳高度角、太阳方位角、定标时刻及卫星偏航角度,大气校正仪对日定标设计为卫星绕偏航轴姿态机动相应角度,使得漫反射板太阳观测孔对准太阳矢量,让阳光快速扫过漫反射板,采集对日漫反射数据,在完成在轨绝对辐射定标的同时,也避免了日光对漫反射板的长时间照射而导致的衰减。
1.2 对月观测
月球反射率的变化率约为每年10-8,其稳定的反射特性使月球非常适合作为卫星太阳反射通道的参考辐射基准源[14]。对月观测为近年国外光学遥感卫星采取的新型在轨定标试验模式,高分四号卫星[15]、高分六号卫星和高分一号B/C/D卫星[16]均在轨执行对月观测任务。
环境减灾二号A/B卫星针对16 m相机的5个可见近红外谱段以及高光谱成像仪的215个可见至短波红外谱段设计了对月观测模式,对月观测任务安排在地影区进行。卫星对月定标流程设计如下:首先根据月相角确定的卫星、地球和月球的惯性空间几何位置关系,然后通过卫星姿态机动,使卫星+Z轴指向目标惯性空间,受限于卫星的机动能力,卫星随后绕+Y轴以0.06 (°)/s固定角速度转动,使16 m相机和高光谱成像仪视场扫过月面,获取月面过采样影像。重复以上过程,在不同月份获取相同月相角下的月面影像,以分析和修正探测器在轨运行期间随时间变化的特性。具体过程如图2所示。

图2 对月定标观测设计Fig.2 Observation design of moon-oriented calibration mode
1.3 偏航定标
16 m相机、红外相机、大气校正仪幅宽为720~800 km,受地面定标场地面积限制,卫星推扫成像模式下,无法一次获取全视场辐射定标数据。参考高分一号偏航定标模式[17],基于16 m相机、红外相机、大气校正仪的探测器布局,设计三类有效载荷可见至短波红外谱段的偏航定标模式,通过卫星姿态机动,在单次成像任务中,获取全视场地面辐射定标数据。
16 m相机5个可见近红外谱段线阵探测器长度为12 000个像素,沿穿轨方向布局,通过棱镜分光实现同时观测同一地物。为了满足偏航定标要求,卫星绕偏航轴旋转90°,使探测器线阵与飞行方向平行,随着卫星飞行,探测器各像元依次对相同地物进行成像,获取偏航定标数据,如图3所示。成像区域选取了能够覆盖相机动态范围的层次比较丰富的景物,如冰川、沙漠、草原等。
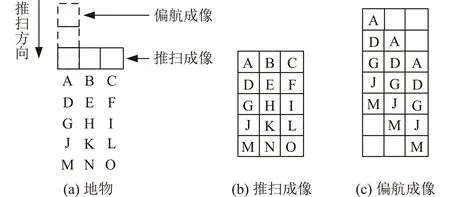
图3 16 m相机偏航90°定标成像原理Fig.3 Imaging mechanism of 16m camera 90°yaw calibration
红外相机6个可见至短波红外谱段线阵探测器长度为800个像素,排列方向平行于卫星飞行方向。在偏航定标时,卫星保持正常飞行姿态,将红外相机的摆镜定点指向成像区域,随着卫星飞行,红外相机6个线阵探测器上的所有像元依次分别对同一地物进行成像,获取偏航定标数据。
1.4 载荷内定标
为保证载荷在轨成像质量的稳定性,结合常规对地、对日定标,大气校正仪、红外相机和高光谱成像仪均设计了各自的内定标模式。
大气校正仪内定标包括偏振定标和暗参考定标,定标装置布局如图4(a)所示。偏振定标是指地物首先经过退偏器或偏振器扰偏或起偏成为标准零偏或线偏光,被仪器扫描观测,以获得载荷的偏振定标系数[7]。暗参考定标是指扫描镜反射面法线旋转至背向对地方向时,获取大气校正仪所需的零辐射信号及直流参考等暗参考数据。偏振定标和暗参考定标流程与正常成像观测模式相同,与正常成像模式同时进行。
高光谱成像仪内定标为光谱定标。光谱定标装置继承环境减灾一号A卫星超光谱成像仪的定标方案[18]。通过转动摆镜,分别将具有稳定吸收峰的钕玻璃和石英玻璃的定标光源引入可见近红外光谱仪及短波红外光谱主光路,以监测特征吸收峰对应的光谱位置变化情况。高光谱成像仪星上光谱定标原理如图4(b)所示。
红外相机内定标指的是针对B7~B9中长波谱段的星上黑体定标。相对于环境减灾一号B卫星红外相机采用两套黑体实现高低温两点定标[19],环境减灾二号A/B卫星红外相机采用1套黑体实现低端20 ℃与高端50 ℃两点定标。当卫星处于阴影区时,将黑体加热升温至50 ℃,摆镜转动指向黑体,开启中长波通道焦面电路采集黑体数据;停止黑体加热,待黑体降温至20 ℃,再次采集黑体数据。通过采集两个温度点黑体数据确定中长波红外通道的辐射定标系数。红外相机黑体定标成像原理如图4(c)所示。



图4 内定标原理示意图Fig.4 Self-calibration mechanism
2 在轨定标验证结果
2.1 对日定标
卫星分别于2021年3月11日和2021年3月12日进行了红外相机和大气校正仪对日定标试验(见图5)。

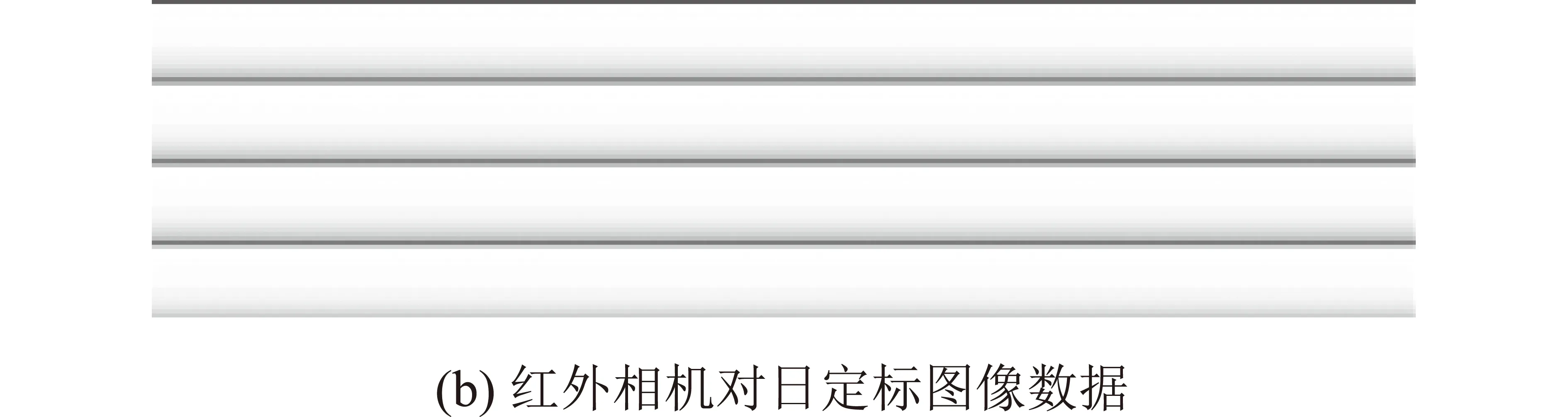
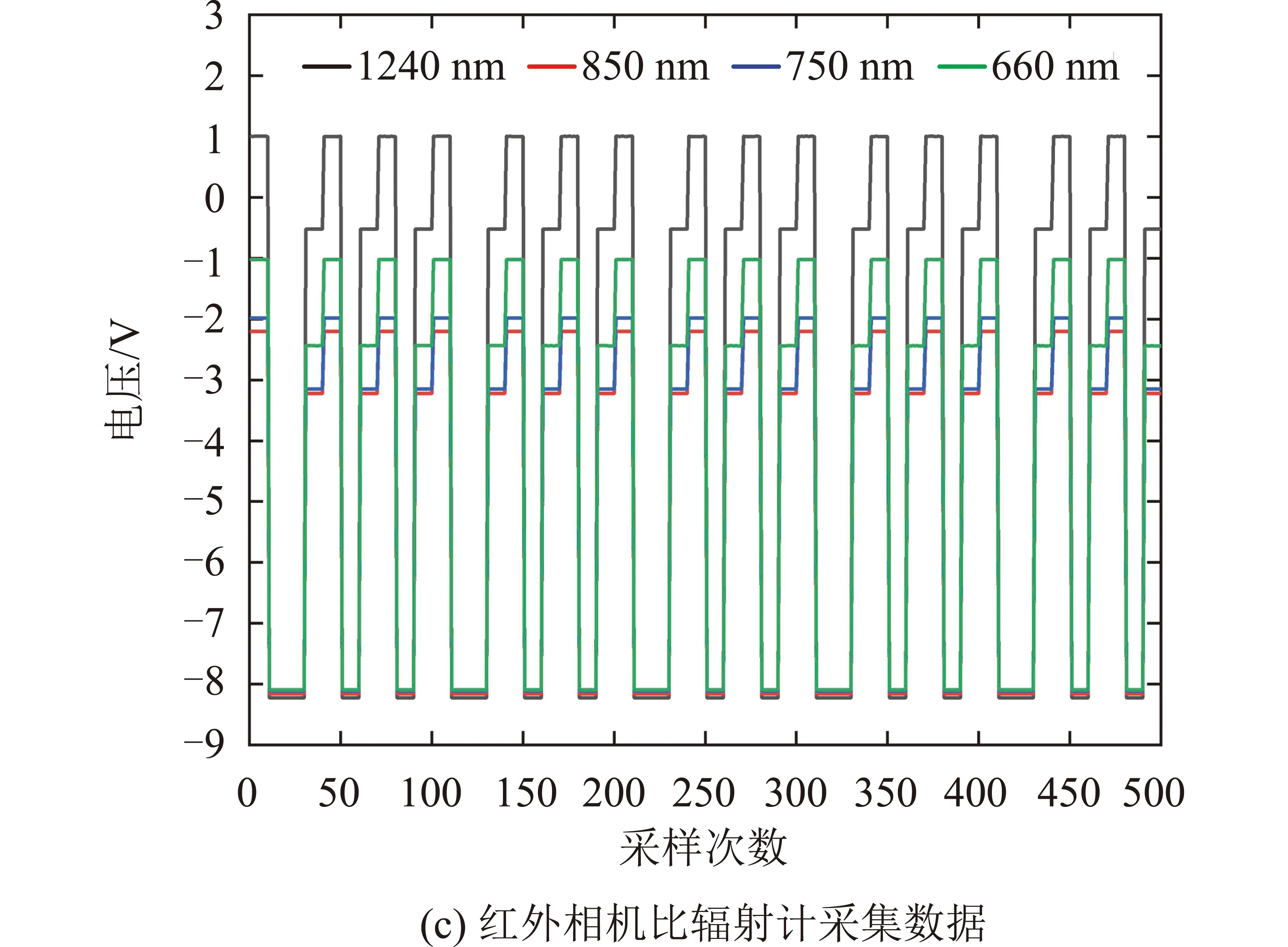
图5 对日定标数据Fig.5 Sun-oriented calibration data
大气对日定标过程采集的数据以及与太阳夹角关系如图5(a)所示。可以看出,大气对日过程中采集的数据稳定性较好,可以在后续定标算法中进一步的应用。红外相机对日定标获取的图像数据和比辐射计采集的数据如图5(b)所示。每颗星单次对日定标可以获得相机反射谱段B1~B5的4个扫描行的数据,每个扫描行的视场从左到右可以完整地扫过漫射板,且数据质量均匀稳定。之后结合实验室测量得到的漫射板双向反射分布函数(BRDF)数据,可以用于对红外相机反射谱段的绝对辐射定标。从图5(c)比辐射计采集的数据可以看出,比辐射计的各谱段在入光口、漫反射板和暗电平3个位置采集的数据稳定,一致性较好,可以作为漫反射板稳定性的参考依据。
2.2 对月定标在轨验证结果
卫星于2020年11月28日进行了对月定标试验。对月定标模式中,两颗卫星推扫姿态稳定度见表1,成像过程中整星三轴角度稳定度均在0.002°以内,满足成像需求。

表1 对月定标卫星姿态稳定度Table 1 Satellite attitude stability in moon-oriented calibration
在对月定标中,星上16 m相机和高光谱成像仪开机对月进行推扫成像,获取过采样月球图像数据,经过复原后,月球图像数据结果如图6所示。可以看出:16 m相机获取的月球图像完整清晰,高光谱成像仪获取的月球光谱连续稳定,可以用于对月球辐亮度及光谱的统计。后续对月定标模式将用以长周期监测星上载荷的辐射光谱变化情况。
图6 对月定标图像数据示意Fig.6 Moon-oriented calibration image data
2.3 偏航定标在轨验证结果
卫星在2020年11月13日进行了偏航定标试验。整星姿态偏航旋转90°后,同时进行偏流角修正,偏流角修正精度达到0.005°。在偏航定标中,16 m相机和大气校正仪开机成像。其中16 m相机获取偏航数据如图7所示,16 m相机获取的偏航图像清晰,纹理分明,可以用于后续16 m相机相对辐射校正处理。
图7 16 m相机偏航定标图像示意(B星相机2)Fig.7 16m camera captured image data in 90°yaw calibration (B satellite 16 m camera 2)
2.4 载荷内定标在轨验证结果
卫星在2020年11月25日在轨进行了红外相机黑体定标试验,中长波谱段对加热前后的定标黑体进行图像采集,并对温度的稳定性进行监视,结果如图8所示。可以看出,红外相机黑体在高温(323K)和低温(293K)端温度稳定性良好,且高低温图像均匀性良好,可以满足黑体定标模式的需求。
卫星在2021年3月30日在轨进行了高光谱成像仪光谱内定标试验,其中B星的结果如图9所示。从图9(a)、(b)干涉图中可以看到,干涉条纹纹理清晰,整个视场一致性较好;对比发射前后图9(c)、(d)的复原光谱中可以看出,定标光谱平滑连续,无噪声和毛刺,发射前后可见近红外通道和短波红外通道谱线的平均偏差分别为0.55 nm和0.82 nm,谱线一致性较好,因此高光谱内定标模式可以用于对高光谱成像仪光谱响应稳定性的测试依据。
图8 红外相机在轨黑体定标结果Fig.8 Infrared camera on-orbit blackbody calibration results
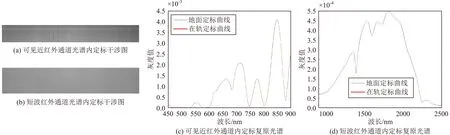
图9 高光谱成像仪光谱内定标结果Fig.9 HSI self-calibration results
3 结束语
本文对环境减灾二号A/B卫星的在轨定标模式设计及验证情况进行了介绍,覆盖了对日定标、对月定标、偏航定标和载荷内定标全部4种定标模式,并对各定标模式在轨执行过程中整星姿态机动情况和载荷定标数据获取情况进行了分析。设计的4种在轨辐射定标模式,可以有效解决卫星上不同成像体制和不同定标需求下的各载荷在轨辐射定标,实现各有效载荷互不干涉的情况下高稳定度和高精度的获取各类辐射定标数据,满足了卫星长期业务化运行所需的高质量遥感数据获取的需求。从姿态遥测中可以看出,卫星在各定标模式姿态全部按照设计要求进行了机动,且姿态稳定性较好;从各载荷获取的定标数据中可以看出,卫星各个定标模式设计合理可行,满足各载荷的定标需求。因此,环境减灾二号A/B卫星的在轨定标模式可以为其他卫星在轨定标模式设计提供一定的参考依据。但由于在轨测试时间有限,以及卫星定标模式较多,目前每个定标模式测试次数较少。因此,后续仍需要对各模式进行多次测试,挖掘各定标模式设计中可能存在的不足,从而在后续的定标模式设计中进一步地完善和改进。
