鞍座高度对骑行时下肢三关节做功模式的影响
2019-08-21王勇梁雷超汤运启黄灵燕伍勰刘宇
王勇 梁雷超 汤运启 黄灵燕 伍勰 刘宇
1 上海体育学院运动科学学院(上海200438)
2 聊城大学体育学院(山东聊城252000)
3 上海健康医学院康复学院(上海201318)
4 陕西科技大学设计与艺术学院(西安710021)
骑行中的关节做功模式研究用途广泛,例如,用骑行中人体生理能耗与机械功之间的差异来评价骑行效率[1]、利用骑行某阶段内的正、负功判断肌肉收缩模式[2],以及骑行中下肢三关节做功差异来探索环节间的相互作用等[3]。自行车运动是一种典型的闭链运动[4],能量从髋关节传递至膝关节,再传递至踝关节,最终由踝关节传递至踏板。Broker[5]和Zajac[6]认为,在这一过程中,髋关节、膝关节主要产生能量,踝关节仅仅负责能量的传递。研究证明,当关节净力矩与关节角速度一致时关节功率为正值,关节肌群向心收缩做正功,这意味着肌肉产生能量并向肢体传递;当关节净力矩与关节角速度不一致时关节功率为负值,关节肌群离心收缩做负功,体现着能量由肢体环节流向肌肉,肌肉吸收能量[7-8],这些能量在肌肉与环节间的相互流动保证了任务的顺利完成[9]。
骑行任务是下肢三关节协同完成的,为完成某一特定任务,三关节必须相互协调,才能保证任务的完成[10-12]。近年来,关于关节做功贡献度(contribution,Con)可以用来评价环节间的协调,并为训练计划提供重要信息的相关研究越来越多。骑行中Con的研究常见于频率、负荷以及鞍座高度的变化对其的影响,Ericson等[13]的研究认为,负荷的增加没有影响下肢三关节的Con,频率的增加会增加Con膝但会减少Con髋;Bini 等[14]的研究认为,随着座高的增加,Con踝增加,Con膝减少,但这些研究均采用一个完整踩踏周期内的净功,而没有进行分期,仅仅考虑一个周期的净功,缺少不同时相内各关节做功的具体情况,也就不能更加具体地了解不同时相内各关节间的协调模式[15]。此外,对正、负功变化的研究有助于加深对骑行中下肢三关节运动模式及其代偿机制的理解[8]。
目前既能提高运动成绩又能降低损伤风险的最佳鞍座高度还不得而知,对骑行中下肢各关节做功贡献度的研究有助于加深对三关节协调模式的理解,并可以为科学设置座高、预防骑行损伤提供重要的理论依据[14]。本研究旨在对比中等高度座高(M)、自选高度座高(P)、较低高度座高(L)、较高高度座高(H)4 种鞍座高度骑行时不同时相内关节做功,探讨鞍座高度对下肢三关节做功模式的影响,从运动控制与协调方面为科学健身骑行提供理论参考。本研究的假设为:(1)推进时相(Phase推),随着鞍座高度的增加,膝关节做功贡献度增加,踝关节做功贡献度减小;(2)恢复时相(Phase恢),随着座高的增加,髋关节做功贡献度减小,膝关节做功贡献度增加;(3)平推期(Phase平),鞍座高度对三关节做功贡献度无影响。
1 研究方法
1.1 研究对象
选取20 名(年龄23.4± 0.5 yr,身高168.7± 3.3 cm,体重65.6± 5.1 kg)上海体育学院学生(男生10人,女生10 人)作为研究对象。所有受试者实验前24 h内未从事剧烈运动,确定其下肢三关节半年内无明显损伤,解剖结构和机能正常,身体状况以及运动能力良好,右腿为优势腿[16],理解本实验意图并签署同意书。
1.2 仪器设备
1.2.1 可调式骑行平台
根据实验需要,本研究团队整合、设计了一种可调式骑行平台(见图1)。骑行的阻力实施由改装后的功率自行车(MONARK,828E)控制,自行研发的骑行平台可实现座高可调(调节精度≤1 mm)。将可调式车架与改装的功率自行车连接得到了实验用的可调式骑行平台。

图1 本研究测试现场仪器架设(左);坐标系设定影像图(右)
1.2.2 三维运动学捕捉系统
本研究运动学数据的采集使用Vicon 红外高速运动捕捉系统和T40 型号的10 台摄像机,采样频率200 Hz。Marker 点粘贴在各解剖学标志点。此外,为跟踪脚蹬测力台,设计了一个“F”型框架,放于测力台前侧面,“F”型框架上有4 个点,另外有两个点放在自行车的中轴上(见图2)。

图2 本研究测试用脚蹬测力台(左);配重脚蹬影像图(右)
1.2.3 三维测力脚踏
动力学数据的采集采用一台定制的脚蹬测力台(长×宽×高:115×80×34.8 mm,瑞士Kistler 公司,型号:9016B),四个角各分布有一个压晶式测力传感器。本研究统一采集右侧下肢(优势腿)的动力学数据,采样频率1000 Hz,测力台安装在右脚踏板上,同时对左侧踏板进行了配重(见图2)。
运动学、动力学数据采集采用外部触发的同步采集器实现两者的同步采集。
1.3 实验方案
在正式实验前采集受试者的身高、体重。受试者到实验室后进行较低负荷自选高度的骑行,热身15分钟。然后进行固定踩踏频率(60 rpm[1])、负荷(1 kg)、4种座高的骑行。预实验证明受试者使用节拍器能够很好地控制骑行频率,因此使用了节拍器来控制骑行频率。膝关节角度采用角度器测量大转子、膝关节外侧髁、踝关节外侧三点连线的角度来确定。本研究选用了4种常用的鞍座高度[17]进行研究,分别为:(1)中等高度座高(M),脚踩踏板位于下死点位置时膝关节屈曲角度为25°;(2)自选高度座高(P),受试者自己选择的座高;(3)较低高度座高(L),自选高度-15°;(4)较高高度座高(H),自选高度+15°。4 种座高的采集顺序是随机的。每种座高受试者骑行3 分钟,当受试者进入稳定状态后(踩踏频率固定在60 rpm[18]),采集稳定状态下10个连续完整的踩踏周期。每次测试间隔,受试者休息3~5 min,待其心率恢复至静息心率时,方可进行下次骑行。受试者在每种座高骑行时,躯干与水平面的夹角保持在35°,脚与踏板中轴保持垂直,且第一跖骨头放在踏板中轴上,目视前方看悬挂物(骑行平台正前方3 m处,与受试者头部等高)[19]。
1.4 数据处理
本研究中对骑行时相的定义[15]:将一个完整踩踏周期(曲柄由上死点位置开始,转动一周再次回到上死点位置)平均分为0~360°,其中10~180°为推进时相(Power Phase ,Phase推),180~350°为恢复时相(Recovery Phase,Phase恢),350~10°为平推时相(Pushing Phase,Phase平),如图3。

图3 骑行时相定义图
原始的运动学与动力学信号采用Butter-worth 四阶数字低通滤波器滤波,运动学截止频率为6 Hz[14],动力学截止频率为50 Hz[14]。通过V3D 软件中基于模型数据的计算(compute model based data),在基于模型的项目属性(model based item properties)中选择关节力矩(joint moment),并通过选择关节/(环节)、相应的参考坐标系完成下肢髋、膝、踝三关节角度、角速度和力矩的计算。例如,计算右膝关节力矩,关节和参考坐标系分别选择右膝和右小腿。V3D软件采用通用的逆向动力学(Conventional inverse dynamics)方法来计算下肢各关节周围由肌肉所产生的净力矩。Matlab自编程序计算获取右下肢三关节矢状面的功、做功贡献度。
1.4.1 关节功率的计算方法

其中,Pi为第i 帧关节功率(W),Mi为第i 帧关节力矩(N·m),ωi为第i 帧关节角速度(rad/s)。关节力矩M与关节角速度ω方向一致时,关节功率为正,否则为负。
1.4.2 关节做功的计算方法

其中W正为P>0 时关节做正功,ts1为P 开始为正时的第s1帧到P最后为正时的第f1帧之间的时间,
W负为P<0 时关节做负功,W净为某时相内关节做的净功。
1.4.3 关节做功贡献度的计算方法[8]

以踝关节为例,其中,ContA为踝关节在某时相内做功贡献度,|WA净|为踝关节在此时相内做的净功的绝对值,|WK净|为膝关节在此时相内做的净功的绝对值,|WH净|为髋关节在此时相内做的净功的绝对值。
1.5 统计学方法
各样本数据的正态分布用Shapiroe-Wilk 进行检验,并采用Levene’s 检验各样本方差齐性。采用多元方差分析(One-way repeated measues of MANOVA)观察座高对不同时相内三关节Con、三关节做功和关节活动度(range of motion,ROM)各指标的影响,若Wilks’Lambda多重检验具有显著性,则采用LSD post-hoc 检验进行事后两两比较,以此确定差异具体来自于哪两种水平,显著性水平设为P<0.05。本研究的统计学全部采用统计软件SPSS21.0(IBMS,NY,USA)进行处理。各指标均采用均值±标准差()表示。
2 结果
多元方差分析检验显示,Wilks’Lambda=0.008,F(81,99)= 4.54,P<0.001,这表示座高变化在整体上对关节做功等生物力学参数的影响具有显著性。
2.1 不同座高骑行时的下肢三关节做功
鞍座高度变化影响了Phase推髋关节做功[F(3,57)=3.43,P=0.02]。在鞍座高度L 骑行时髋关节做功最大(P<0.05),其它3种座高间的髋关节做功差异无统计学意义(P>0.05)。鞍座高度变化影响了Phase推膝关节做功[F(3,57)= 21.03,P<0.001],在鞍座高度L 骑行时做功最大,在鞍座高度H骑行时做功最小,鞍座高度P 和M 间的做功差异没有统计学意义(P>0.05)。鞍座高度变化影响了Phase推踝关节做功[F(3,57)=34.39,P<0.001],在鞍座高度L 骑行时做功最小(P<0.05),在鞍座高度H骑行时做功最大(P<0.05),鞍座高度P和M间的做功差异没有统计学意义(P>0.05)(表1)。
鞍座高度变化没有影响Phase恢髋关节做功[F(2.25,42.69)= 2.94,P=0.06]。鞍座高度变化影响了Phase恢膝关节做功[F(2.21,42.08)= 35.23,P<0.001],4种座高间的做功差异均具有统计学意义(P<0.05),且随着鞍座高度的增加,膝关节做功增加。鞍座高度变化影响了Phase恢踝关节做功[F(3,57)= 43.96,P<0.001],4 种座高间的做功差异均具有统计学意义(P<0.05),且随着鞍座高度的增加,踝关节做功增加(表1)。
鞍座高度变化没有影响Phase平髋关节做功[F(2.11,40.10)= 2.93,P=0.06]、膝关节做功[F(3,57)=1.95,P=0.13]和踝关节做功[F(2.02,38.31)= 1.14,P=0.34](表1)。
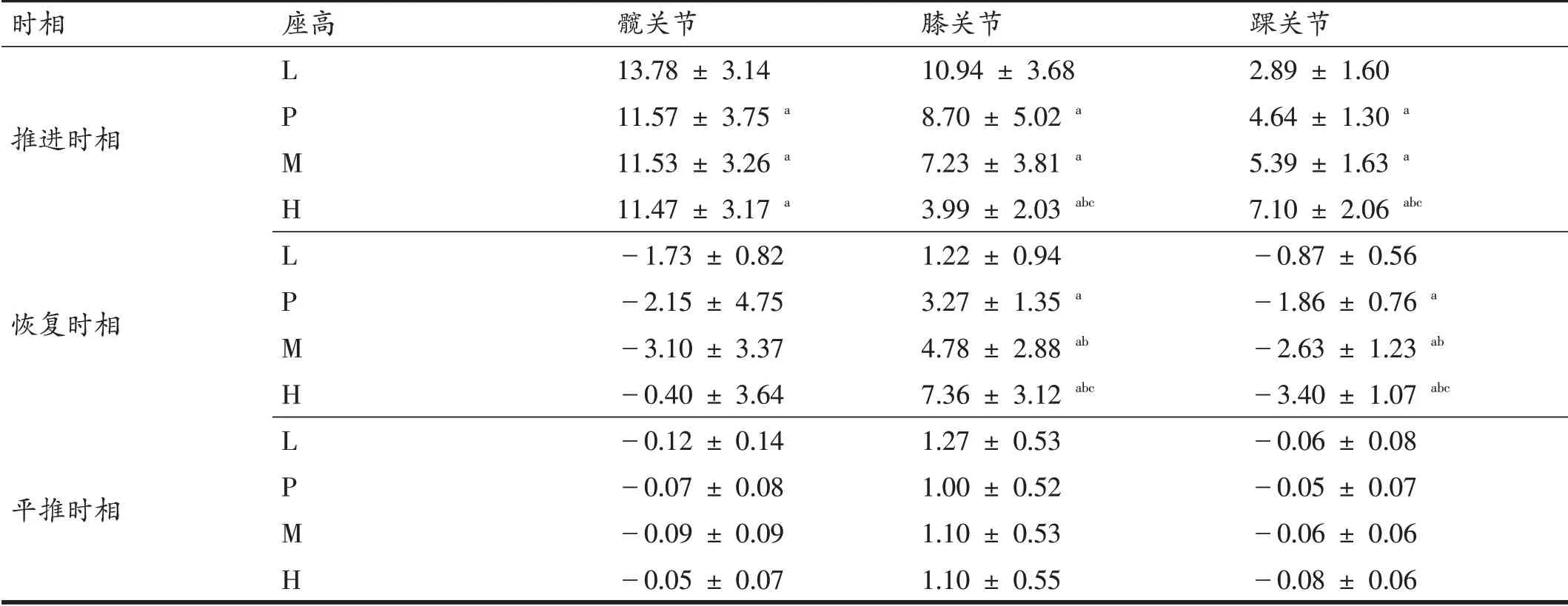
表1 4种鞍座高度骑行时下肢三关节做功比较(J,n=20)
2.2 不同座高骑行时的下肢三关节做功贡献度
鞍座高度变化没有影响Phase推内Con髋[F(3,57)= 1.25,P=0.30],但影响了Con膝[F(3,57)= 12.47,P<0.001]与Con踝[F(2.14,40.61)=29.27,P<0.001]。4种鞍座高度间的Con膝差异均具有统计学意义(P<0.05),且随着座高的增加,Con膝逐渐减小。4 种鞍座高度间的Con踝差异也均具有统计学意义(P<0.05),且随着座高的增加,Con踝逐渐增大(图4左)。
鞍座高度变化影响了Phase恢内Con髋[F(3,57)=16.62,P<0.001]与Con膝[F(3,57)= 10.61,P<0.001],但没有影响Con踝[F(3,57)= 0.62,P=0.61]。4 种鞍座高度间的Con髋差异均具有统计学意义(P<0.05),且随着座高的增加,Con髋逐渐减小。4 种鞍座高度间的Con膝差异也均具有统计学意义(P<0.05),且随着座高的增加,Con膝逐渐增大(图4中)。
鞍座高度变化没有影响Phase平内Con髋[F(1.82,34.60)=1.74,P=0.17]、Con膝[F(1.65,31.26)= 0.21,P=0.77]和Con踝[F(2.13,40.42)= 2.13,P=0.13](图4右)。
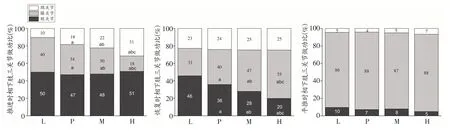
图4 4种鞍座高度骑行时不同时相内髋、膝、踝三关节做功贡献度比较(n=20)
2.3 下肢三关节角速度、力矩和功率
在Phase推内,下肢三关节角速度都是先增大后减小;Phase恢内,髋关节与踝关节角速度先增大后减小,膝关节角速度也是先增大后减小,但最后又逐渐增大;Phase平内,髋关节、踝关节角速度逐渐减小,膝关节角速度逐渐增加(图5左)。
在整个Phase推内,髋关节为伸髋力矩,膝关节开始为伸膝力矩,后变为屈膝力矩;Phase恢内,髋关节还是以伸髋力矩为主,但出现小部分屈髋力矩,膝关节力矩由屈膝力矩变为伸膝力矩;Phase平内,髋关节为伸髋力矩,膝关节为伸膝力矩,踝关节在整个踩踏周期内全部为跖屈力矩(图5中)。
髋关节在Phase推内绝大部分时间做正功;在Phase恢与Phase平内几乎全部做负功,但在座高H骑行时做正功增加;膝关节在Phase推与Phase恢内都是先做正功后做负功,在Phase平内全部做正功;踝关节在Phase推内做正功,在Phase恢与Phase平内做负功(图5右)。

图5 四种鞍座高度骑行时矢状面髋(上)、膝(中)、踝(下)三关节角速度(左,rad/s)、力矩(中,N·m)、功率(右,W)曲线图(n=20)
2.4 下肢三关节关节活动度
鞍座高度变化影响了Phase推内ROM髋[F(2.13,47.26)= 34.15,P<0.001]。鞍座高度L和M、H间的
ROM髋差异具有显著性(P<0.05),P、M和H三种座高间的ROM髋差异无统计学意义(P>0.05)。鞍座高度变化影响了Phase推内ROM膝[F(3,57)=106.98,P<0.001],在鞍座高度H骑行时ROM膝最大,在鞍座高度L骑行时ROM膝最小,四种座高间的ROM膝差异均具有统计学意义(P<0.05),且随着鞍座高度的增加,ROM膝增加。鞍座高度变化影响了Phase推内ROM踝[F(3,57)=66.25,P<0.001],在鞍座高度L 骑行时ROM踝最小(P<0.05),在鞍座高度H骑行时ROM踝最大(P<0.05),四种座高间的ROM踝差异均具有统计学意义(P<0.05),且随着鞍座高度的增加,ROM踝增加(表2)。
鞍座高度变化影响了Phase恢内ROM髋[F(3,57)=12.30,P<0.001],在鞍座高度L 骑行时ROM髋最小(P<0.05),其它3种座高间的ROM髋差异无统计学意义(P>0.05)。鞍座高度变化影响了Phase恢内ROM膝[F(3,57)= 114.47,P<0.001],4 种座高间的ROM膝差异均具有统计学意义(P<0.05),且随着鞍座高度的增加,ROM膝增加。鞍座高度变化影响了Phase恢内ROM踝[F(3,57)= 48.65,P<0.001],4种座高间的ROM踝差异均具有统计学意义(P<0.05),且随着鞍座高度的增加,ROM踝增加(表2)。
鞍座高度变化没有影响Phase平内ROM髋[F(3,57)= 2.00,P=0.12]、ROM膝[F(3,57)= 0.77,P=0.51]和ROM踝[F(3,57)= 0.12,P=0.94](表2)。
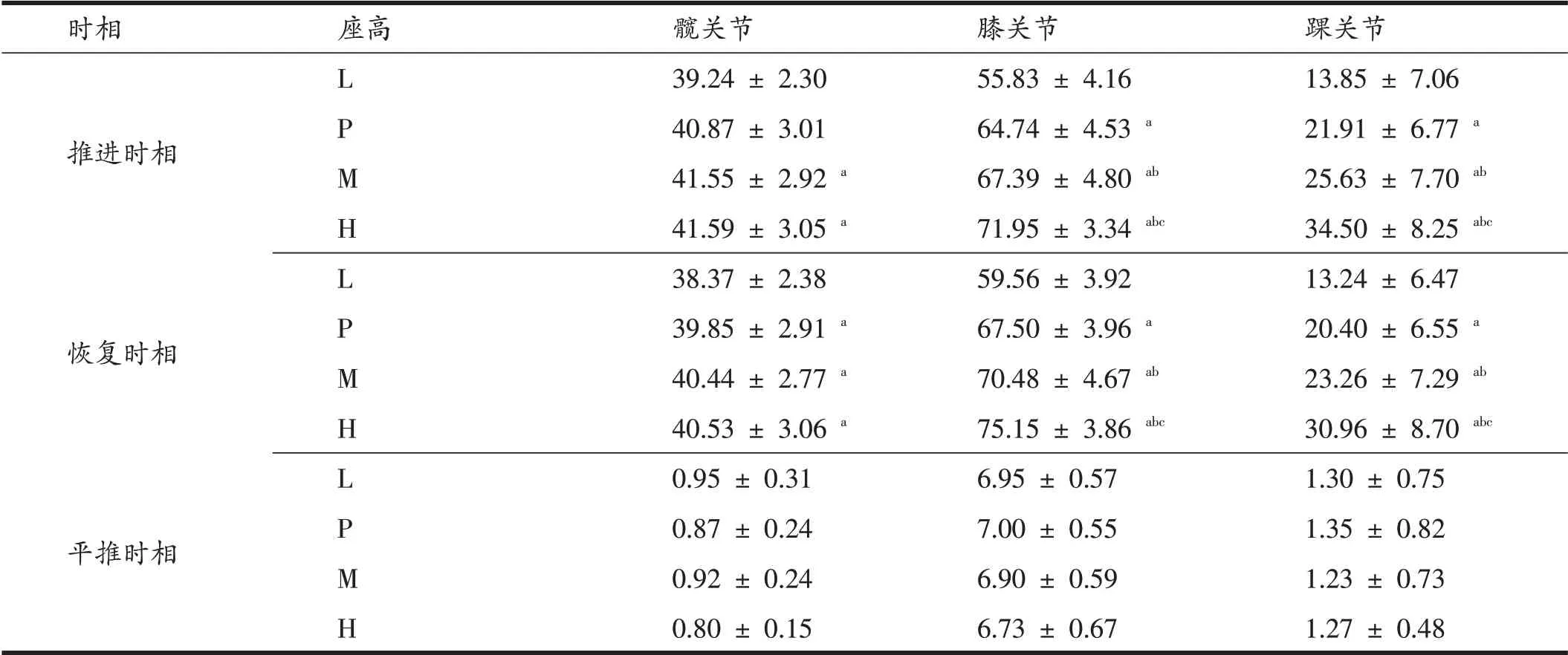
表2 4种鞍座高度骑行时下肢三关节ROM比较(°,n=20)
3 讨论
3.1 推进时相三关节做功贡献度
本研究的目的在于探讨骑行时座高的变化对下肢关节做功,特别是不同的踩踏时相髋、膝、踝做功的影响。研究发现在Phase推内,随着鞍座高度的增加,Con膝逐渐减小,Con踝逐渐增加,Con髋没有变化,这与本研究的假设一致。
Bini等[14]的研究发现,髋关节在一个踩踏周期内的Con没有受到座高的影响,且输出保持在总能量的60%左右。本研究发现髋关节大约提供了总能量50%左右的输出,两者的区别可能是由于受试者不同造成的。本研究发现在座高L骑行时,髋关节做功最大,这归因于此时具有最大的髋关节力矩(图5)。Damm[20]等最新研究发现,降低鞍座高度可以造成髋关节受力增大,这可以从关节力角度解释本研究中降低鞍座高度引起了髋关节力矩的增加。然而,Con髋没有受到座高的影响,这应归因于膝关节与踝关节的代偿。Gonzalez[21]和Ericson 等[22]研究发现,座高变化引起了髋关节力矩的变化,但都没有说明髋关节力矩的具体变化。本研究发现随着座高的增加,在Phase推髋关节力矩曲线逐渐上移,但当座高升到H 时,髋关节力矩曲线突然下降,这说明采用较高的座高骑行时(超过M 后),髋关节力矩不再减小反而增加,因此适当增加座高可以减小髋关节负荷,但过高的座高反而会增加髋关节负荷。
随着鞍座高度升高,Con膝减小,这应归因于膝关节做功随着座高的增加而减小,虽然在此时相内,ROM膝随着座高增加,并引起膝关节角速度增加,但膝关节伸膝力矩却逐渐减小,且屈膝力矩逐渐增加,导致膝关节正功逐渐减小、负功逐渐增加,膝关节净功逐渐减小(图5),这与Ericson[13]与Bini 等[14]的研究一致。Ericson[13]的研究发现,较低的座高会产生更大的股四头肌肌力,这是造成伸膝力矩增加的原因。同时,这也说明增加座高可以减小伸膝力矩,但同时会增加屈膝力矩。
座高的增加引起Con踝增加,这应归因于踝关节做功的增加,这一研究结果同样与Bini 等[14]的研究一致,同时说明在座高增加后,受试者通过增加踝关节能量输出代偿了膝关节能量输出的降低。本研究发现这种策略主要靠增加踝关节角速度来实现,由图5可知座高对踝关节力矩影响较小,但对踝关节角速度的影响显著,这与座高影响了踝关节ROM 有关(表2)。这与Diefenthaeler 等[23]的研究一致,Diefenthaeler 的研究认为,踝关节做功的改变是由关节运动学改变造成的,同时Bini 等[14]认为,这种变化表明受试者骑行经验不足。Fregly 与Zajac 等[24]的研究发现,骑行中踝关节的主要功能是将髋关节产生的能量传递到踏板,为了维持此功能,踝关节需保持一定的刚度,且需要积极的跖屈才能实现。然而,本研究并没有发现座高对跖屈力矩峰值有影响(图5),这与Sanderson 等[25]的研究结果不同,他们发现座高的变化引起了跖屈峰值力矩的变化,这可能是由两个研究的受试者不同造成的:Sanderson 的研究选用的受试者为专业的骑行者,而本研究受试者为普通健康人群,骑行经验不足[26]。Chapman等[26]的研究发现,跖屈力矩的变化通常只有专业骑行者才能做到,这可以解释本研究的发现。
3.2 恢复时相三关节做功贡献度
本研究发现Phase恢内,随着鞍座高度的增加,Con髋逐渐减小,Con膝逐渐增加,Con踝没有变化,这与本研究的假设一致。
目前,未见骑行中Phase恢下肢三关节做功的研究,本研究发现,在Phase恢内,随着鞍座高度的增加,膝关节做正功,且不断增加,踝关节做负功也不断增加,髋关节也具有这样的趋势,但是在座高H 骑行时髋关节改变了做功模式(图5)。因此,本时相内Con膝的增加与Con髋的减小不能简单看作是由两者的代偿产生的,而应归因于髋关节做功模式的改变,而这种模式的改变主要是由于髋关节力矩的改变造成的。有研究发现采用过高的座高骑行会造成髋关节损伤[27],本研究的这一发现或许与此有关,但仍需进一步研究。
骑行中的膝关节除本身产生一定能量外,还负责将髋关节产生的能量向下传递[24],Phase恢内Con膝随着座高的增加不断增加,且逐渐成为此阶段能量的主要提供者。由图5可知,膝关节正功的增加主要是由于在经过下死点后做正功增加,而这又主要归功于此刻膝关节角速度随着座高的增加而增加,这说明增加座高后,骑行者能够更加积极地做屈膝动作。但同时也说明,增加座高会减小Phase推膝关节负担,但会增加Phase恢膝关节负担。
随着座高的增加,踝关节做负功增加,但Con踝却没有变化,始终保持在总能量的24%左右,这可能与维持能量传递有关[15]。由图5可知,此时相内,踝关节吸收能量的增加也主要来自于踝关节角速度的增加,这也进一步说明增加座高可以使受试者能够更加积极地做伸踝屈膝动作。
3.3 平推时相三关节做功贡献度
座高没有影响Phase平三关节Con,这与假设相符。在此时相内,膝关节为能量的主要输出关节,髋关节与踝关节做很小的负功,吸收了少量的能量。这与此阶段非常短(20°),且处于上死点附近,髋关节与踝关节几乎没有屈伸,膝关节做了轻微的伸膝有关。
4 结论
推进时相,髋关节是为骑行提供能量的主要关节,且未受到座高的影响;随着座高的增加,膝关节能量输出的减少被踝关节所代偿,且这种策略主要由踝关节角速度的增加实现。
恢复时相,随着座高的升高,膝关节做功贡献度逐渐增加,且逐渐成为提供能量的主要关节;踝关节没有受到影响,这种策略主要由髋关节力矩变化,膝关节、踝关节角速度的增加实现。
平推时相,座高变化没有影响下肢三关节做功贡献度,膝关节为提供能量的主要关节。
本研究结果可为健身骑行提供一些建议:骑行时应对座高进行适当的调整,在自选座高的基础上可适当增加座高,但不应超过本研究中的中等座高高度;平时注意加强踝关节训练,既可以有效地保证能量的传递,又可以代偿部分膝关节能量的产生。
