原子干涉重力测量技术研究进展及发展趋势
2019-08-01李嘉华姜伯楠
李嘉华,姜伯楠
(1.中国航天科技集团有限公司量子工程研究中心,北京100094;2.北京航天控制仪器研究所,北京100039)
0 引言
高精度重力测量在地表的重力场模型建立与完善、物理常数G的测定、自然灾害预警、矿物勘探、大地水准面绘制、惯性导航与定位等诸多领域有着广泛的应用。作为测量重力值的仪器,重力仪的种类很多,原理也不尽相同,但目前基本可以分为绝对重力仪和相对重力仪两种类型。石英弹簧和零长弹簧的相对重力仪的测量灵敏度能够达到10-9g/Hz1/2,但其会因弹性疲劳而引发零点漂移[1-2];超导重力仪的测量灵敏度可达10-9g/Hz1/2,但其体积大,可移动性差[3]。相对重力仪存在固有漂移,需要频繁地进行校准,且校准需要同时获取定位信息和本地重力值;绝对重力仪测量的是绝对重力值,其原理是等时间间隔测量3次自由落体的位移,再根据牛顿运动定律推算加速度。目前,高精度绝对重力仪主要可分为激光干涉重力仪和冷原子干涉重力仪两类。
目前,最为精确的激光干涉重力仪是美国Micro-g&LaCoste公司的FG5-X,其测量精度可达2×10-9g[4],需要进行周期性的比对和校准,稳定性、集成性和可移动性差。冷原子干涉重力仪是最近20年基于激光冷却原子技术发展起来的一种新型重力仪,其在真空中下落或者上抛一团冷原子以实现冷原子团的干涉,通过精确测量冷原子团的位移以实现高精度的绝对加速度测量[5-9]。早期的原子重力仪体积庞大,随着新技术的涌现,小型化、可移动的原子重力仪开始出现。目前,冷原子干涉重力仪的性能已可达到FG5-X的水平,其集成性更好,系统组装和调试更为简单,更适合移动运输,应用前景广阔。
1 工作原理
原子干涉重力仪建立在原子的量子态理论和原子受激Raman跃迁理论基础上,通过激光与原子相互作用,利用冷原子来反演重力的作用。由于原子所处叠加态的干涉相位与运动路径中受到的重力加速度相关,检测原子的内态便可以获得重力加速度的信息,其干涉过程如图1所示[10]。
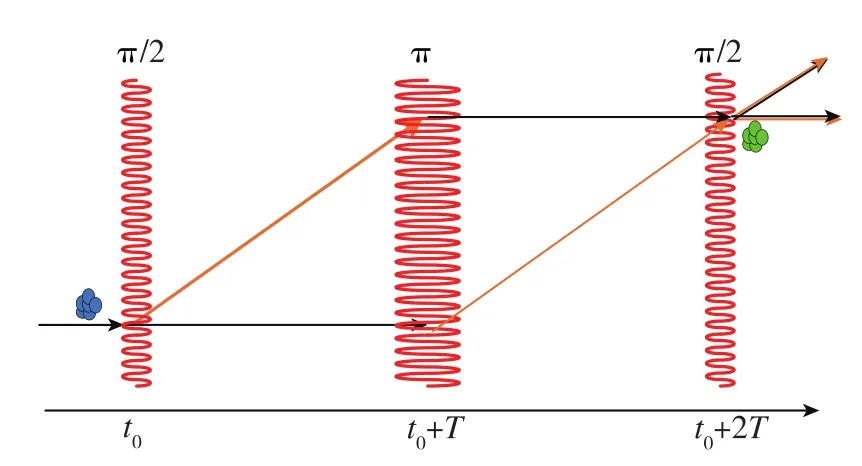
图1 原子干涉重力仪的工作原理Fig.1 Working principle of atomic interference gravimeter
具体的干涉过程主要可分为以下4个部分:
2)态制备。关闭磁场后,在原子受重力作用向下自由下落的运动过程中,经过态制备,原子团中处在对磁场不敏感的磁量子数为零的基态能级原子被挑选出来。态制备常用的方法有微波选态法。
3)原子干涉。使用π-π/2-π的Raman脉冲序列作用于冷原子,完成对原子团的分束、态反转、再合束的过程,期间干涉相位的调节通过对双光子Raman跃迁的频率啁啾而实现。在冷原子自由下落的运动过程中,to时刻先与第一束π/2脉冲Raman光作用,此过程类似于光学干涉仪中分束镜的作用,使原子与其相互作用后进行分束;T时间自有演化后,与第二束π脉冲Raman光作用,此过程类似于光学干涉仪反射镜的作用,使两条路径上的原子团进行态的转换;相等间隔T后与第三束π/2脉冲Raman光作用,完成干涉过程,原子处于两个态的叠加态。
4)末态探测。采用可以有效提高探测信号信噪比的归一化探测技术,测量包含重力信息基态上的原子数概率,得到干涉条纹S,其可被描述为加速度g的函数形式[10]

式(1)中,g为重力加速度,N为冷原子团的原子数,η为干涉信号对比度,T为干涉时间,keff为使原子产生干涉的Raman脉冲的有效动量。拟合干涉条纹便可以获得重力值。
2 国内外研究进展
美国Stanford大学的朱棣文研究组是最早开展冷原子干涉重力仪研究的研究组。1998年,该研究组的Kasevich等在实验室静态环境中实现了灵敏度为2.8×10-9g/Hz1/2的冷原子干涉重力仪[11-13];2014年,该研究组又完成了高度达10m的喷泉式冷原子干涉重力仪的搭建和测试工作[14],其灵敏度为6.7×10-12g/Hz1/2,已经与相对重力仪的灵敏度水平持平。
在不限制功耗的实验室静态环境中,冷原子干涉重力仪的实验室精度已经达到可以替代全球导航卫星系统(Global Navigation Satellite System,GNSS)的水平。但在实际应用的复杂环境中,面对恶劣的环境、温度、磁场变化等影响以及机载、星载等需求,SWaP(即体积Size,重量Weight,功耗Power)和采样带宽是限制冷原子干涉重力仪应用和实际精度的重要因素。
2008年,美国Stanford大学的Kasevich研究组首次完成了冷原子干涉器件的低SWaP集成化工作,研制出了第一台可用于转动、线加速度和重力梯度测量的集成化、可移动冷原子干涉惯性系统。他们在真空系统、激光系统和电控系统上均进行了大量的集成化工作,使得冷原子干涉器件可以装进一台小型的箱式货车,并进行移动。如图2所示,Kasevich研究组使用集成化、可移动的冷原子干涉器件进行了转动、线加速度和重力梯度的测量。在抑制共模噪声后,其线加速度测量灵敏度可达4.2×10-9g/Hz1/2,已十分接近C-SCAN的研究目标[15]。
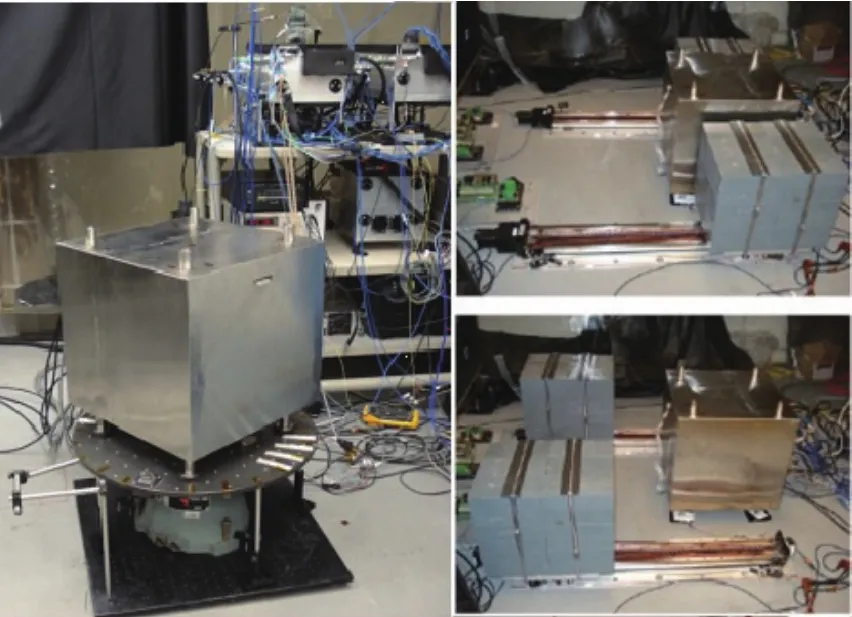
图2 Kasevich研究组使用集成化、可移动冷原子干涉器件进行实验测量Fig.2 Kasevich research group used integrated,portable cold atom interference devices for experiment measurements
2015年,LP2N、LNE-SYRTE和ONERA等初步完成了ESA的iSense研究计划,通过对真空系统、磁场线圈、激光系统、光学器件和电控系统的集成化,研制出了集成化、可移动的冷原子干涉重力仪。iSense与Kasevich研究组工作的最大不同在于原子芯片的使用,其通过原子芯片对冷原子操控系统的集成实现了降低SWaP的目的。iSense的理论灵敏度可达3.9×10-9g/Hz1/2,优于FG5-X,但体积仅为FG5-X的1/24.5,质量仅为其1/5.1,功耗仅为其1/2.1。
(二)浇水和中耕培土。定植后要及时浇水缓苗,水下渗后覆土。浇水或雨后进行中耕松土,在雨季前将笋垄培高15厘米左右。
与上述研究计划的思路不同,LP2N和LNESYRTE主持的MINIATOM研究计划着重于通过物理系统的简化而非组件的集成化来实现SWaP的降低。如图3所示,他们使用空心金字塔反射镜将复杂的传统冷原子物理系统简化为1个反射镜、1个液晶波片和1路激光。这一改进不仅大幅降低了重力仪的SWaP,而且实现了3×10-8g/Hz1/2的重力测量灵敏度和2×10-9g~3×10-9g的精度[16]。
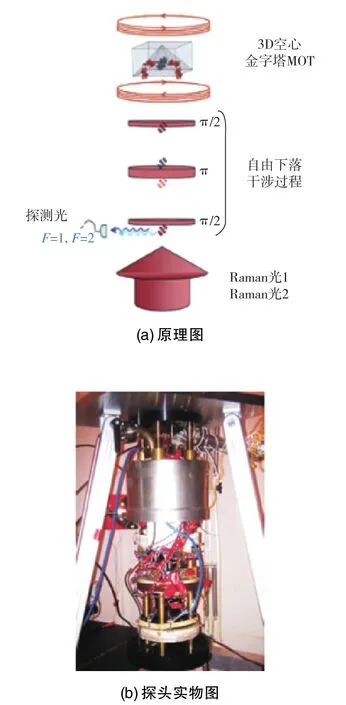
图3 MINIATOM冷原子干涉重力仪Fig.3 MINIATOM cold atomic interference gravimeter
在高采样带宽冷原子干涉器件的研究方面,New Mexico大学和美国Sandia国家实验室的Biedermann研究组致力于提高冷原子干涉器件的采样带宽,以增强其对真实动态环境应用的适应性。他们使用再捕获方法,适当降低干涉时间,以50Hz~100Hz的采样带宽,实现了0.9×10-6g/Hz1/2的加速度测量灵敏度[17]。如图4所示,与目前惯性导航系统中使用的导航级加速度计产品(如AnalogDevice的 ADIS16385和 Honeywell的QA2000、QA3000等)相比,高采样带宽类型的冷原子干涉器件在采样带宽方面已经可达到同一量级,且具有优于一个数量级的灵敏度[18-19]。

图4 高采样带宽冷原子干涉重力仪Fig.4 Cold atomic interference gravimeter with high sampling bandwidth
随着这些研究工作的推动,原子干涉重力仪已经开始实现商业化的应用。图5(a)为AOSense公司冷原子干涉重力仪的商业产品,该产品灵敏度优于10-9g/Hz1/2[20]。 图 5(b)为 muQuans公司推出的冷原子干涉重力仪产品AQG-A01[21],其探头体积为φ38cm×70cm,激光和控制电路的尺寸为100cm×50cm×70cm,质量为100kg,灵敏度约为5×10-8g/Hz1/2,长期稳定性为1×10-9g,是一款达到FG5-X性能水平的冷原子干涉重力仪产品。
同时,越来越多的实验小组尝试在实验室外的移动平台上对原子重力仪进行研究测试。据报道,在运动速度为1cm/s的移动卡车中已测得重力梯度[22];在零重力平面上实现了加速度的测量[23-24];在移动电梯中实现了低精度重力测量[25];在恶劣的海况下,在船上实现了灵敏度优于10-5g/Hz1/2的重力测量[26]。这些研究证实,原子干涉重力仪具有在移动平台上实现高灵敏度的绝对重力测量的潜力。

图5 冷原子干涉重力仪产品Fig.5 Products of cold atomic interference gravimeter
目前在国内,华中科技大学、武汉物理与数学研究所、浙江大学、中国科技大学、清华大学、中国计量科学研究院和北京航天控制仪器研究所等均开展了冷原子干涉重力仪的研究。上述研究主要从基础科学及国家对重力标准的需求出发,集中于固定式冷原子干涉重力仪上。华中科技大学的罗俊、胡忠坤研究组搭建的固定式冷原子干涉重力仪的灵敏度为4.2×10-9g/Hz1/2[27],达到了国际先进水平,但工程化、小型化可移动产品仍处于起步阶段。浙江大学是国内开展可移动冷原子干涉重力仪研究工作较早的单位[28-29],其研制的重力仪的灵敏度达到了1×10-7g/Hz1/2,但设备稳定性、环境适应性等各方面性能还需进一步完善,有必要引入新技术,进一步实现小型化、低功耗的需求。北京航天控制仪器研究所相继攻克了条纹锁相闭环、重力抑制、低相噪微波链路和快速跳频、高信噪比多组分原子成像、敏感轴噪声主动抑制等关键技术,实现了重力测量。2017年,华中科技大学、浙江工业大学、武汉物理与数学研究所等研制的原子干涉重力仪参加了由中国计量科学研究院在北京昌平组织的第10届全球绝对重力仪国际比对,取得了优于10μGal的成绩,与FG5-X相当。
目前,随着原子干涉重力仪工程化的迅猛发展,考虑到航空、航海应对数据空间分辨率等需求,原子干涉重力仪与传统加速计的互补工作模式有望成为解决其工程应用问题的主要手段。
3 关键技术
实现原子干涉重力测量涉及到冷原子团制备技术、Raman激光相位锁定技术和重力方向的Doppler敏感原子干涉技术等,目前这些技术均相对比较成熟。为了进一步研制SWaP和高采样带宽的原子干涉重力仪,还有很多技术需要攻克,如小型化超高真空技术、小型化高稳定激光技术、低相噪相位锁定技术、高性能的磁场屏蔽技术、低频隔振技术、闭环与噪声处理技术等[30]。这里主要介绍一下最关键的小型化超高真空技术、小型化高稳定的激光技术和闭环与噪声处理技术。
(1)小型化超高真空技术
高精度重力测量对系统真空度的要求很高,一般在无铷蒸汽释放时要维持在10-9Pa的超高真空水平。目前,常采用非蒸散型吸气剂(Non Evaporable Getter,NEG)技术与离子泵技术相结合而形成的复合泵技术,以减小真空腔的体积。此外,通过物理系统的简化(如空心金字塔反射镜法[16]),可大幅降低重力仪真空系统的复杂性。随着MEMS/MEOMS技术的提高,可引入低功耗的原子芯片、光栅芯片,使冷原子器件集成至芯片量级。如图6所示,Arnold研究组采用光栅原子芯片已可以将原子温度冷却到3μK,完全可满足干涉重力测量的需要,且可实现连续模式操作。在未来,结合原子导引技术有望实现集成化、鲁棒性、高带宽的惯性传感器[31]。
(2)小型化高稳定的激光技术
在小型化冷原子重力仪中,有必要使用满足低SWaP需求的碱金属原子波段激光器、光隔离器、光开关、激光频率控制和碱金属蒸汽压控制技术。图7为AOSense公司研制的模块化产品[20]。目前,常用通讯波段的DFB激光器作为光源,掺铒光纤放大器作为光功率放大器件,引入铌酸锂晶体进行光倍频技术方案,使激光系统更加紧凑、稳定。欧空局使用双种子光源(一个作为频率基准,另一个作为实际使用光源)方案,通过Offset Locking和YIG快速跳频技术实现了基于频率基准的吉赫兹(GHz)水平的快速跳频。引入单种子光源激光系统方案,可满足小型化、多轴加速传感的需求。

图6 Arnold研究组的光栅芯片磁光阱Fig.6 Grating MOT of Arnold research group
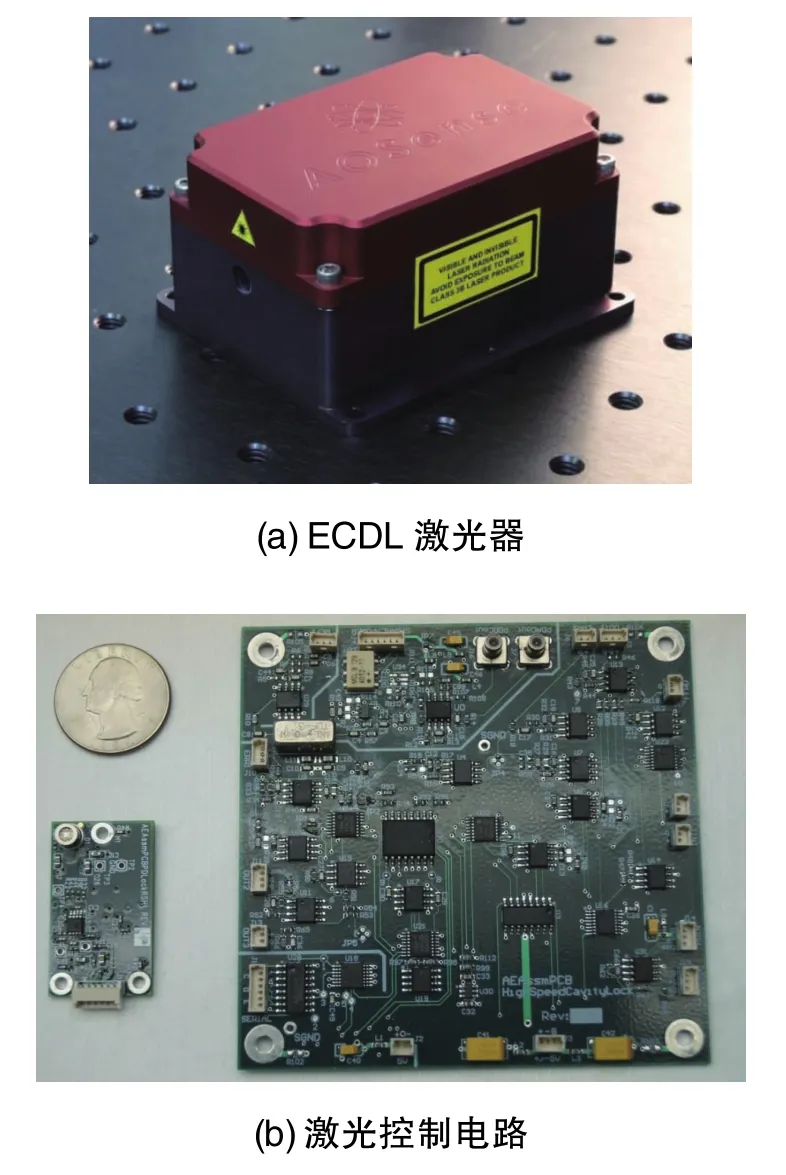
图7 AOSense公司研制的模块化产品Fig.7 Modular products developed by AOSense
(3)闭环与噪声处理技术
稳定的加速度测量需要对系统进行闭环,一般通过EOM施加一个扫频信号对加速度效应进行抵消,将原子干涉条纹控制在斜率最为敏感处,从而实现较高水平的灵敏度。但在较高的动态环境下,扫频的范围需要增大以适应较大的量程,锁定速度也需有相当的提升。同时,降低主要由Raman激光的AC斯塔克效应、幅度、相位调制、机械振动等引起的光学系统相位噪声也是提高重力测量灵敏度的关键。采用条纹锁定技术有助于快速时变信号的监测,提高采样率[32]。通过引入Kalman滤波技术,将原子干涉加速度计与传统加速度计互补使用,估计长时偏差漂移,可提高鲁棒性等[33]。
4 结论
原子干涉重力仪是基于冷原子物质波干涉的一种新型重力仪,具有稳定性高和精度高等特点。随着小型化可移动的高精度原子重力仪的出现,其在惯性导航、地震预报、全球重力场监控等领域有着广泛的潜在应用空间。研制低体积、低功耗的便携式原子干涉重力仪是主要的发展趋势。除了不断优化现有的实验装置、简化物理结构、研制小型化/低相噪的高精度样机外,有必要引入条纹锁定技术、低功耗原子芯片等新技术,以提高采样率,解决重力测量工作 “死区”的闭环问题,采用原子干涉重力仪与传统加速计的互补工作模式解决其工程应用问题。
