基于卧式转台的舵片滚转姿态控制*
2019-08-22邵伟平张嘉易郝永平裴乙橦
邵伟平,孙 林,张嘉易,郝永平,裴乙橦
(沈阳理工大学机械工程学院, 沈阳 110159)
0 引言
随着科学技术的飞速发展,在现代化战争中对制导武器的精确打击能力提出了越来越高的要求,致使二维弹道修正技术成为各国的重要研究方向,其中对舵机的滚转角控制是修正弹的关键,但是目前国内外对舵机的修正控制方法的相关资料非常少,其中主要有陀螺仪角度测量、光电式滚转角测量、MEMS加速度计滚转角测量、基于外辐射源照射滚转角测量等,这些控制方法存在一些不足。
文中使用发展前景非常好的地磁传感器角度测量方式,具有无积累误差、角度解算速度快、控制精度高等优点。通过半实物仿真平台,提出了根据舵机的不同转速,调节不同的PWM值对舵机进行逐步递减的减旋控制方法,并对该控制方法进行理论研究。
1 旋转舵机卧式转台工作原理研究与方案设计
1.1 实验装置结构
为了使二维修正机构高速旋转时更平稳,更接近于模拟弹丸飞行过程,故实验转台采用卧式转台,实验装置主要由伺服电机、联轴器、舵片卡具、舵机、支架、传动杆、滑环构成,如图1所示。伺服电机1使用力矩模式控制舵片转速,模拟风阻力矩,逆时针旋转;伺服电机2使用转速模式模拟弹丸转速,顺时针旋转。电机1通过弹性联轴器连接舵片卡具控制舵片旋转状态,电机2通过弹性联轴器连接滑环经过传动杆控制弹体旋转状态,在舵机和弹体同时旋转时,通过调节修正电机PWM值控制舵机的输出力矩,控制舵机的旋转状态,实现对舵机的修停控制。
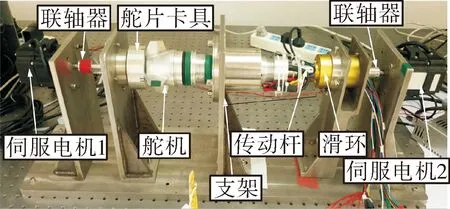
图1 卧式转台
1.2 实验装置的工作原理
启动双电机,舵机和弹体相对高速旋转,在平稳状态下,根据不同的风阻力矩,不同的弹体转速以及不同的PWM值,就可以得到舵机的不同运动状态。当舵机的控制力矩大于风阻力矩时,舵片顺时针旋转;当舵机的控制力矩等于风阻力矩时,舵片停止不动;当舵机的控制力矩小于风阻力矩时,舵片逆时针旋转。这3个条件在平衡状态下是相互关联的,当其中一个条件一定时,就可以得到另外两个条件的关系。通过分析研究PWM值、弹体转速、舵片转速、风阻力矩之间的相互关系,可以得到弹体滚转角与弹体和舵片之间转速差的关系,通过他们之间的相互关系,优化控制算法,从而达到更好的修正效果。
2 舵机转动力矩分析
在弹丸旋转稳定状态下,舵机的转动力矩与弹体的转速和修正电机的占空比之间存在一定的关系,所以可以通过调节不同占空比(即PWM值)的数值与不同的弹体转速,使舵片停止不动时,使用旋转测力计测出舵机输出力矩的变化情况。经过转台的大量测试实验,在不同占空比、不同转速下舵机转动力矩输出情况如表1所示。

表1 舵机输出力矩、弹体转速、占空比的关系
将表中的数据用Matlab绘制出相应的三维曲面图,如图2所示。
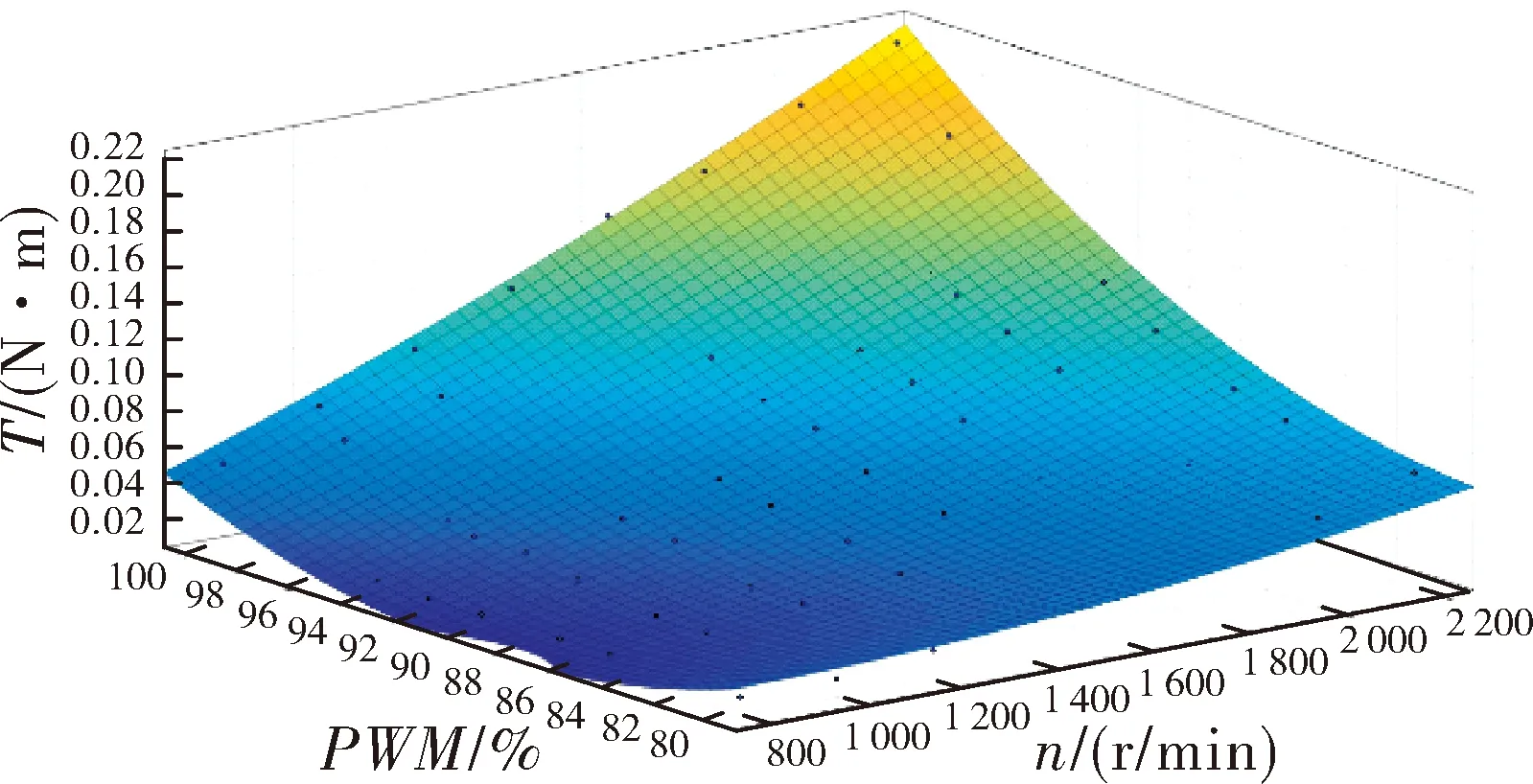
图2 舵机输出力矩关系图
根据图2,以转速和占空比为自变量,以输出力矩为因变量,拟合得出如下的函数关系式:
T=P00+xP10+yP01+x2P20+xyP11+y2P02
(1)
式中:P00=2.354;P10=-0.000 334 7;P01=-0.050 72;P20=1.469e-08;P11=3.959e-06;P02=0.000 270 5;x为弹体转速(r/min);y为占空比;T为舵机输出力矩。
通过分析可以看出,当弹体转速一定时,力矩随占空比变大而变大;当占空比一定时,力矩随弹体转速变大而变大。从拟合的关系式中可以看出,已知弹体转速和舵机的输出力矩就可以得到此时修正电机的占空比即PWM值,通过舵机的输出力矩与风阻力矩之间的相互关系可以得到舵机的不同运动状态,当舵片停止不动时,弹体和舵机之间的转速差对应着一个相应的PWM值,反过来可以通过地磁传感器和光电传感器测得舵机和弹体之间的相互旋转时的转速差,从而可以得到预定的PWM值,也就是说可以通过对PWM值的调整进而对舵机进行高速减旋、低速减旋以及修停动作。
3 舵机滚转角测量与控制过程
3.1 舵机的角度解算
文中使用单片机STM32进行信号处理与实时解算。通过地磁传感器输出的电压幅值信号,利用高斯公式解算这些电压幅值得出弹体滚转角度。采样电压在0~3.3 V之间。采用双轴采样信号解算弹对地转速与转角。
双轴地磁采集的X轴和Z轴的模拟电压幅值,如图3所示。

图3 双轴地磁信号
弹体的滚转姿态即为弹体坐标系沿弹轴旋转的角度也即是在垂直于弹轴的平面内弹轴坐标系和弹体坐标系的夹角,如图4所示。
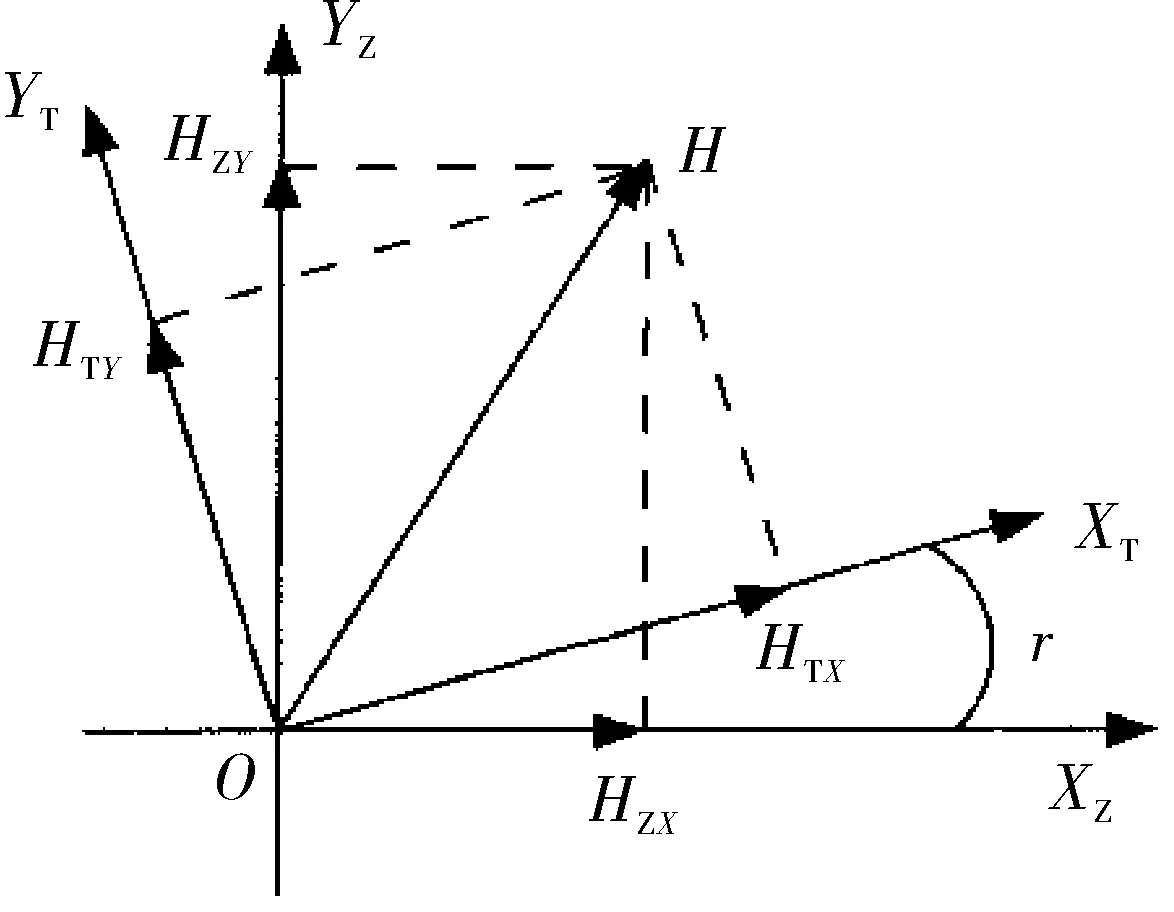
图4 滚转姿态分析
可得弹体的滚转姿态即为弹体的滚转角γ:
(2)
弹体与舵机相对高速旋转,弹体的滚转角通过光电传感器得到与之对应的舵机滚转角,舵机匀速旋转时的角度值是360°~0°循环,如图5所示。
当舵机在匀速旋转时进行修停一次后再继续匀速旋转,这时舵片的角度值变化如图6所示,在修停时,舵片的角度保持不变,此时的舵机转速为零。
3.2 舵机的高速减旋、低速减旋、修停
当弹丸出炮口时,弹体高速飞行,舵机高速旋转,如果此时进行修停动作易使弹体失稳,而且修停效果不好,所以一般先进行高速减旋,飞行稳定以后,再进行低速减旋,在低转速下对舵机进行修停控制。首先将高速旋转的舵机进行速度控制,使其对地转速保持在5 r/s左右,并匀速旋转。利用地磁传感器和光电传感器测得舵机和弹体之间的相互旋转时的转速差n以及弹体自身的转速m,此时可以解算出舵机对地的转速N。通过调节PWM值来控制修正电机的输出力矩,从而控制舵机的转速N。设一个提前想要控制的舵机转速值W,如果N

图6 舵机修停一次的滚转角的变化
总而言之,舵机的高速减旋、低速减旋以及修停等动作是可以通过调节PWM值进行控制的,控制过程如下:
求舵机对地的转速N(r/s):
T=T2-T1
(3)
(4)
T1为弹体对地旋转周期,T2为舵片对弹体旋转周期。

图7 舵机减旋控制流程图(N的单位为r/s)
首先对高速旋转的舵机进行高速减旋,通过PWM值调节使其对地转速保持在5 r/s,接着再对其进行低速减旋,使其保持在1 r/s。当控制系统给出停止指令后,舵机转过预定的停止角度时可以通过减旋自然停止,同时在到达预定停止角度前,分析当前角度值α与预设停止角度值β,在α<β-10°或者α<β+10°时,对舵机增加一个小的反向力矩来平衡舵机的转动惯量,使之停止更快更平稳。反向力矩可以用增加适合的PWM值来代替。
当控制系统程序设置停止角度分别为180°、10°、250°、0°时,经过滤波处理得到如图8所示:首先弹体在前150转时,舵机高速旋转,此时角度变换非常快,角度曲线密集,在150~1 050转时,经过高速旋转、减旋过程,到1 050转舵机开始修停,第一次舵片停在180°附近,弹体持续旋转900转后,舵片缓慢逆时针旋转至10°附近停止,弹体再持续旋转900转后,舵机逆时针缓慢旋转至250°附近,最后在0°附近停止。由于舵片停止不动时存在误差,会出现左右轻微摆动,0°又在与360°的交接处,所以会出现非常密集的0°到360°曲线。
4 结论
文中设计研制了适应旋转舵机的卧式转台,对实验装置的总体结构布局进行了分析,装置中利用实验转台双电机,真实模拟弹丸飞行控制过程,真正做到半实物仿真。针对旋转舵机进行模拟控制研究,通过采用地磁传感器对舵机滚转角进行精确测量,分析PWM值、弹体转速、舵片转速、风阻力矩之间的相互关系,通过对PWM值的调节,控制舵机的输出力矩,根据舵机与弹体的相对转速差对舵机进行减旋、制动控制。根据大量的实验数据分析,舵机停止不动时最大角度误差在7°,属于实验可接受范围内。可以利用该平台,对舵片转动惯量计算、控制响应时间推算和修正控制快速响应特性等进行分析,优化对修正弹的控制算法,使之更为精确。

图8 舵机修停4次时滚转角度的变化
