多机协同探测传感器管理*
2019-08-22许蕴山夏海宝王俊迪
王 楠,许蕴山,夏海宝,王俊迪
(1 空军工程大学航空机务士官学校,河南信阳 464099;2 空军工程大学, 西安 710038)
0 引言
在空战中,形成空中优势与夺取制空权是现代空战主要的两大任务,其中,增大作战体系的最大同时攻击目标数目与最大同时跟踪目标数目是作战体系的关键需求[1],机载传感器作为获取战场信息的关键装备,能否对其进行有效管理以满足作战体系攻击与跟踪需求,成为多机协同作战体系信息获取的关键所在[2]。文中针对典型的多机协同作战传感器系统应用问题进行研究,为完成多机协同作战任务提供支持。在多机协同作战传感器管理中,首要问题便是根据具体的作战任务分解出机载传感器的具体任务[3],传感器任务主要包含:
1)达到待攻击目标的跟踪精度要求;
2)存在威胁目标的稳定跟踪精度要求;
3)保持对新生目标的及时发现。
多机协同作战传感器管理是多传感器系统管理的一个重要应用,在现代空战环境中综合管理各个传感器并使之形成高效的传感器系统是该应用的重要研究内容。文献[4]研究了传感器管理的结构与微观传感器管理,就形成了当前比较常用的宏观/微观式双层结构,但并未给出总体的管理框架。文献[5]针对传感器资源有限的问题,建立了传感器目标的代价函数矩阵,进而利用线性规划的方法对所跟踪目标进行传感器资源的最优分配,缺乏分配完成后传感器自身的资源管理。
文中将传感器管理的输入信息,即当前状态划分为平台状态和传感器信息状态,并根据两类状态输入,结合线性规划以及MAB模型的UCB算法进行传感器的协同控制,最终给出基于当前状态的传感器管理优化算法。

图1 系统管理框架
1 多机协同作战场景分析
Alfred O. Hero III在文献[6]中指出,用控制论的观点可以将传感器管理看作是在优化控制一个状态,通过选择测量策略,选择出离散信息以及传感器组合,把控制对象分割为物理动态和信息动态。如图2所示。
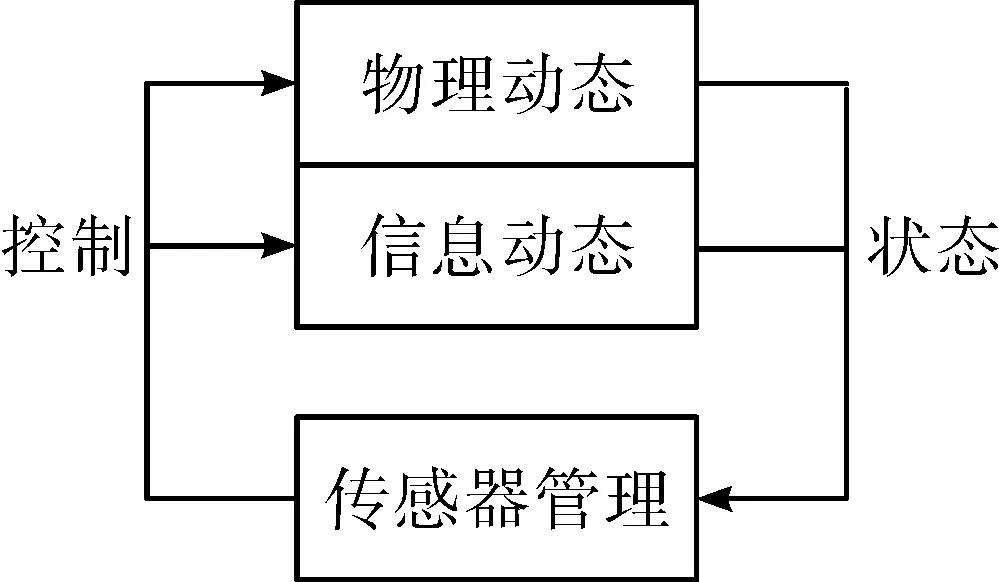
图2 动态控制
文中借鉴该思想,将传感器平台的运动变化考虑为物理动态,传感器与目标之间的信息交互看作信息动态。着眼于两类动态的巨大差异,才相应的提出了该双层优化管理方法。
两个层次其内涵分别是空时划分与资源管理,其中空时划分是基于当前空中各平台的位置或运动状态即物理动态进行划分的,相较于文献[7]分配对象增加了时间资源的划分,由于平台状态的变化相对较慢,因此划分是在静态状态下完成优化的;而传感器资源管理是建立在当前传感器与目标的信息交互状态上的,其管理时间往往是毫秒级的,因此在资源管理的时间维度上,可以认为空时划分是静态的,在获得空时划分结果后,再进行相应的资源管理。
2 传感器管理模型
2.1 模型基础
首先对与传感器管理相关场景所包含的各类变量进行说明,如表1。

表1 变量说明
假设条件:
1)将区域边缘划分为若干个检测单元,只考虑目标可能出现在边缘检测单元的检测问题,通常区域内的检测性能肯定好于边界;
2)在物理动态更新的周期T内,新目标始终在一个检测单元之中;
3)只考虑传感器获取信息功能,未考虑隐蔽与抗干扰问题。
2.2 物理动态控制
2.2.1 任务需求
根据传感器自身任务需求,传感器必须在满足攻击或跟踪目标的精度要求的条件下,保持较高的新生目标发现性能。在一个物理动态周期内,目标或检测单元的信息增益与传感器在周期内耗费在其上的时间成正比。优化模型可以表示为下式:
y= min(ζn)

2.2.2 控制策略
通过调整传感器与目标之间的信息交互时间来完成最优化目标信息获取水平。下面就是算法步骤:
输入:L,S,G,A,K。
步骤:1)确定pij,qin;2)根据任务K,确定各个目标的跟踪精度要求ρ0;3)优化得到当前物理条件下的传感器,目标区域的空时划分。
输出:分配结果τij,τik。
算法的主要部分在于第三步的优化部分,该优化问题可以看作线性优化问题:
可以将该线性优化问题转化为标准的线性规划问题。
2.3 信息动态控制
根据当前的物理状态,优化获得了传感器与目标的空时分配,得到了各个传感器在一个物理状态周期内的时间任务分配结果,下面就是要根据该结果来完成各个传感器的资源管理。图3就是总体的传感器管理流程图。

图3 传感器管理流程
关于传感器资源管理部分,文献[8-9]都进行了一些研究。文中主要利用MAB模型[10-11]对波束控制进行描述,进而采用UCB指数方法[12]完成模型的应用。在完成雷达目标搜索时,首先将待探测空域划分为m个波束位置,进行一轮均匀搜索,据此得到初始的波位UCB指数,然后根据UCB指数进行波束的控制,根据UCB指数的策略,波束会倾向于回波幅度较高的位置,最终稳定在回波幅度最高的波位[13-14],根据脉冲积累原理[15],雷达会在目标存在的地方获得更强的回波信号,从而积累得以发现目标。
3 模型仿真
3.1 空时划分仿真
设置传感器与目标之间的单位时间探测信息交互量(表2),即pij。并且目标1~3的任务设置为稳定跟踪目标,目标4为待攻击目标。

表2 传感器目标信息交互 s/km2
根据任务得到单位时间目标的任务需求见表3。

表3 目标任务设置 1/km2
根据线性规划得到传感器目标在单位时间内的划分结果见表4。
在空时划分层,各个传感器得以在其最佳区域发挥优势,在二者性能所差无几的目标则共同完成其探测。
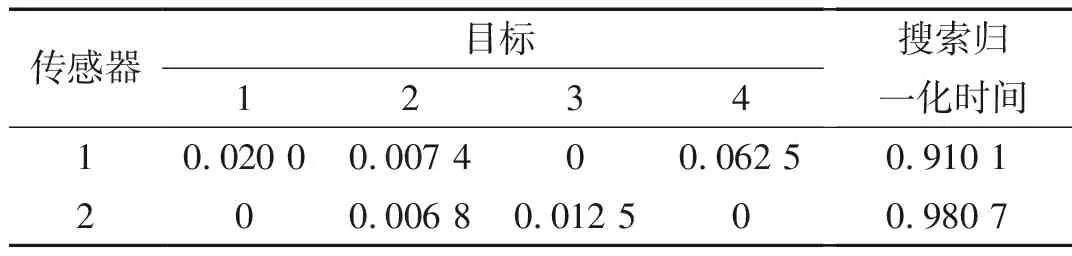
表4 优化结果
3.2 资源管理仿真
设置目标回波水平在杂波为高斯分布条件下,图4是目标回波归一化幅度为1~2时,雷达发现目标时刻目标出现波位与其他波位更新次数的比值(除去首次均匀搜索的一次)。
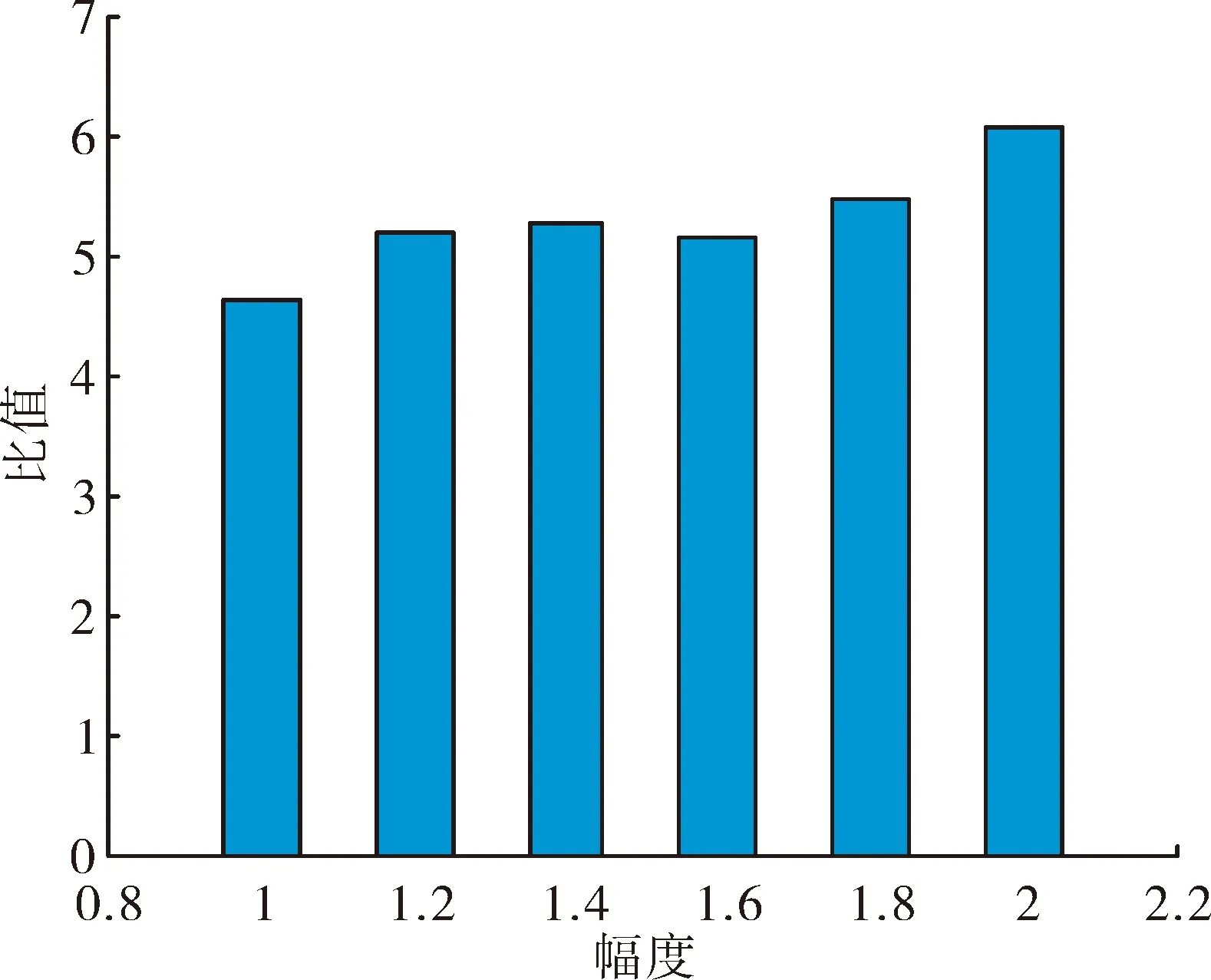
图4 波束更新时间比
由此可见在未发现目标之前,雷达将波束控制在目标存在区域的时间大约是其他波位的5倍,这与波束搜索策略的目的要求是一致的。接下来按照表5设置雷达工作环境与参数。
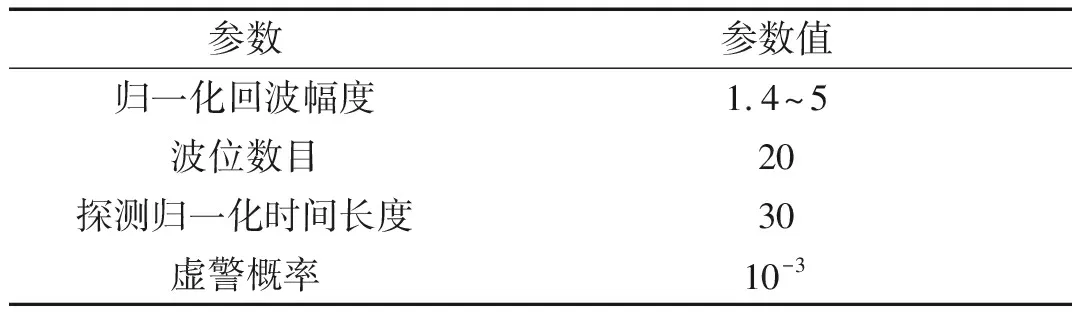
表5 参数设置
下面在雷达的目标发现概率和目标发现效率两个方面,将该方法与其他方法进行对比,主要是贪婪算法[16]和UCB-V指数[17]方法。文中的贪婪算法的具体设置是,仅仅更新探测当前目标回波幅度最高的若干个搜索单元,而不采用UCB指数。N=1代表每次更新仅仅检测回波幅度最高的一个波位单元,N=2表示每次更新检测回波幅度最高的前两个检测单元,该方法属于无随机探索的贪婪算法。结合文献[17]提出的带方差信息的UCB-V方法进行对比。
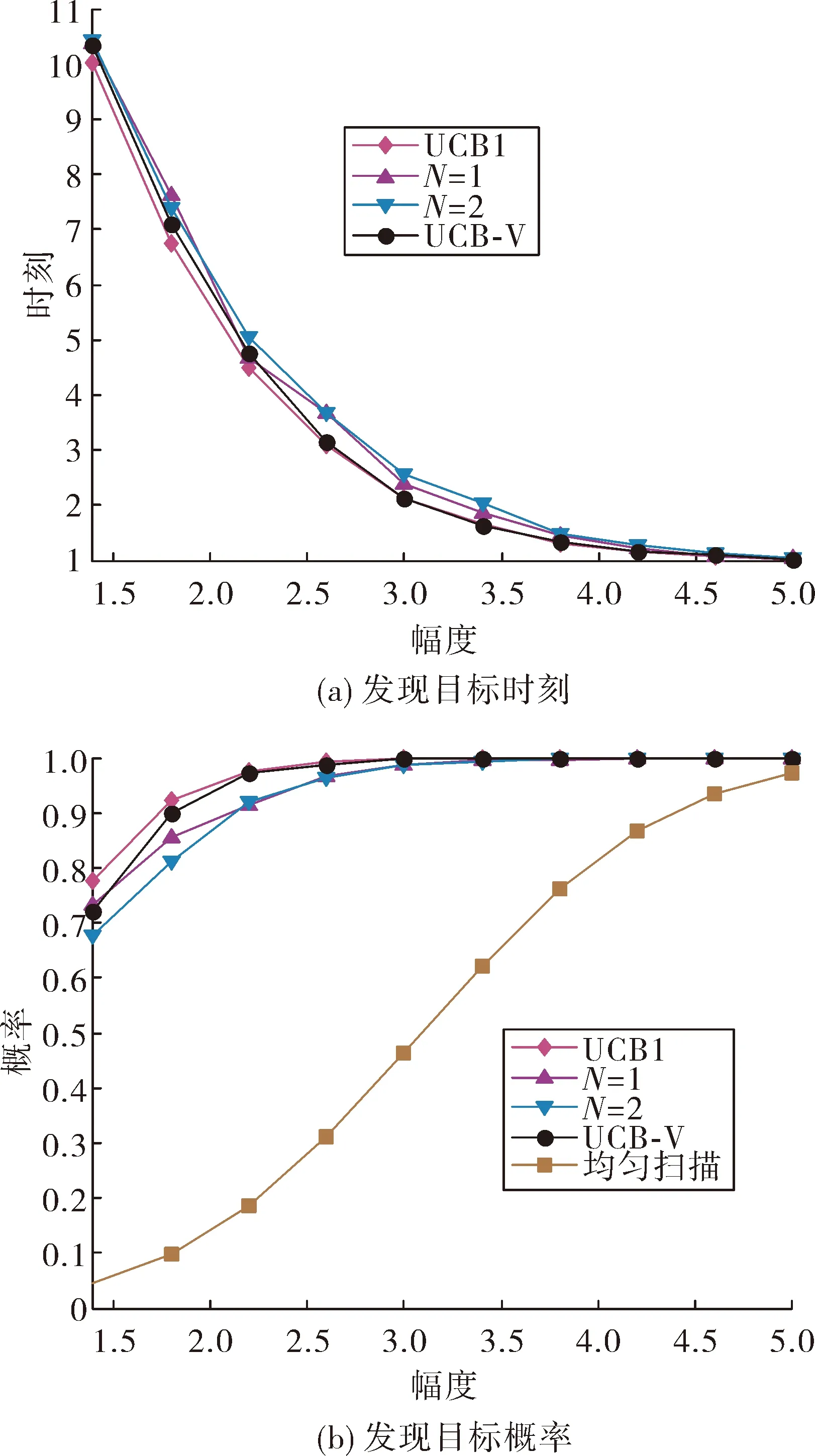
图5 目标搜索情况
在基于信息动态的资源管理中,各个传感器不断根据当前回波信息调整搜索策略,将更多资源配置于目标存在概率大的区域,使得雷达目标发现概率明显提升,获得同样的目标发现概率,文中提供方法较原先的均匀扫描方法对目标回波幅度的要求更低,降低幅度至少为噪声标准差的3倍。在功率上,该值对应的信噪比水平约为10 dB。
4 结论
文中针对多机协同传感器系统的工作方式进行研究,结合物理动态与信息动态将多机协同传感器管理划分为两个层次:空时划分层与资源管理层。从而将系统管理问题转化为两级数学优化问题,有效降低了系统的复杂度。仿真结果表明传感器可以协同有效完成任务,并通过资源管理提升传感器应用水平,在搜索状态下,发现目标功率信噪比较原先降低10 dB以上。
