碳纳米管/尼龙并股人工肌肉纤维的制备与性能表征
2019-08-14吴鹏飞宋彦辉俞能晟邸江涛门传玲
吴鹏飞,宋彦辉,俞能晟,乔 健,邸江涛,门传玲
(1.上海理工大学 能源与动力工程学院,上海 200093;2.中国科学院多功能材料与轻巧系统重点实验室,中国科学院苏州纳米技术与纳米仿生研究所先进材料研究部,江苏 苏州 215123)
近些年来,仿生人工肌肉材料的发展备受科学家关注,并有望在软体机器人、医学、可穿戴织物、航空航天等领域得到重要应用。人工肌肉是一类在外部刺激(如电、光、热、湿度、以及气压液压等)条件下可以产生可逆收缩、弯曲、旋转以及跳跃的新型材料。根据其结构和材料特性,目前发展研制的人工肌肉主要包含三种基本的驱动运动形式,即伸缩、弯曲和旋转,并且可以通过不同的结构设计、多个人工肌肉的复合装配以及协调合作,从而实现其他复杂的运动如跳跃、多自由度旋转弯曲等[1-4]。
经过数十年的发展,制备人工肌肉的材料由传统的形状记忆合金、形状记忆聚合物[5-6],逐渐发展到介电弹性体以及电活性聚合物[7-8],产生了从刚性到柔性的转变。柔性人工肌肉突破传统驱动方式的刚性结构对肢体运动的限制,使得人工肌肉的性能有了显著进步。Haines等人利用尼龙-6,尼龙-6,6和聚乙烯制备了一种线圈状柔性驱动器,在水热条件下能产生2.63 kJ/kg的伸缩机械功,其负载能力是相同长度和质量下生物肌肉的100倍[9]。Mirvakili等提出通过将导电银胶涂覆在尼龙上增强导电性,然后加捻制备螺旋结构复合人工肌肉,在焦耳热作用下能产生显著的伸缩驱动。但由于银胶涂层的不均匀涂覆,并且聚合物在长时间热处理下,刚度和强度迅速降低,产生严重不可回复蠕变效应,制备的银/尼龙复合人工肌肉的循环寿命低[10]。
为了改善这一类人工肌肉的稳定性,设计并优化人工肌肉对热能的吸收,研究人员用铜线卷绕螺旋状聚合物线从而通过铜线将热量均匀传递到聚合物人工肌肉上产生驱动,抑或是在铜线缠绕聚合物的基础上再涂覆银浆,来改善加热器到螺旋人工肌肉的热传递来实现快速致动[11]。然而,使用铜线和银浆不仅增加了人工肌肉的重量,而且降低了人工肌肉的柔韧性。另外,螺旋结构聚合物纤维和使用的金属框架之间的热膨胀系数的差异往往会降低人工肌肉的性能。
碳纳米管[12-20]、石墨烯[21-23]等纳米碳材料具有轻质高强、高导电、高导热、优异的结构柔性等特点,在人工肌肉领域崭露头角。碳纳米管纤维的制备目前主要有三种制备方法,包括湿法纺丝[24-25]、阵列纺丝法[26-27]以及直接纺丝法[28-29]三种。Foroughhttps://pubs.acs.org.ccindex.cn/author/Foroughi%2C+Javad等人利用化学气相沉积技术生长碳纳米管阵列,并通过纺丝技术将碳纳米管与尼龙等聚合物混纺,缠绕在弹性体聚合物上,制备对电热响应的导电碳纳米管/聚合物复合人工肌肉,具有优异的驱动性能及良好的循环稳定性。但碳纳米管阵列一方面对于可纺丝的要求极高,另一方面可纺丝的碳纳米管阵列相对成本较高,且产量低,对于大规模生产应用有较大限制。同时,制备的人工肌肉工作电压较高,为20 V/cm[30]。
因此,如何制备成本低廉,工艺简单,工作环境温和并且具有良好的驱动性能和循环稳定性能的电热驱动人工肌肉,仍然存在一定挑战。在本文的研究中,采用的浮动催化化学气相沉积法批量制备的碳纳米管纤维具有优异的导电、导热性能,将其与尼龙缠绕复合制备的人工肌肉能够在低电压(小于1 V/cm)下产生显著且稳定的电热伸缩驱动,其做功能量密度高达538.1 J/kg,在降低成本的同时保证了较优异的驱动性能。
1 实验
1.1 碳纳米管原丝的制备
使用浮动催化化学气相沉积法制备碳纳米管原丝。将0.5%~2.0%二茂铁和1.0%~3.0 %的噻吩溶于乙醇溶液中,再将混合溶液以20~30mL/h的进料速度注入温度为1300℃的高温立式CVD炉中。使用氢气(3000 sccm)和氩气(3000 sccm)混合气体作为载气,生长出的碳纳米管经过组装形成连续的碳纳米管气凝胶筒状体,并在载气作用下带出高温炉体,碳纳米管气凝胶筒状体经过水封后被致密化形成碳纳米管原丝[8-9]。
1.2 人工肌肉的制备
取20 cm的碳纳米管原丝和20 cm长,直径为0.233 mm的尼龙线并股,并垂直放置,并股纤维上端与速率可控的电机相连,下端挂有重物。控制电机的转速以及转动时间,实现对并股线的加捻。在加捻的过程中,并股线的下端在旋转的方向上被固定,以保证在对并股线上端加捻的过程中,下端可以自由上下移动而不产生解旋,最终获得2.3 cm致密螺旋结构的并股弹簧线(即并股人工肌肉纤维)。
1.3 分析及表征
通过在碳纳米管原丝上施加电流使人工肌肉进行收缩实验,并且使用从Omega购买的非接触线性位移传感器(OM-USB-1208FS)测量收缩。使用直流电源(吉时利2200-60-2)向碳纳米管/尼龙并股人工肌肉纤维提供所需的电流。所有线性致动都是从非接触式线性位移传感器获得的,该传感器从附着在重物末端的铁片的垂直运动中收集数据,以便于观察和测量。人工肌肉的循环拉伸性能是通过美国英斯特朗公司的万能试验机(Instron 3365)测量的,将样品置于1cm×2.5cm的框架中,两端固定进行测试。扫描电子显微镜(SEM,Quanta 400 FEG,FEI,Hillsboro,USA)用于表征CNT的形态。
2 实验结果及讨论
2.1 碳纳米管原丝的表征

(a)碳纳米管原丝以及将纤维弯成拱形并回弹或将纤维打结光学图;(b)纤维SEM图像;(c)纤维拉曼表征;(d)纤维力学性能表征。
图1 高性能碳纳米管纤维表征
Fig.1 Characterization on carbon nanotube fibers
优异的原始材料是获得高性能人工肌肉的关键。浮动CVD法制备的碳纳米管原丝主要由大量的碳纳米管和少量残留的催化剂铁颗粒组成。将原丝连续高速加捻一段时间,获得与原始窄带相同长度且具有均匀直径的纤维。将纤维缓慢的通过两个滚轮进行轧制,可以得到厚度可控的扁平带。纤维看起来不再柔软而具有一定的刚性和塑性,一方面纤维可以弯曲成拱形且在释放后可以恢复,另一方面纤维可以进行打结(图1(a))。浮动法直接制备碳纳米管原丝由于在收集过程中会产生一定的拉伸,因此会对碳纳米管原丝的组装施加一定的牵引力,使碳纳米管的排列有一定的取向,从而提高碳纳米管的性能(图1(b))。拉曼光谱的G峰(1590 cm-1)与D峰(1320 cm-1)的强度比IG/ID 被用于半定量的评估碳纳米管纤维的石墨化程度[32]。在本研究中使用纤维的IG/ID为2.07(图1(c)),说明碳纳米管的结晶度较高,缺陷程度比较低,生长的碳纳米管的品质较高。碳纳米管纤维本身具有优异的力学性能(图1(d)),制备的单根碳纳米管纤维可以承受2 N的力,具有0.4 N/tex的比强度同时纤维的断裂伸长率达到7%。碳纳米管纤维足够高的断裂载荷以及合适的断裂应变保证在碳纳米管纤维和尼龙线在混合扭转加捻过程中不出现断裂现象,保证碳纳米管纤维在之后的施加电流过程中可以顺利加热从而使人工肌肉进行热驱动。
2.2 纤维肌肉的制备及拉伸性能调控

(a)并股人工肌肉纤维的加捻装置;(b)碳纳米管/尼龙并股人工肌肉纤维负载18.1MPa应力,在0.05 A方波电流电热驱动下的可逆收缩率情况(收缩率:14.2%);(c)并股人工肌肉纤维的可逆收缩量与纤维捻度之间的关系图;(d)并股人工肌肉纤维的可逆收缩量与施加电流之间的关系,其中插图为电流为0.05 A时肌肉纤维的热成像图;(e)并股人工肌肉纤维的可逆收缩率以及能量密度随外加应力的变化情况(施加电流为0.05A);(f)并股人工肌肉纤维的在0.05A电流作用下的伸缩率与通电频率之间的关系。
图2 碳纳米管/尼龙并股人工肌肉纤维的制备及人工肌肉纤维的驱动性能表征
Fig.2 Preparation and actuation performance characterization of CNT/Nylon plied artificial muscle fibers
在本实验中,主要研究了碳纳米管/尼龙线并股线构成的人工肌肉纤维的电热驱动性能。并股人工肌肉纤维的加捻装置如图2(a)所示。取相同长度碳纳米管纤维和尼龙线一起垂直固定,下端悬挂重物,通过电机旋转进行加捻卷绕形成碳纳米管/尼龙并股人工肌肉纤维。聚合物在高温下会发生体积膨胀,在本研究中使用碳纳米管纤维作为加热元件,通过通电对碳纳米管纤维进行焦耳加热,再在热传导形式下,使尼龙纤维受热发生膨胀,从而产生驱动。经过实验调控最大的收缩量可达到14.2%,如图2(b)所示。肌肉的收缩与肌肉相邻的两个螺旋结构之间的距离是存在关系的,两个螺旋结构之间的距离增加,肌肉的可移动的空间便会增加,从而收缩量便可能会随之而增加。在实验中,增加螺旋结构之间的距离的方法便是将形成紧密螺旋结构的纤维肌肉回捻一定的圈数。完全形成碳纳米管/尼龙并股人工肌肉纤维的总捻度为1800 r/m,图2(c)是施加18.1MPa的应力且电功率为0.43 W不同捻度通电收缩率的关系,在捻度为1700 r/m时,伸缩率达到最大为14.2%,随后再增加回捻圈数时,伸缩率开始下降,因为过回捻时,纤维肌肉的结构遭到破坏。人工肌肉的致动是通过焦耳热产生的,因此不同的通电电流产生的焦耳热对纤维肌肉的伸缩性能的影响也是完全不同的。碳纳米管纤维产生的焦耳热使尼龙纤维膨胀,纤维直径变大,整体纤维呈现收缩的趋势。图2(d)表明随着通电电流的增加,碳纳米管纤维产生的焦耳热逐渐增加,因此纤维肌肉的收缩量逐渐增加,在通电电流为0.05 A时,人工肌肉的温度最高为38℃,与其他文献报道的大于50℃的温度相比[9-11],比较安全,纤维肌肉的收缩率为14.2%。图2(e)反映了收缩率以及能量密度随着施加不同应力的变化曲线。收缩率随着应力的增加先增加后减小,在18.1 MPa时,收缩率达到最大,在施加33.6 MPa的应力时,仍然有6.26%的收缩量。同时随着应力的增加,纤维肌肉的能量密度逐渐增加,在28.4 MPa的应力下,能量密度达到最大值538.1 J/kg。从图中可以看出,在应力增加时,虽然收缩率有明显降低,但能量密度仍然保持比较高的值,实验中制备的人工肌肉所能达到的能量密度远高于哺乳动物类人工肌肉,与阵列纤维制备的人工肌肉产生的能量密度630 J/kg和镀银制备的人工肌肉产生的能量密度528 J/kg相差不大[30,6]。图2(f)显示了在应力为18.1 MPa,通电电压为8V条件下,不同通电频率下的频率响应。由于冷却时间的限制,并未达到完全的伸长状态。但在室温下18.1 MPa下施加0.027 Hz,8 V的脉冲时,可以获得对称的10%的拉伸致动。
2.3 人工肌肉循环稳定性测试
(a)人工肌肉循环稳定性测试;(b)循环测试后50周期的循环;(c)肌肉纤维20%应变下通电前后的循环拉伸性能。
图3 人工肌肉稳定性测试
Fig.3 Stability test results for the muscle
碳纳米管纤维与尼龙线经过加捻成螺旋纤维后,纤维具有可拉伸性能,直径增大。对螺旋纤维施加18.1MPa的应力,空气环境下,施加8V的电压,进行循环稳定性的测试。图3(a)是纤维人工肌肉循环150次的结果。从图中可以看出,在最初的30圈的循环过程中会有下降的现象。应力和焦耳热都会改变纤维的内部排列,当断开电源,纤维不能完全恢复到原来的状态,导致纤维发生塑性变形。而肌肉纤维经过前期的下降趋势后,并股人工肌肉纤维的伸缩驱动达到了一个稳定的状态。图3(b)为周期测试的最后50个循环并股人工肌肉的收缩量,从图中可以看出并股人工肌肉纤维的拉伸性能保持在7.5%左右。图3(c)为20%的拉伸应变下螺旋纤维通电前后的循环拉伸曲线,拉伸速率为5 mm/min。从图中可以看出,并股人工肌肉纤维在进行通电前在经历了第一次拉伸循环后的残余应变较大,但随着循环次数的增加,螺旋纤维的残余应变逐渐减小。从第二次循环开始,并股人工肌肉纤维的残余应力基本没有明显变化,说明纤维在此应变下可以保持很好的弹性和稳定性。而通电循环拉伸后有类似的现象,且变化不是很大,说明并股人工肌肉纤维循环拉伸性能较好。
2.4 编织人工肌肉
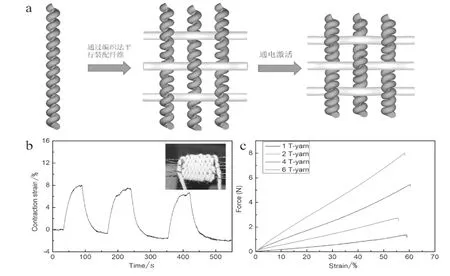
(a)编织人工肌肉的概念;(b)六根纤维肌肉与棉线编织物伸缩率,插图为基于人工肌肉及棉线的编织物照片;(c)测量单根、两根、四根、六根人工肌肉并联的拉伸性能。
图4 人工肌肉的编织
Fig.4 Knitting and weaving of CNT/Nylon artificial muscle fibers
并股人工肌肉纤维的性能展现出许多可能尝试的应用,例如可以无声的打开或者关闭百叶窗。另外,由于尼龙纤维价格低廉并且容易加工成高冲程的人工肌肉,这些优势可以促使卷曲纤维肌肉在驱动纺织品和编织物中的应用。图4(a)通过编织的方式制造一种新型的纺织品驱动器,通过将单根肌肉纤维进行平行组装。图4(b)插图显示了径向由6根并股人工肌肉纤维纬向由普通毛线制成的纺织品。同时经过测试,通电电流为0.12A,施加54.3MPa的压力时,编织物显示出8.5%的伸缩率。在纺织技术的一个特点便是它允许合理的平行组装纤维从而增加驱动器的承受的总力,同时可以保留单根纤维高比表面积高体积比的优点。为了说明这种效果,我们采用最简单的方式进行组装,比较了单根纤维和不同数量的垂直纤维。从图4(c)中可以发现,绝对输出力增加并且与编织中平行组装的纤维的数量成比例。例如与单根纤维(1.35 N)相比,具有两根,四根,六根平行纤维的编织物表现出2.72 N,5.46 N,8.01 N的力。此外,纺织品组件的纱线与纤维的交织结构使驱动器具有稳定尺寸的结构,可以获得更稳定的操作。
3 结论
总之,在这项工作中,我们使用尼龙纤维和作为加热源由浮动化学气相沉积法制备的碳纳米管纤维制备了螺旋形驱动器。在这种情况下,使用碳纳米管纤维通过焦耳加热的方式可以实现高达14.2%的拉伸致动,制造并股人工肌肉纤维仅需要尼龙线,马达,碳纳米管纤维和低压电源。通过实验表征,采用这种技术,观察到线性驱动达到14.2%,能量密度能达到538.1 J/kg。由于其较低的工作温度,驱动器与普通织物或导电弹性体复合不会发生热降解,同时根据其对温度的响应调节织物间的空隙,在智能织物领域有重要应用。
