机器人与腹腔镜辅助胃癌根治术中复杂部位淋巴结清扫对比研究*
2019-08-07张珂诚曹博卫勃陈凛
张珂诚 曹博 卫勃 陈凛
目前,手术仍是可能治愈胃癌的唯一方式。以腹腔镜手术为代表的微创外科技术在临床应用越来越普遍,中日韩美等国家胃癌微创手术占比也逐年递增[1]。对于拟行远端胃癌根治术的早期胃癌患者,《胃癌诊疗规范(2018版)》推荐腹腔镜可作为常规治疗方式[2]。对于进展期胃癌,CLASS-01 研究证实腹腔镜辅助胃癌根治术有减少术中出血和缩短住院时间等优势[3]。目前,相关专业学会已出版《中国腹腔镜胃癌根治手术质量控制专家共识(2017 版)》用以规范腹腔镜胃癌手术的临床应用开展[4]。
机器人手术是微创外科的另一具体形式。相比于腹腔镜技术,机器人手术拥有三维的高清视野、灵活的关节活动和舒适的操控平台。已有研究显示机器人辅助胃癌根治术能减少术中出血[5],但机器人手术的优势尚需更多研究数据进一步明确。本研究对比分析机器人辅助和腹腔镜辅助胃癌根治术近期疗效,以明确机器人技术在胃癌淋巴结清扫中的优势,为相关研究开展提供借鉴。
1 材料与方法
1.1 研究方案
回顾性收集2014年8月至2015年8月间收治于中国人民解放军总医院,且均由本课题组执行手术的胃癌患者资料。纳入标准:1)病理学明确诊断为胃癌的患者;2)CT、MRI 等影像学发现无肝、肺等远处转移;3)无既往胃部手术史;4)行腹腔镜或机器人辅助胃癌手术。排除标准:1)缓解症状、减瘤等姑息手术患者;2)合并其他肿瘤患者;3)病例资料不全的患者。
1.2 方法
1.2.1 手术方式 根据术前内镜、影像学定位及术中所见行远端、全胃或近端胃切除术以达到肿瘤根治。淋巴结清扫范围根据术前分期和术中所见行相应部位淋巴结清扫。远端胃切除中,D1 清扫第1、3、4sb、4d、5、6 和7 组淋巴结,D1+清扫D1、8a 和9 组淋巴结,D2清扫D1、8a、9、11p和12a组淋巴结。全胃切除中,D1清扫第1~7组淋巴结,D1+清扫D1、8a、9和11 组淋巴结,D2 清扫D1、8a、9、10、11 和12 组淋巴结。近端胃上手术中,D1清扫1、2、3、4sa、4sb和7组淋巴结,D1+清扫D1、8a、9和11组淋巴结。cT1N0肿瘤行D1或D1+淋巴结清扫,cT2~4或cN+行D2淋巴结清扫。所有患者均采用腹部小切口(<5 cm)方式完成标本取出和消化道重建。重建方式考虑不同胃切除范围和吻合张力等因素选择毕I式、毕Ⅱ式、Rouxen-Y 等。术后手术标本由外科医师进行淋巴结分组,送至病理科进行淋巴结的检取并按照第7版美国癌症联合会(AJCC)胃癌分期系统进行分期[6]。术后并发症根据Clavien-Dindo进行分级[7]。
1.2.2 资料收集 收集患者术前基线数据,包括年龄、性别、美国东部肿瘤协作组体力状况评分(ECOG)和美国麻醉医师协会评分(ASA),合并症和既往手术史等。术中数据,包括手术时间、出血量、术中输血、中转开腹(腹部切口>5 cm)等。术后数据,包括住院时间、病理分期、并发症等。
1.3 统计学分析
采用SPSS 22.0软件进行统计学分析。定量资料根据离散程度选择或中位数表示,组间比较选择t检验或Mann-Whitney检验。无序分类资料选择χ2检验或Fisher精确概率检验;有序分类资料组间比较选择Wilcoxon秩和检验。以P<0.05 为差异具有统计学意义。
2 结果
2.1 患者基线特征
共有61例机器人辅助胃癌根治术和235例腹腔镜辅助胃癌根治术患者纳入分析,患者基线资料见表1。两组患者在年龄、性别、体重指数等差异无统计学意义。机器人组和腹腔镜组中分别有23例(37.7%)和72例(30.6%)患者有合并症,分别有11例(18.1%)和39例(16.6%)患者有既往手术史。
2.2 围手术指标
两组围手术期指标比较见表2。机器人组平均手术时间为(244.9±53.2)min,显著长于腹腔镜组手术时间(212.1±53.8)min,两者比较差异具有统计学意义(P<0.001)。机器人组和腹腔镜组在术中出血、术中输血等指标差异无统计学意义,两组在淋巴结清扫程度上比较差异具有统计学意义(P=0.003)。机器人组中46例完成D1+和D2淋巴结清扫,腹腔镜组中169 例完成D1+和D2 淋巴结清扫。机器人组有2例患者因切除困难和1例患者因术中出血中转开腹;腹腔镜组有3 例患者因严重腹腔黏连,2 例切除困难和1例术中出血而中转开腹,组间比较差异无统计学意义。机器人组中30例(49.2%)行远端胃切除术,腹腔镜组中119 例(50.6%)行远端胃切除术,两组间比较差异无统计学意义。机器人组和腹腔镜组首次排气时间分别为(4.6±1.1)d和(4.4±0.9)d,首次进食时间分别为(5.3±3.7)d和(5.8±4.1)d,组间比较差异均无统计学意义。机器人组和腹腔镜组分别有7 例(11.9%)和29 例(12.3%)并发症,Clavien-Dindo 分级后,腹腔镜组并发症严重程度更高(P<0.039)。
2.3 病理学指标
术后病理方面,术后病理T分期、N分期和TNM分期,两组间比较差异无统计学意义(表3)。机器人组近端和远端切缘分别为(3.2±2.3)cm和(6.9±3.7)cm,腹腔镜组近端和远端切缘分别为(3.9±2.7)cm和(6.7±3.1)cm,组间比较差异均无统计学意义。机器人组淋巴结清扫(36.3±10.8)枚,腹腔镜组淋巴结清扫(33.1±11.2)枚,两组比较差异具有统计学意义(P=0.046)。机器人组复杂部位淋巴结清扫枚数(11.8±4.3)枚多于腹腔镜组(10.3±5.2)枚。进一步分析行D1+和D2手术病例,机器人组在远端胃和全胃切除术中,第10组脾门淋巴结清扫和第11组胰腺上方淋巴结清扫枚数显著多于腹腔镜组(P<0.05,表4)。
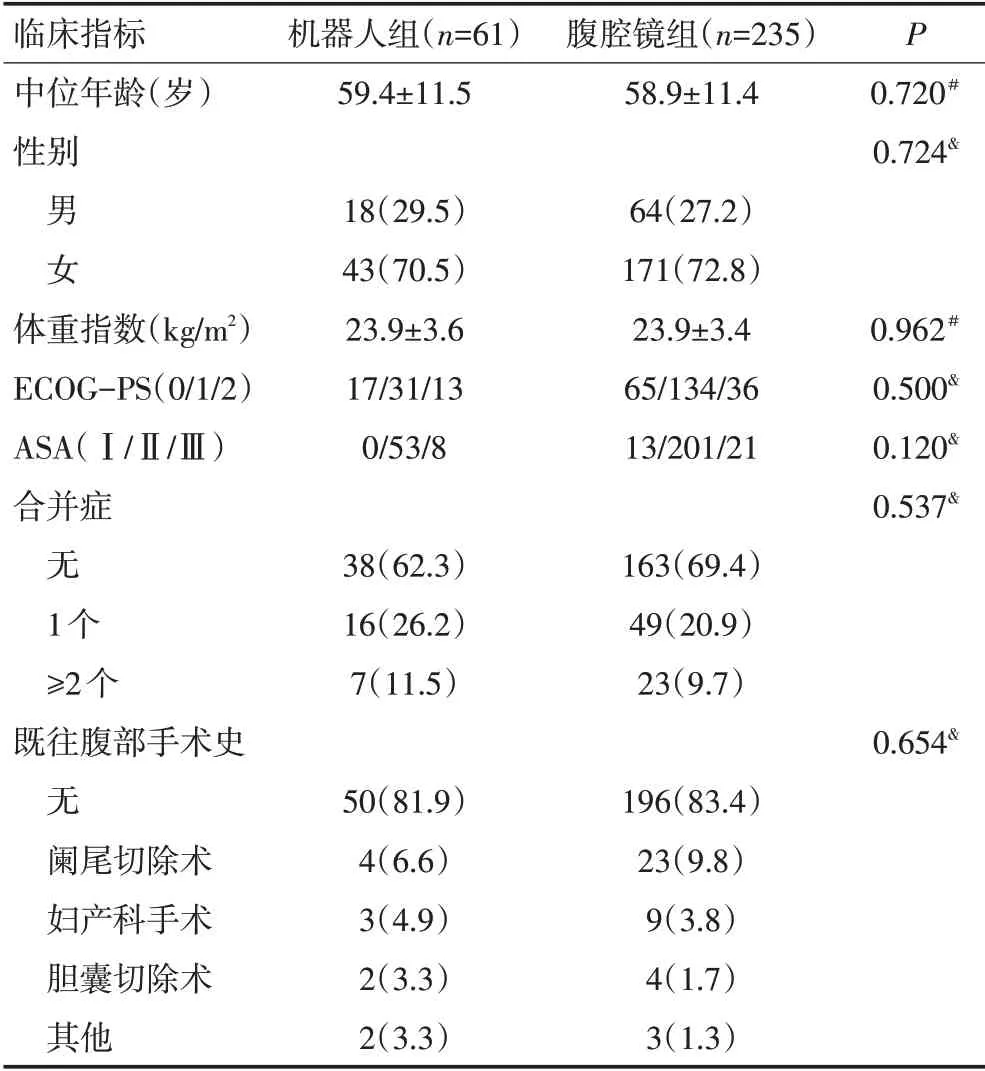
表1 患者临床病理特征
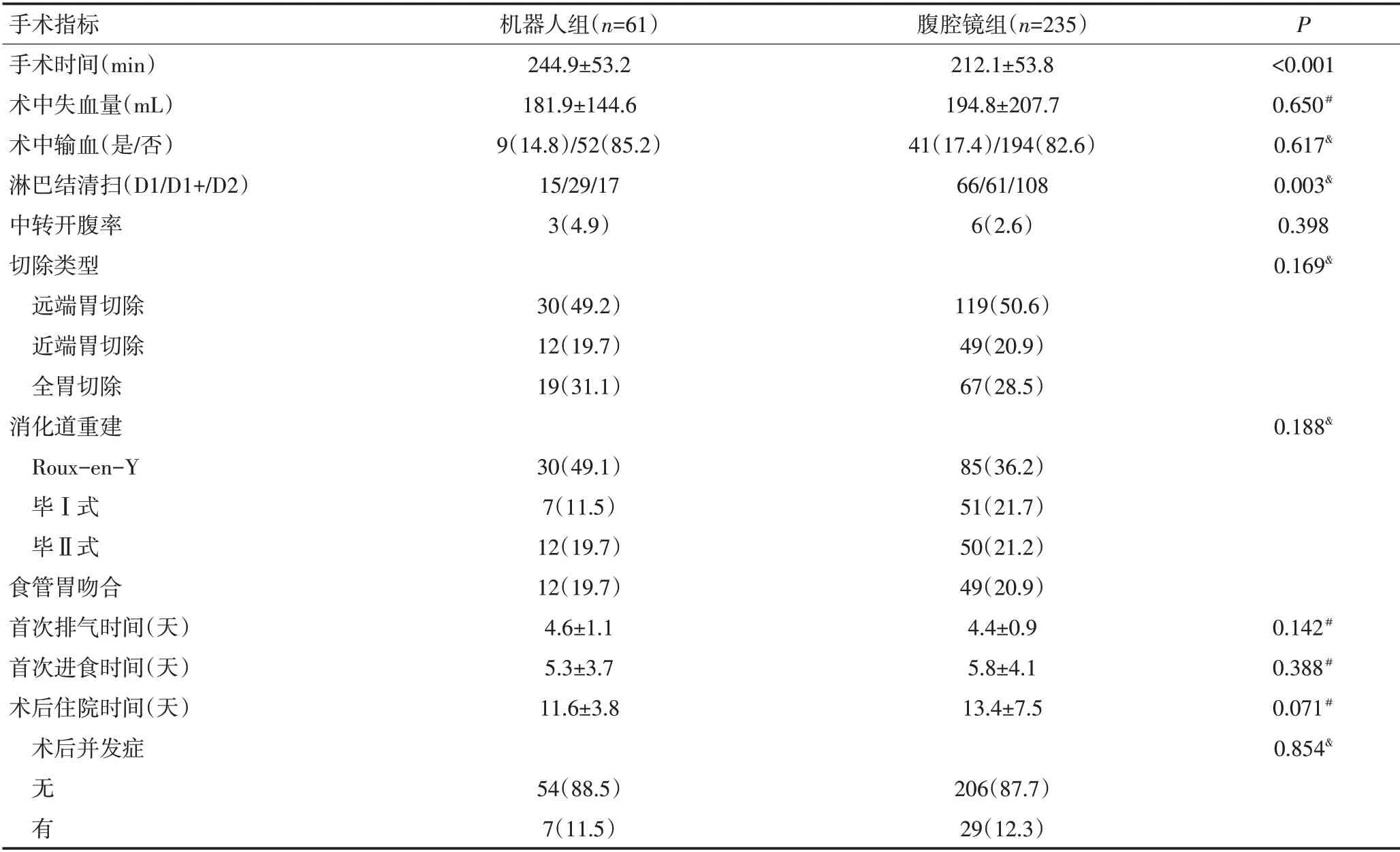
表2 手术指标对比
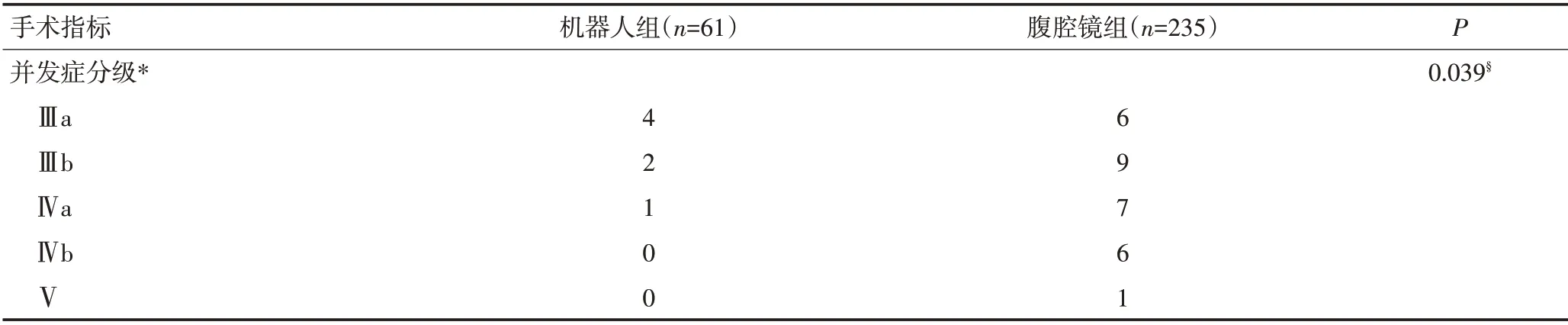
表2 手术指标对比(续表2)
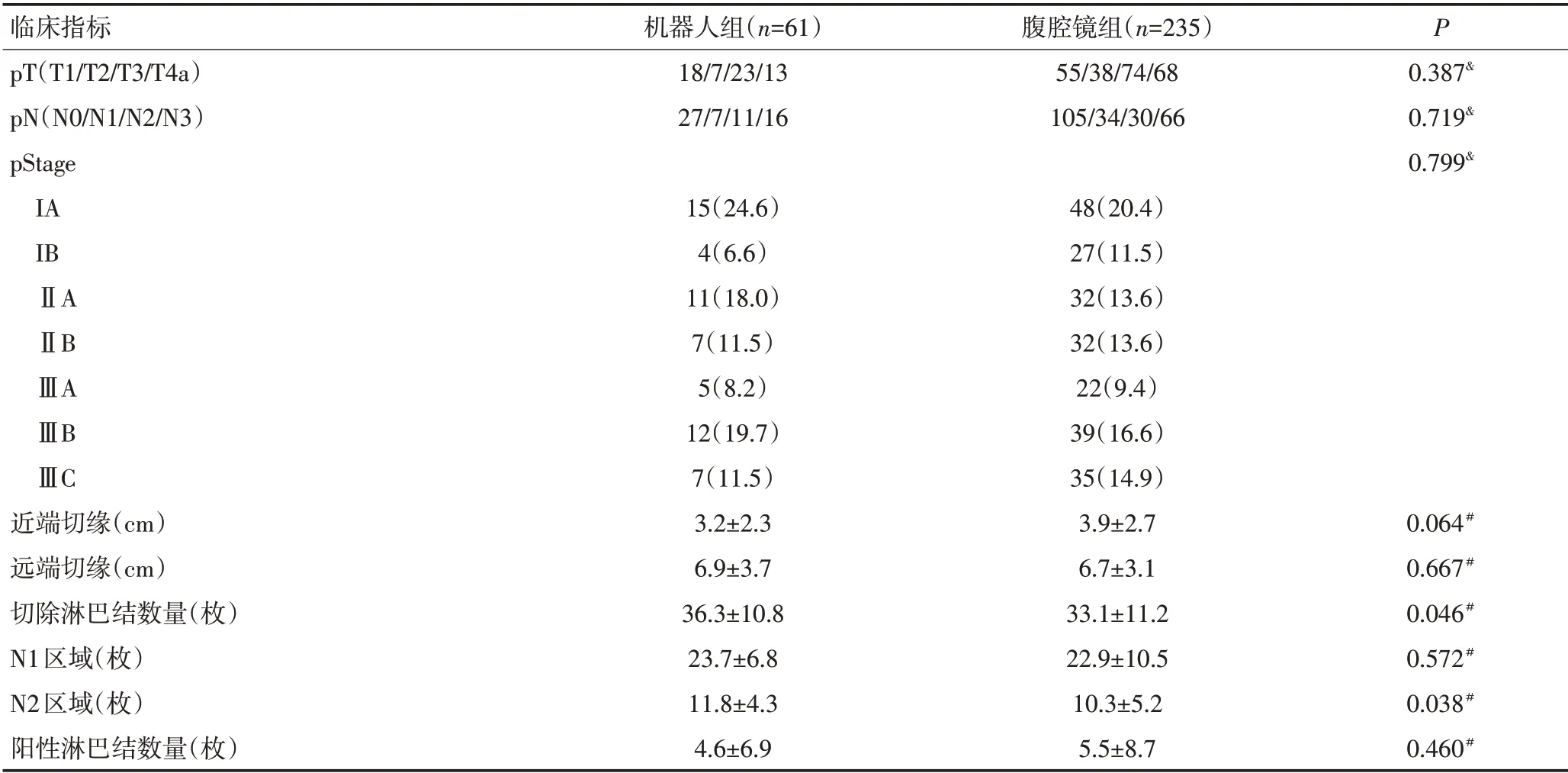
表3 病理学和肿瘤学结果

表4 N2区域淋巴结清扫数量 (枚)
3 讨论
近年来,显示设备和腹腔镜手术器械的发展推动了腹腔镜手术在临床的广泛应用。胃癌手术中,韩国多中心KLASS-01研究结果表明,腹腔镜辅助远端胃癌根治术术后并发症比开放手术降低[8]。基于已有的循证医学证据,腹腔镜远端胃癌手术也是cⅠ期者的可选手术方式之一。本中心自2000年初开展腹腔镜手术[9],初步显示了腹腔镜胃切除术的可行性,但局限于当时显示设备较差,并未广泛开展。近年来,随着相关设备的更新,本中心胃癌手术微创率已达65%以上。2002年,Hashizume 等[10]首次利用机器人辅助胃癌根治术。由于其具有独特的精准性和便捷性,机器人辅助技术迅速在全球范围内推广普及[11-12]。
规范的淋巴结清扫是确保肿瘤根治性的一个重要因素,淋巴结检出数量则是反映淋巴结清扫规范性的有效指标之一。足够的淋巴结检出有助于准确分期,避免分期迁移。美国国家综合癌症网络(NCCN)指南推荐至少检取出15 枚以上淋巴结[13]。本研究中机器人组和腹腔镜组检取出淋巴结数量均超过30 枚,与其他研究结果类似[8]。相比于过去胃切除后标本整体送检,2014年开始,本中心采取淋巴结分组送检,提高了淋巴结总体检出数量。Afaneh等[14]也报道体外的淋巴结分组送检可最大化淋巴结检出数量。近来,本中心采取了淋巴结的二次分拣,即由手术医师首先分组,然后进行淋巴结检出工作,随后送至病理科,阶段性结果显示二次分拣可进一步提升淋巴结检出数量[15]。此外,相比于腹腔镜组,机器人组检出淋巴结数量更多,细化分析比较显示机器人在远端胃和全胃切除术中,对第10 组脾门区域和第11 组胰腺上方区域更具优势。推测原因是,相比于腹腔镜笔直的操作器械,机器臂腕关节活动和三维的显示画面更利于复杂部位淋巴结精细清扫。脾门和胰腺上方区域位置深,血管走形复杂,这些部位淋巴结清扫困难,而机器人手术平台包括震颤过滤的诸多优势则有助于克服这些困难。
足够的肿瘤切缘也是影响肿瘤根治性的重要指标。本研究结果显示,机器人辅助与腹腔镜辅助胃癌根治术肿瘤根治性可比,短期预后相当。另外,本研究的机器人组和腹腔镜组平均近端切缘均超过了3 cm,两组间比较也无显著差异,表明机器人手术可达到与腹腔镜手术同等的肿瘤学安全切缘。此结果与韩国开展的多中心前瞻性研究报道一致[8]。
综上所述,机器人和腹腔镜辅助胃癌根治术的短期预后无显著差别。尽管机器人辅助方式的手术时间较长,但是术后并发症程度较轻,淋巴结清扫能力进一步提升,尤其是对于某些解剖结构复杂、技术要求较高的部位,如脾门和胰腺上方区域等,机器人辅助技术更是具有独特的优势。本研究为回顾性研究,治疗分组存在潜在的偏倚风险,且样本量有限,机器人和腹腔镜辅助胃癌根治术的优劣比较仍有待进一步证实。
