基于改进双Sigmoid模型的磁流变减振器力学建模研究
2019-08-19张进秋刘义乐彭志召孙宜权
彭 虎, 张进秋, 刘义乐, 张 建, 彭志召, 孙宜权
(1.陆军装甲兵学院 装备保障与再制造系,北京 100072; 2.陆军装甲兵学院 车辆工程系,北京 100072)
磁流变减振器(Magneto-Rheological Damper, MRD)是一种结构简单、阻尼可调性好且易于控制的智能半主动控制执行器,通过改变阻尼活塞上绕制的线圈内电流的大小,改变活塞与钢筒间隙内的磁场强度,从而改变间隙内磁流变液的黏度,实现阻尼可调。MRD具有响应快、设计灵活性好、阻尼力大、可靠性好、能耗低且成本低等优点,广泛应用于建筑、桥梁、汽车及列车等工程领域[1-3]。为了实现对MRD的有效控制,需要建立其力学模型。由于黏滞阻尼力的存在,MRD的力学特性曲线存在一定的滞回特性,给建模带来困难[4]。
国内外学者对MRD力学模型的建立展开了广泛研究,由于MRD的变阻尼过程涵盖了电、液、磁、固等多方面领域的内容,且其力学模型存在非线性特性,应用流变学理论推导其力学模型非常困难,因此,通常在建模时基于试验数据来展开。目前,典型的MRD力学模型可以分为参数化模型和非参数化模型两类,相比于利用神经网络等智能算法建立的非参数化模型,参数化模型可描述MRD阻尼特性曲线的阻尼、刚度、形状及力学特性等问题,具有意义明确,易于建模及工程实现等优点[5]。Stanway等[6]提出了Bingham模型,其表达式简洁,各参数意义明确,但Bingham不能准确表示高速条件下阻尼力衰减情况,以及低速下的阻尼力-速度曲线滞回特性,精度有限。Gamoto等[7]针对MRD阻尼力偏置及存在黏塑性现象等问题,提出了Bingham黏弹塑性模型,建模时添加摩擦力及弹性力,有效解决了阻尼力偏置及黏塑性问题。Werelwy等[8]根据Bingham模型无法描述低速下阻尼力-速度曲线的滞回特性问题,提出了非线性双粘力学模型,将屈服前区和屈服后区分别建模,可较好的描述滞回特性问题。但该模型采用分段函数表示,函数不连续,且依旧无法表示阻尼力衰减现象。陈凡[9]提出了一种可描述滞回现象及阻尼力衰减现象的参数化滞回模型,但该模型在速度提高或者电流加大之后,曲线形状与滞回曲线差异较大,无法满足建模需求。Wen[10]提出的Bouc-wen模型可有效描述低速下的滞回特性,与MRD试验曲线的拟合度较高,但需要14个拟合参数,且表达式中存在微分方程,模型较复杂,且其部分参数意义并不明确。徐赵东等[11]根据MRD阻尼力与速度的非线性特性与Sigmoid函数表达式类似的现象,提出了阻尼力Sigmoid模型,但该模型无法描述滞回现象。李秀领等[12]根据MRD滞回曲线中上下两分支形状的对称特性,利用双sigmoid函数来构建MRD力学模型,但该模型并未考虑位移与阻尼力的关系,蓄能器刚度特性的影响,以及阻尼力偏置因素。
本文基于MRD性能试验数据,考虑电流、位移、速度对MRD阻尼力建模的影响,提出一种改进型双sigmoid模型(Improved Double Sigmoid Model, IDSM),对其参数的含义及对模型的影响进行分析,探讨各参数与电流及速度的关系,并对参数进行辨识。最后,采用误差均方根值,对模型输出阻尼力及试验得到的阻尼力值的差异性进行分析,验证模型的准确性。
1 MRD性能试验
1.1 MRD设计
设计的筒式MRD主要由供电线、活塞、活塞杆、线圈、浮动活塞、补偿气室及钢筒等部分组成,其结构如图1所示。活塞由内阻尼活塞和外导向活塞组成,可缩短轴向尺寸,磁回路从导向活塞绕回,可减小漏磁。导向活塞上下端开有MRF流通孔,阻尼缝隙采用环形缝隙式结构,MRF工作模式为阀式。活塞在拉伸和压缩过程中,活塞两端产生压差,MRF在压差作用下流过阻尼缝隙。此时,若给线圈加电,产生的磁场垂直于阻尼缝隙,从而改变缝隙内MRF的黏度,改变阻尼力,实现变阻尼,通过改变电流的大小可实现阻尼连续可调。
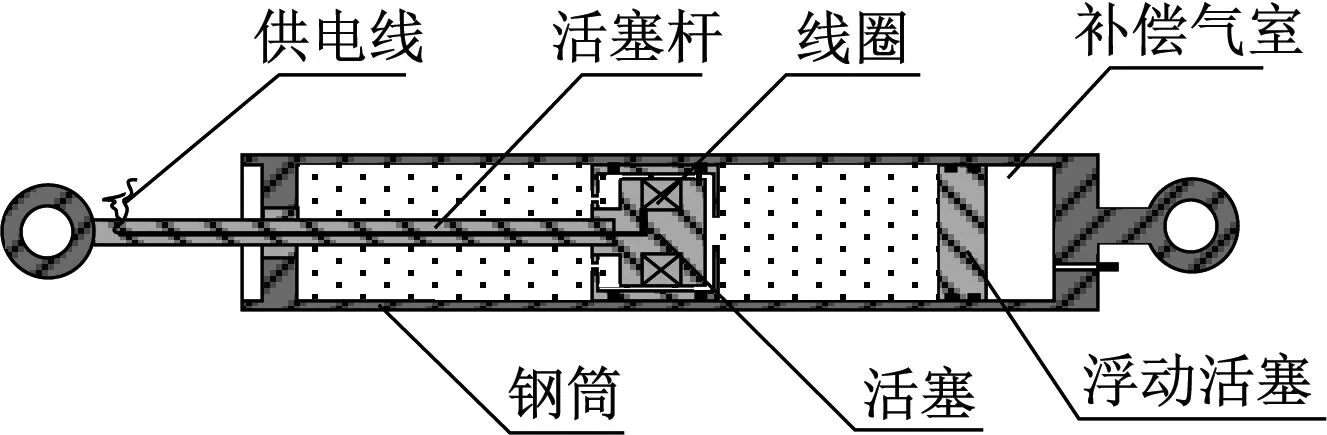
图1 MRD结构图
1.2 MRD性能试验
MRD性能试验系统如图2所示。系统主要由力传感器、相对位移传感器、数据采集仪、程控电流源、传感器供电电源、数据采集上位机、试验台及其控制上位机等组成。采用正弦激励,通过程控电流源改变加载在MRD线圈上的电流值及激振速度,测量力和位移值。设定电流值分别为0 A、0.1 A、0.25 A、0.5 A、1 A、1.5 A、2 A,速度值分别为0.05 m/s、0.1 m/s、0.2 m/s、0.3 m/s、0.4 m/s、0.52 m/s,正弦激励幅值A=0.025 m,数据采集频率f=2 048 Hz。

图2 MRD性能试验系统
试验得到数据后,位移信号经微分处理后变成速度信号,可得到各个工况下的阻尼力-位移及阻尼力-速度特性曲线。限于篇幅,给出0.05 m/s速度下的MRD阻尼特性曲线,如图3所示。

(a) 阻尼力-位移
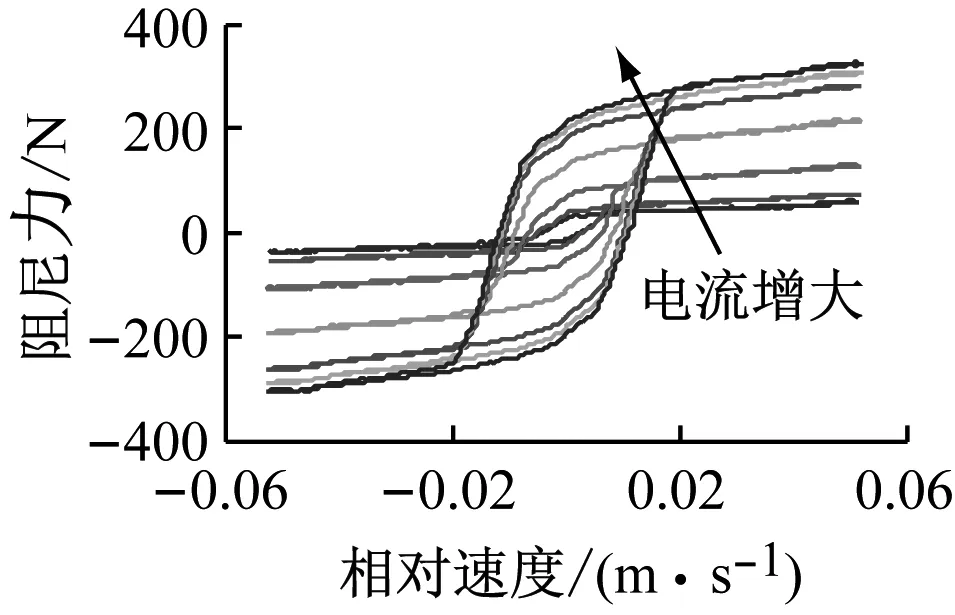
(b) 阻尼力-速度
图3可知,MRD示功曲线饱满,不存在“塌陷”现象,随着电流增加,示功曲线包围的面积增加,表明MRD耗功能力的增加,具备较好的耗功能力。电流在1 A以前,随着电流增加,阻尼力值的增长较为迅速,而在1 A以后,增长较为缓慢,表明磁场在1 A左右逐渐趋近饱和。
2 MRD力学模型的建立
2.1 双Sigmoid模型
图3可知,由于黏滞阻尼力的存在,MRD的阻尼力-速度呈现滞回特性,即在速度曲线在拉伸和压缩两种运动状态下并非完全重合,而是在速度趋近于0附近呈现出一个滞回环,滞环随着电流的增大而增大。阻尼力-速度特性曲线与S型生长函数Sigmoid函数的趋势十分相似。李秀领等[12]根据MRD滞回曲线中上下两分支形状的对称特性,利用双Sigmoid函数来构建MRD力学模型,双Sigmoid模型(Double Sigmoid Model, DSM)表达式为

(1)

2.2 改进双Sigmoid模型
基于上述分析,在文献[12]提出的双sigmoid模型的基础上,考虑MRD建模存在的关键性问题,利用sigmoid曲线的准确建模特性,以及参数化滞回模型对低速滞回特性的建模准确性特性,提出改进型双sigmoid模型,其表达式为
(2)


(3)
式中:A为振幅;f为激励频率。
改进双Sigmoid模型如图4所示。该模型包含双Sigmoid滞环模块、黏滞阻尼力模块cb、蓄能器刚度模块k0及偏置力模块f0。可弥补DSM的不足,待定参数7个,且不包含微分项,各参数意义明确,可方便编程实现,易于工程化应用。
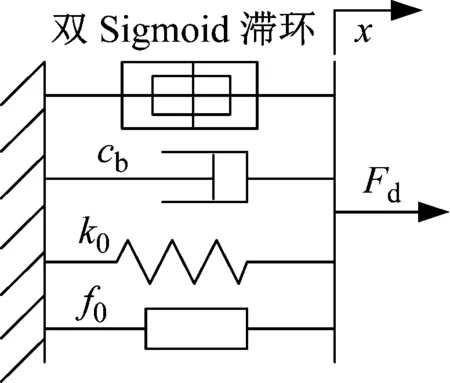
图4 改进双Sigmoid模型
2.3 参数含义及其对模型的影响分析
与双Sigmoid模型相比,改进双Sigmoid模型需要分析的关键参数包括换向符号sgn(x)、k、β、δ、k0及f0。
(1) sgn(x)对模型的影响
(2)k对模型的影响
分别令k为0.1k、k及10k,得到k对模型的影响如图6所示。图中可知,随着k的增加,在滞环转折处的曲线光滑度逐渐下降,因此,k的取值不宜过大。
(3)β对模型的影响
(4)δ对模型的影响
分别令δ为0.5δ、δ及2δ,δ对模型的影响如图8所示。与δ相反,随着δ的增加,滞环宽度逐渐增加,δ与x的方向有关,调节滞环宽度时,其与sgn(v)的乘积为定值,可保证一定的基础滞环宽度。通过改变β及δ的大小可使IDSM适应高速和低速条件下不同的滞环宽度需求。

图5 IDSM-sgn(x)与IDSM-sgn(v)的比较

图6 k对模型的影响
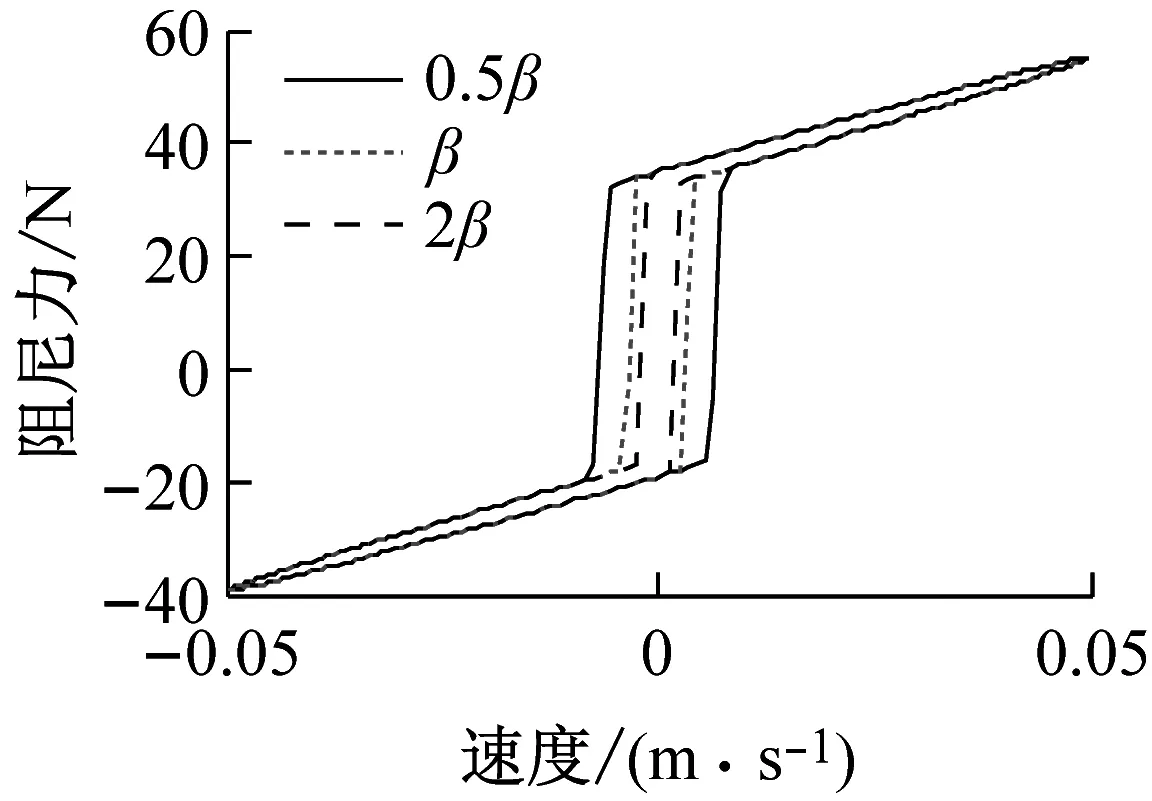
图7 β对模型的影响
(5)k0对模型的影响
分别令k0为0.5k0、k0及2k0,k0对模型的影响如图9所示。随着k0的增加,阻尼力屈服后的拉伸和压缩阻尼力差别逐渐增加,通过改变k0的大小可改变IDSM屈服后区的正逆曲线的高度差异,适应不同速度和电流下的差异需求。
(6)f0对模型的影响
分别令f0为0.5f0、f0及2f0,f0对模型的影响如图10所示。随着f0的增加,阻尼力偏置情况逐渐改善,通过添加f0可使IDSM阻尼力归零。
综上分析可知,sgn(x)、β、δ、k0及f0均会对MRD阻尼力模型产生影响,通过调节这些参数可以使模型满足不同条件下的MRD阻尼力建模需求。
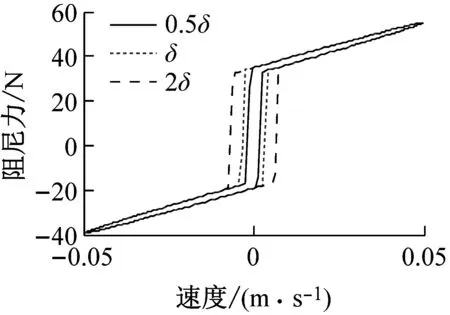
图8δ对模型的影响
Fig.8 The influence ofδon model

图9 k0对模型的影响

图10 f0对模型的影响
2.4 参数对比分析
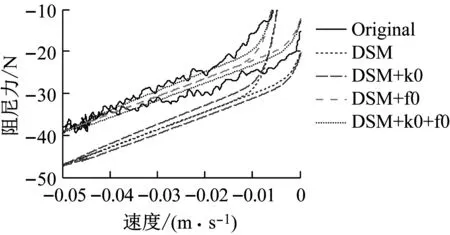
为了进一步对比各参数对模型的影响,以及IDSM相比于DSM的建模优势,不失一般性,选择k0及f0两个参数作为对比。其中,原始试验数据得到的曲线命名为Original,DSM单独加上k0命名为DSM+k0,DSM单独加上f0命名为DSM+f0,DSM加上k0及f0命名为DSM+k0+f0(即IDSM)。电流为0 A,0.05 m/s速度条件下,阻尼力-位移及局部图、阻尼力-速度及局部图分别如图11、12所示。

(a) 全局图

(b) 局部图

(a) 全局图
(b) 局部图
图11及图12可以看出,DSM与DSM+k0与Original相比存在偏置力,而DSM+f0及DSM+k0+f0增加了偏置力项f0之后,与Original的阻尼力在大方向上一致性较好。从Original可以看出,阻尼力在屈服后区的拉伸和压缩两个方向上,阻尼力大小不相等,DSM+k0及DSM+k0+f0由于增加了k0项,与Original存在较好的一致性。相比之下,DSM无k0及f0项,而IDSM不仅可消除偏置力带来的影响,且与Original的阻尼力拉伸和压缩状态下的大小差异存在较好一致性,建模精度得到提高。
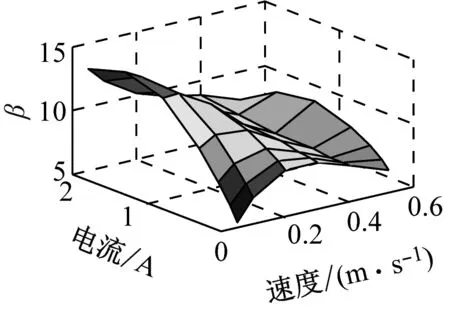
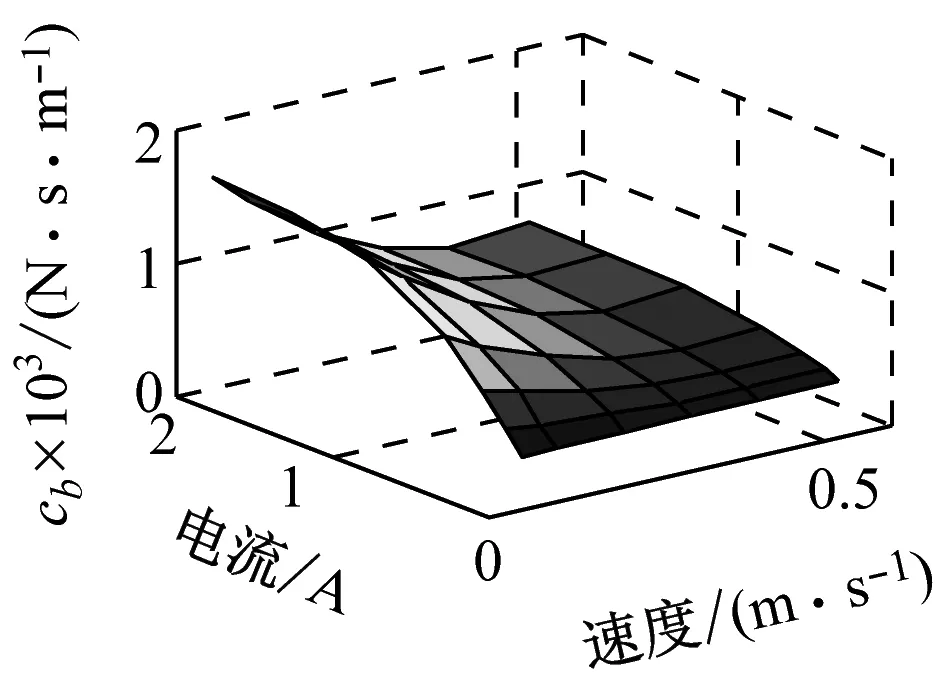
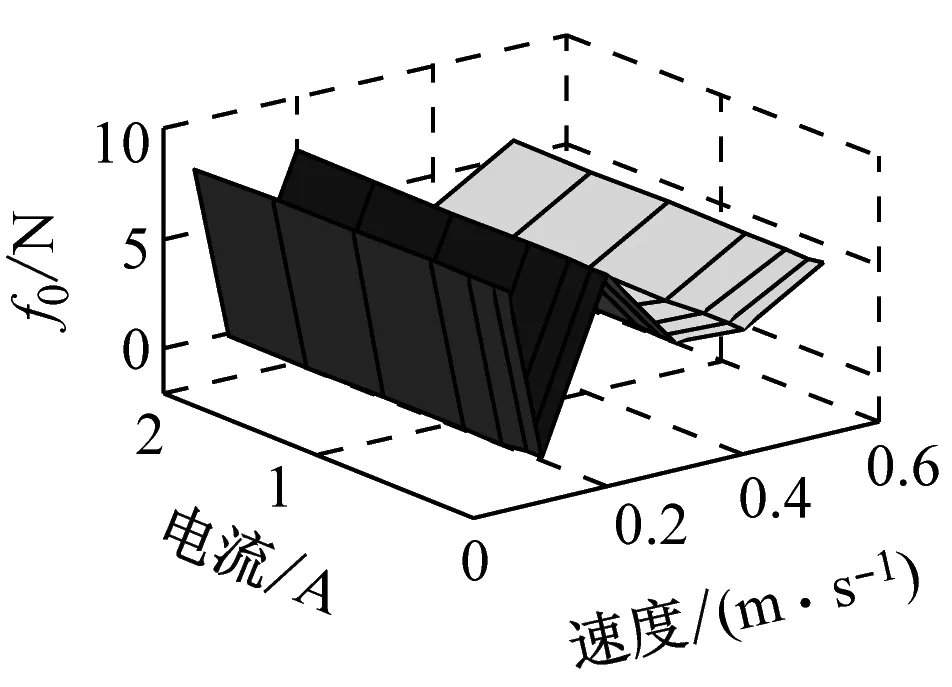
2.5 各参数与电流及速度的关系


(e) cb (f) k0 (g) f0

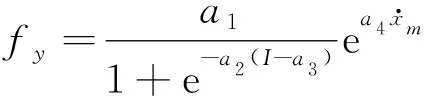
(4)

(5)

(6)

(7)
(8)
k0=f1I4+f2I3+f3I2+f4I+f5
(9)

(10)
参数辨识结果如图14所示。对比图13及图14可知,两幅图中对应参数图形的一致性较好,表明式(4)~(10)可较好地表示各参数与速度及电流之间的关系。

(a) fy

(b) k
(c) β

(d) δ
(e) cb

(f) k0
(g) f0
图14 各参数辨识结果
Fig.14 Identification result of each parameter
3 MRD力学模型的验证
MRD力学模型的验证包括拟合结果验证和模型预测验证两部分。其中,拟合结果验证是验证IDSM及拟合得到的各个参数与电流及速度的关系式的正确性;模型预测验证则是通过改变电流值,试验测量MRD阻尼力值,与仿真环境下建立的IDSM模型中,改变相同电流值时得到的MRD阻尼力值进行对比,验证模型的预测准确性。
3.1 拟合结果验证
不失一般性,试验结果中的低速0.05 m/s及高速0.52 m/s速度条件下,阻尼力-位移及阻尼力-速度的拟合值与试验值的对比分别如图15、16所示。阻尼力-位移示功图的曲线由内而外,加载电流依次增大,分别为0 A、0.1 A、0.25 A、0.5 A、1 A、1.5 A、2 A。图中的虚线代表试验值,实线代表拟合值。
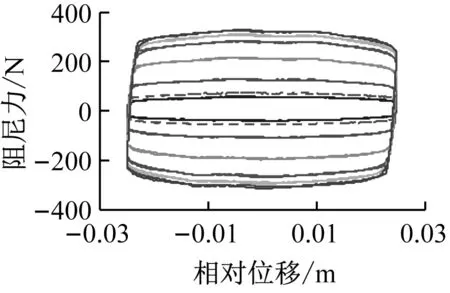
(a) 阻尼力-位移
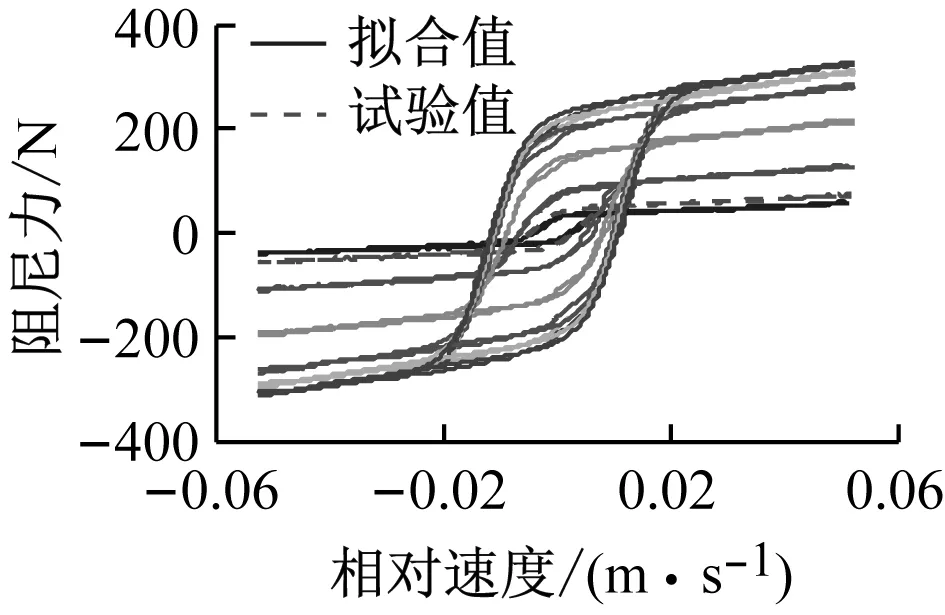
(b) 阻尼力-速度

(a) 阻尼力-位移
由图15及图16可知,不同的电流及速度条件下,IDSM与Original的拟合度均较好,拟合精度较高。表明在MRD可加载的最大电流值及最大速度下,IDSM均与试验结果具有较好的拟合度。
3.2 模型预测验证
设定振幅A=0.025 m,分别取电流值0 A、0.1 A、0.25 A、0.5 A、1 A、1.5 A、2 A,得到试验测量的阻尼力值,与在仿真环境下建立的IDSM模型,加载同等条件下的电流,得到的模型预测值。对比两阻尼力值,验证模型的准确性。阻尼力随电流的变化及其局部图分别如图17、18所示。
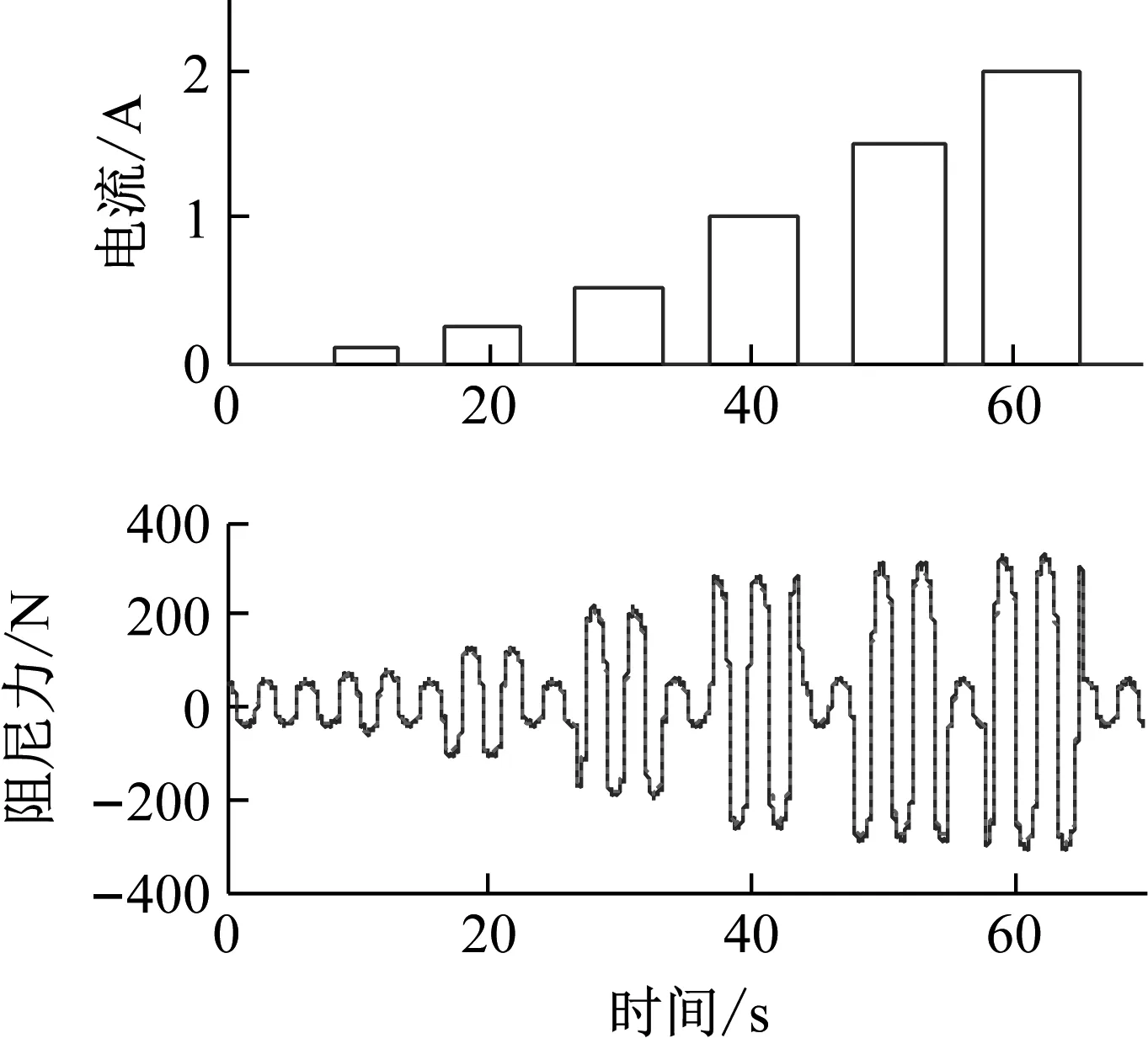
图17 阻尼力随电流的变化

图18 阻尼力随电流的变化局部图
图17及图18可知,模型预测值与试验值有较好拟合度,电流值较小的时候,拟合度更好,随着电流增大,拟合度稍有变差。统计学上,标准差可反映数据集的离散程度,利用标准差表示MRD试验阻尼力Ftest与模型预测阻尼力Fpredict之间的离散关系,阻尼力标准差σ表达式为
(11)
速度分别为0.05 m/s、0.1 m/s、0.2 m/s、0.3 m/s、0.4 m/s、0.52 m/s,电流0 A、0.1 A、0.25 A、0.5 A、1 A、1.5 A、2 A,得到σ与电流及速度的关系如表2及图19所示。

图19 σ与电流及速度的关系
图19可知,随着电流及速度的增加,MRD标准差σ随之增加,σ的最大值11.1 N,与此刻的阻尼力650 N之比,可得误差相对值为1.71%,可见该误差值较小,IDSM预测阻尼力较准确。

表2 σ与电流及速度的关系
4 结 论
本文对设计的MRD进行了性能试验,根据MRD阻尼特性建立了相应的力学模型,并对模型参数进行识别,对模型准确性进行了验证。可得如下结论:
(1) 该MRD的阻尼特性曲线表明,阻尼力呈非线性,随着电流增加,阻尼力增加,示功曲线包围面积随之增加,表明MRD耗功能力增加,具备较好的耗功能力;
(2) 相比于Bingham模型无法体现阻尼力非线性特性,以及Bouc-wen模型表达式复杂等,IDSM针对DSM存在的缺陷,考虑阻尼力与位移的关系、换向符号、蓄能器刚度及偏置力等因素的影响,提高了模型准确性;
(3) IDSM具有模型精确、表达式简洁、参数物理意义明确且易于编程实现等优点,在不同的电流和速度下,其模型精度均较好,适用于工程领域。
