改进行列式星座选择算法在无缝定位系统中的应用研究*
2019-08-22付承彪田安红张顺吉范全润宁德琼
付承彪,田安红,张顺吉,范全润,于 龙,宁德琼,董 婧
(曲靖师范学院信息工程学院,云南曲靖 655000)
0 引言
在建筑密集的城市、峡谷、地下停车场等区域,单卫星定位系统因信号受到遮挡而出现定位失败的现象。目前,无线定位系统趋向于融合多个信号源形成组合定位系统[1-2]。因中国自主研发的数字电视地面广播[3]系统传输标准(DTMB),具有达到1m的高定位精度、信号强度大、易穿透障碍、信号覆盖范围[4-5]广等优点。文中提出基于GPS/北斗/DTMB的无缝定位系统,实现户外,城市和室内的定位,解决单卫星系统的盲区问题。几何精度因子(GDOP)值[6]一直以来作为衡量卫星导航定位精度的一个主要参考,是研究导航定位中星座选择算法的根本出发点。然而,参与定位的信号源越多,越能提高定位精度,但定位系统的计算复杂程度也相应会增大,在平衡计算量和精度时[7],应遵循当定位精度满足一定场景的定位需要时,减少接收机的计算负担。

1 无缝定位系统的改进星座选择算法
1.1 无缝定位系统
依据移动终端的位置信息,设计3种模式的无缝定位区域:户外、城市、室内。以接收的GPS卫星数目作为不同区域判断标准,方案如表1所示。
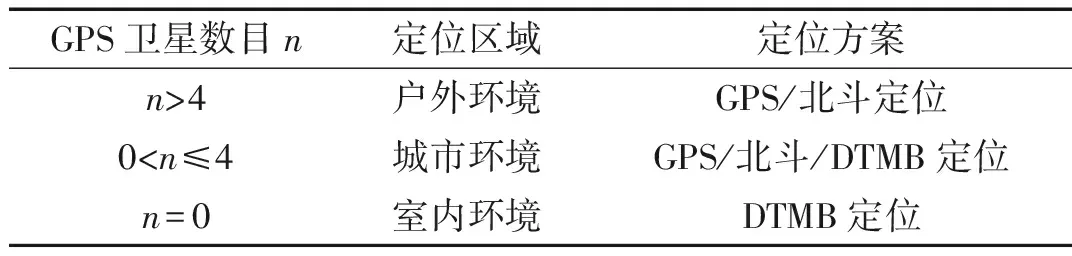
表1 无缝定位方案
针对户外环境中,基于GPS/北斗的组合定位方程表示如下:
(1)
针对城市环境中,基于3种信号源GPS/北斗/DTMB的组合定位方程表示如下:
(2)
针对室内环境中,基于DTMB的定位方程表示如下:
(3)
式中:ρi为伪距值,(xw,yw,zw)为接收机的位置;(xi,yi,zi)为第i颗GPS卫星或北斗卫星或DTMB电视塔的位置坐标信息;c为光速。ag=c·ΔtS,ab=c·ΔtBD,ΔtS和ΔtBD分别为GPS和北斗系统的时钟偏差。a1、a2、a3分别为GPS卫星信号、北斗卫星信号、DTMB信号的钟差偏移量,a1=c·ΔtS,a2=c·ΔtBD,a3=c·ΔtB。bt=c·ΔtB,ΔtB为DTMB定位系统的时钟偏差。
式(1)中,当卫星信号为GPS时v1=1,v2=0;为北斗卫星时v1=0,v2=1。式(2)中,当卫星信号为GPS时v1=1,v2=0,v3=0;为北斗卫星时v1=0,v2=1,v3=0;为DTMB时v1=0,v2=0,v3=1。
1.2 无缝定位系统中的行列式星座选择算法
以城市环境为例,将方程(2)表示成矩阵形式为:
(4)

在GPS/北斗/DTMB的无缝定位系统中,存在3个不同的信号源定位系统,加权几何精度因子GDOPW表示为:
(5)
式中:
θi为GPS信号或北斗信号或DTMB信号的伪距测量所对应的误差方差。

1.3 无缝定位系统中的改进星座选择算法
在文中的无缝定位系统中,基于行列式值的改进星座选择算法具体步骤如下:
第一步:因行列式绝对值增加时,GDOPW的取值整体上的变化减少,可见,某组合卫星的行列式绝对值相对较大时,对应的GDOPW值就较小。因此,选择出K组信号源,这K组组合保证是最大的K组行列式绝对值。
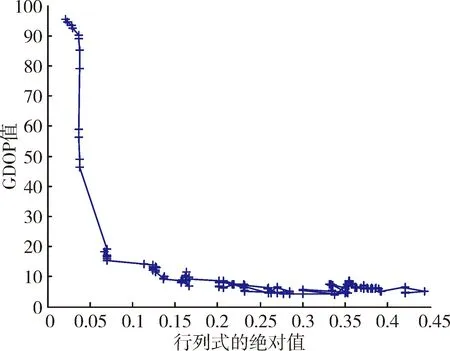
图1 行列式绝对值与GDOP值的关系
第二步:因图1中的对应关系非单调减少,则进一步从K组信号源中计算对应的GDOPW值,理论上,这个最小的GDOPW值所对应的信号源组合,即为最优的组合信号源。
综上所述,无缝定位系统中的基于行列式的改进星座选择算法的流程如图2所示。
2 仿真结果与分析
2.1 定位精度比较
对比分析16组和12组不同信号源组合的定位精度效果,如图3和图4所示。在该仿真图中,横坐标表示相对比值大小,纵坐标表示相对比值的百分比。所占百分比的求解过程为:假设采用传统最小GDOP星座选择算法,计算所得的几何精度因子用HGDOP,min来表示。假设采用改进行列式星座选择算法,计算所得到的几何精度因子用Hhls来表示。则改进行列式星座选择算法与传统最小GDOP星座选择算法之间的偏差百分比可以表示为:(Hhls-HGDOP,min)/HGDOP,min,该表达式表明:以传统最小GDOP星座选择算法为标准,在HGDOP,min取定值的情况下,Hhls越大时,计算所得百分比就大,即表明改进行列式星座选择算法与传统最小GDOP星座选择算法之间的偏差大。
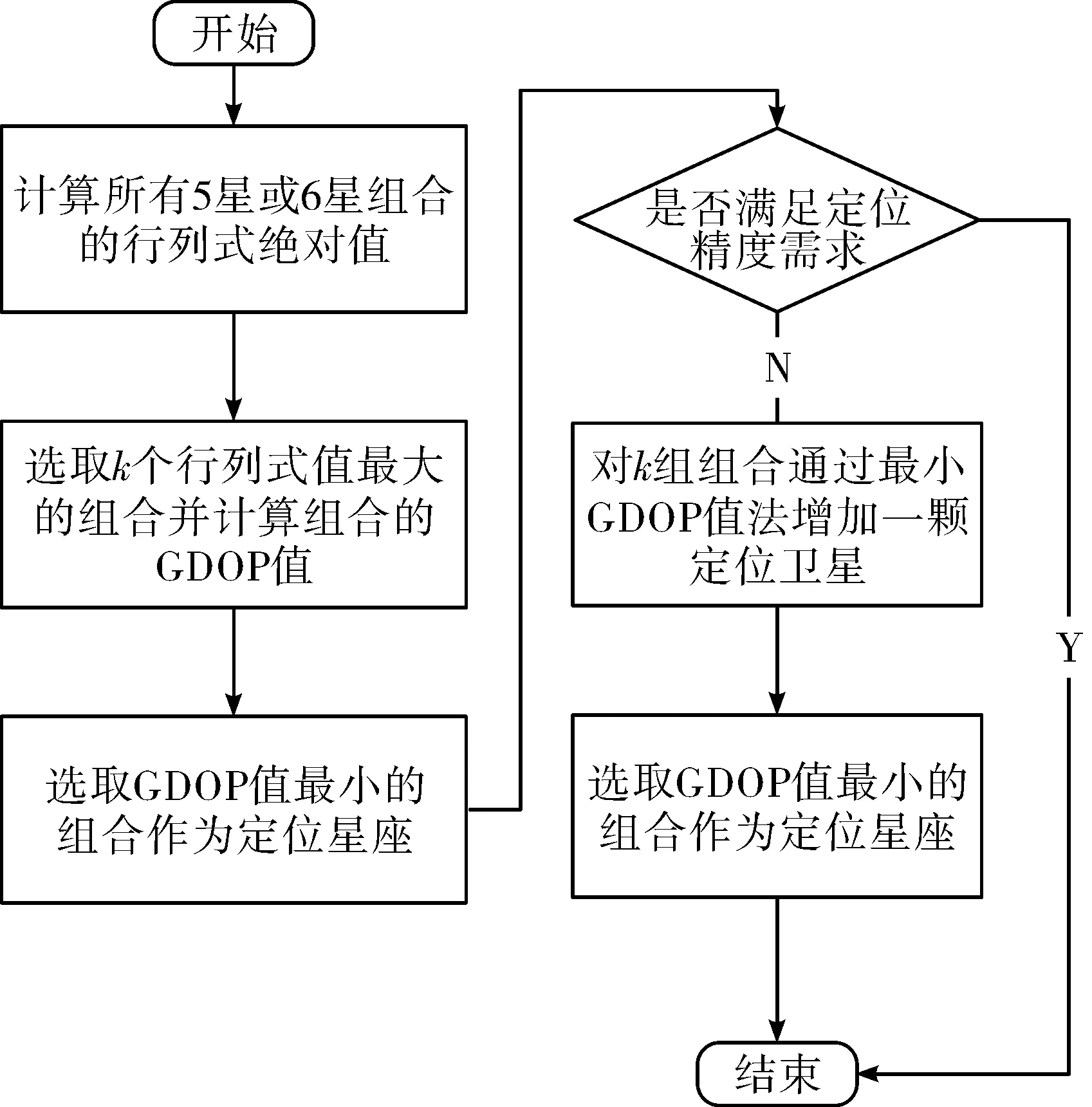
图2 改进的行列式星座选择算法

图3 N=16的定位精度

图4 N=12的定位精度
由上述分析可知,计算复杂度的大小取决于N值的大小,当N越大,则精度越高,但计算越复杂。反之,当N越小,则精度越低,但计算越简单。由图3可知,当采用16组组合卫星时,偏差小于0.15的相对百分比在95%左右,偏差小于0.05的相对百分比在88%左右,偏差小于0.03的相对百分比在85%左右。由图4可知,当采用12组组合卫星时,偏差小于0.15的相对百分比在90%左右,偏差小于0.05的相对百分比在75%左右,偏差小于0.03的相对百分比在68%左右。仿真结果说明,当N=16时,偏差小于0.1的百分比在92%左右。而当N=12时,偏差小于0.1的百分比在88%左右。说明了当N越大,则精度越高,反之,当N越小,则精度越低。但在N取值合适的情况下,改进的行列式星座选择算法能够得到可靠的定位精度。
2.2 计算时间长短比较
图5 定位时间比较
图5的仿真结果表明,在210种组合中,改进的行列式计算时间远远小于传统最小GDOP的计算时间,行列式星座选择算法在0.023 s上下波动变化,GDOP星座选择算法在0.035s上下波动变化,两者相差0.012 s。从而说明了改进的行列式星座选择算法的优势。
2.3 计算复杂程度比较
结合表1分析可知,在户外环境中,当采用GPS和北斗组合定位系统时,共有5个未知参数,即三维位置坐标和两个系统时钟。在城市环境中,采用GPS,北斗和DTMB的组合定位系统时,共有6个未知参数,即三维位置坐标和3个系统时钟。在室内环境中,采用DTMB定位系统,共有4个未知参数,即三维位置坐标和一个系统时钟。在同一历元时刻,一般可以同时观测到10颗左右的卫星信号。因此在分析运算复杂度时,分别选择10、11、12、13、14个信号源,对比分析在户外环境和城市环境中的运算复杂度,户外环境中,存在5个未知数,如表2所示。城市环境中,存在6个未知数,如表3所示。
表2 户外环境中的运算复杂度比较

表3 城市环境中的运算复杂度比较
由表2可知,假设为10颗信号源,传统GDOP方法计算中所涉及到的乘法和求逆,达到252次,行列式计算为0次,但改进选星方法计算中所涉及到的乘法和求逆,只有N次,行列式计算为252次。假设为14颗信号源,传统GDOP方法计算中所涉及到的乘法和求逆,达到2 002次,行列式计算为0次,但改进选星方法计算中所涉及到的乘法和求逆,只有N次,行列式计算为2 002次。
由表3可知,假设为10颗信号源,传统GDOP方法计算中所涉及到的乘法和求逆,达到210次,行列式计算为0次,但改进选星方法计算中所涉及到的乘法和求逆,只有N次,行列式计算为210次。假设为14颗信号源,传统GDOP方法计算中所涉及到的乘法和求逆,达到3 003次,行列式计算为0次,但改进选星方法计算中所涉及到的乘法和求逆,只有N次,行列式计算为3 003次。
很明显,N远远小于表2中的252和2 002,N远远小于表3中的210和3 003,N也小于表2和表3中其余信号源组合下涉及到的乘法和求逆次数。证明了改进行列式星座选择算法的优势,其运算复杂程度小于传统最小GDOP星座选择算法的运算复杂程度。
2.4 几何精度因子比较
改进的行列式星座选择算法在不同组合系统中的GDOP值对比效果如图6所示。
图6 GDOP值对比效果图
从图6知,在83个观测时刻内,对每种组合系统下的几何精度因子仿真对比分析,发现基本上趋向于这样的规律,即COMPASS>GPS>GPS+COMPASS>GPS+COMPASS+DTMB,北斗COMPASS系统GDOP值最大,在2.5左右,GPS、北斗和DTMB 3种组合系统的GDOP值最小,在1左右。说明组合信号源增多时,几何精度因子逐渐变小,定位精度越高。
3 结论
文中由GPS、北斗和DTMB的定位原理入手,建立了3种区域环境的无缝定位系统方程,接着从GDOP的表达式着手分析了行列式值和GDOP值的内在联系,并由此引申出基于改进行列式值的组合星座选择算法,分析了该算法步骤和优点。最后通过仿真证明了改进行列式星座选择算法的优势,如定位精度更高,计算时间更短,计算复杂度更低,几何精度因子更小。仿真结果证明改进行列式选星算法在无缝定位系统中可行。
