一类参数激励系统的非线性时滞反馈分岔控制
2019-07-09钱长照陈昌萍
钱长照,陈昌萍
(厦门理工学院土木工程与建筑学院风工程实验研究中心,福建厦门 361024)
0 引言
参数激励非线性动力学问题是工程中常见的一类动力学问题,常具有分岔、浑沌、分维和分形等复杂的非线性动力学行为[1-2].Nayfeh等[3]利用多尺度法详细研究含参数激励非线性动力系统的非线性特性,发现该类系统具有多种分岔模式和混沌现象.Sethna等[4]通过理论研究参数激励的van der Pol-Duffing系统的鞍-结分岔、叉形分岔、Hopf分岔等多种分岔模式.Holmes等[5]为深入研究含有参数激励的非线性动力系统的分岔与混沌问题,提出一系列研究方法.20世纪80年代中期,国内学者开始研究含有参数激励的非线性动力系统,在全局分岔的研究方法方面取得了一系列研究成果[6-9].
非线性参数激励系统中常见的分岔模式有鞍-结分岔和跨临界分岔,这些分岔在工程中表现为动力响应的跳跃、滞后及动力失稳,需要避免或加以利用.符文彬[10]针对非线性参数激励系统在稳态解的鞍-结分岔,提出利用受控系统Jacobi矩阵的非线性控制器设计方法.Ji[11]利用实验研究了基于梁端部滑模控制的轴向激励后屈曲梁这一类参数激励系统的分岔控制问题.
非线性系统的时滞控制方法在近些年来引起了人们的关注,有相关成果见诸报端[12],针对参数激励系统的线性时滞控制也有较少的研究[13-14],但未见有对于参数激励系统的非线性时滞控制的研究.因此,本研究讨论参数激励系统非线性时滞控制的理论性,比较了线性时滞控制器和非线性时滞控制器对一类参数激励系统分岔控制的优缺点,得到一些有益的结论.
1 平均方程及分岔方程的理论推导
一些工程问题,如受轴向激励的屈曲梁振动[11]、斜拉索的振动[15]等,利用无量纲化等方法,其运动微分方程可表示为参数激励和强迫激励联合作用的非线性系统:

考虑系统(1)受到时滞位移反馈控制作用,通过设计时滞反馈控制器,受控系统可写为:

式中:gi(i=1,2,3)为反馈增益;τi(i=1,2,3)为时滞量;g1u(t-τ1)为线性时滞位移控制项;g2uu(t-τ2)和g3u2(t-τ3)分别为两种非线性时滞位移控制项,每种时滞控制项分别对应一种时滞控制器,三种时滞控制器互相独立,可以自由组合.
为利用平均法分析控制参数及控制效果,引入小参数ε并使用参数代换如下:

则方程(2)可改写为:

为研究控制器对系统(1)的分岔控制作用,利用平均化方法,假设方程(4)的解可写为:



方程(6)求导得:

将方程(5),(6),(8)代入到式(4)并与式(7)联立,可得平均方程:


系统平均方程(9)、(10)用矩阵可以表示为:

其中:
分析平均方程可知,方程存在零解和非零解,分别对应于系统的零平衡点(0,0)和非零平衡点,其中非零解对应的平衡点(x*,y*)可由如下方程解出

其中,零解的稳定性可由线性化矩阵的特征方程判断:
由式(12)、(13)可见,非零解对应的平衡点(x*,y*)及零解的稳定性均与时滞反馈增益系数及时滞量有关.

其中:


方程(15)中μe和σe与控制器参数有关,但分别具有阻尼和频率调谐参数的意义,因此可定义为等效阻尼和等效频率调谐参数.
方程(14)除了存在平凡解a=0外,还可能存在非平凡解,并满足方程:

解方程(17),可得:

根据解的个数对(18)式讨论可知,当选定σe和μe时,随着参数激励幅值f的变化,系统可能从单一的零解变化为同时存在零解和非零解,还会出现多个非零解,即非受控系统存在折迭分岔和跨临界分岔两种分岔模式.以激励幅值为分岔参数,则折迭分岔点可由下式确定:

而跨临界分岔点处激励幅值fcrit也可由下式得到:

2 分岔响应分析
由于式(12)和式(14)均是比较复杂的非线性方程和非线性方程组,直接求解比较困难,需要依靠数值计算的方法才能求解.因此,利用数值方法,获得非控制系统分岔响应曲线如图1所示,计算所取参数值:μ =1.5,ε =0.1,α =- 1,β=0.1,p=1,ω0=1,g1=g2=g3=0,f作为变化的分岔参数.也就是说,该图反映了原系统的非线性分岔状态.
综合图1和相关研究[13],可明确如下几点:1)对某一给定频率,当激励幅值增加到某一数值fcrit(该数值由式(20)确定,如本算例中,当σ =-2时,fcrit≈6.45;σ =0时,fcrit≈5.33;σ =2时,fcrit≈6.63),系统发生动态失稳,由于该类分岔是零平衡位置从稳定状态转换为非稳定状态,在一定情况下必然发生,所以是无法消除的亚临界分岔.但从分岔图中可以看出,可以通过控制器设计增大(或减小)fcrit的值,即改变分岔点的位置,从而保证系统在一定激励幅值范围内具有较好的稳定性;2)从式(20)中可以看出,亚临界分岔点与μe有关,而μe与时滞控制器参数有关,因此在设计时滞控制器时主要考虑控制器参数对μe的影响规律;3)当σ取某些值时,如本例中,σ=-2时,在f=fT时,解的个数发生变化,即产生折迭分岔,其特征是系统由一个稳定的零解变成三个解,而且只有当σe<0时存在;4)折迭分岔对结构危害较大,需要消除.
为进一步研究折迭分岔特性,利用平均方程(9)、(10)分析平衡点附近的流形,如图2~4所示.

图1 非受控系统的分岔响应曲线Fig.1 Bifurcation curves of uncontrolled system

图 2 f=4.5,σ=2的流形图Fig.2 Manifold of uncontrolled system with f=4.5,σ=2

图3 f=6,σ=2的流线图Fig.3 Manifold of uncontrolled system with f=6,σ=2

图4 f=7.5,σ=2的流线图Fig.4 Manifold of uncontrolled system with f=7.5,σ=2
由图2~4可以看出,随着参数激励幅值f的增加,平衡点数目发生变化.当f<fT时,存在唯一的零平衡点,该平衡点为稳定焦点;当fT<f<fcrit时,存在5个平衡点,其中零平衡点为稳定焦点,2个非零鞍点和2个稳定结点;当f>fcrit时,系统有3个平衡点,其中零平衡点退化为鞍点,另外两个平衡点为稳定结点.这与通过方程(18)分析的平衡点个数一致.本例中,由方程(19)可解得fT≈5.38,由方程(20)可解得 fcrit≈ 6.45.
3 时滞反馈分岔控制分析
值得注意的是,参数μe,σe对分岔方程(18)的平衡点个数起决定性的作用,而参数μe,σe的大小可以通过时滞控制器控制.为控制系统分岔,可以利用方程(15)选择控制器类型和设计时滞参数.分析方程(15)可知,由于两种非线性时滞控制器对阻尼及频率调谐均与激励幅值有关.如果只存在参数激励f,不存在强迫激励p,则非线性时滞控制器起不到控制作用;而当同时存在强迫激励和参数激励时,非线性时滞控制器作用明显,而且控制效果与强迫激励幅值相关.为直观显示三种时滞控制器对系统分岔的控制作用,利用数值方法获得三种控制器作用下的系统分岔响应曲线如图5所示.
图 5中计算所取参数值:μ =1.5,ε =0.1,α =- 1,β =0.1,p=1.2,ω0=1,σ =2,τ1= τ2=τ3=π,各时滞控制器增益参数如图中所示.这样选取的目的是为了使各控制器分别独立工作,从而能够进行比较.图中,g1=g2=g3=0与原系统的分岔响应曲线对应;g1=g2=0,g3=5与非线性时滞控制器g3u2(t-τ2)单独作用下的分岔响应曲线对应,与原系统分岔响应曲线相比,消除了鞍结分岔点;g2=g3=0,g1=5对应于线性时滞控制器g1u(tτ1)单独作用,同样可以消除鞍结分岔点,同时跨临界分岔点也有较大的改变;g1=g3=0,g2=5对应于非线性时滞控制器g2uu(t-τ1)单独作用,未能消除鞍结分岔点,但鞍点 -结点共存区域减小.总之,各控制器均能对系统的分岔点进行控制.其控制参数的选取原则是根据方程(15)和方程(18)的讨论.一般而言,为控制操作方便,控制器可设计只对μe和σe其中一个参数进行控制,而使另一个参数保持不变,这就是选择时滞量为τ1=τ2=τ3=π的原因.因为,此时μe保持原μ值不变,而σe随增益参数改变.由图比较可知,该参数条件下,同等增益时,g3u2(t-τ3)控制器不仅能消除鞍结分岔,还使跨临界分岔点后移,即临界值增大,同时响应幅值减小,效果最好.但值得指出的是,这是在强迫激励幅值p>1的情况下进行的比较.事实上,由于两种非线性控制器控制效果均与强迫激励幅值有关,因此只能用于该类有强迫激励的参数激励系统中,而且强迫激励幅值越大越好.
为直观显示各时滞控制器对阻尼及频率参数的调谐控制作用,取μ=0,σ=-2作时滞参数,对μe、σe的影响曲线如图6、7所示.

图5 受控系统分岔图Fig.5 Bifurcation curves of controlled system
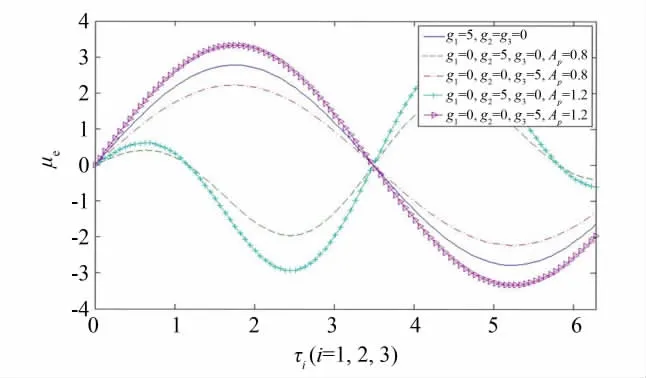
图6 μe随时滞参数变化曲线Fig.6 μechanged with delay parameters

图7 σe随时滞参数变化曲线Fig.7 σechanged with delay parameters
由图6~7可以看出,对于参数激励和强迫激励联合作用的非线性动力系统,各类时滞控制器的时滞参数均对μe,σe有调节作用,但线性时滞控制器的调节范围只取决于控制器本身的增益参数和时滞量,而非线性控制器的调节范围不仅取决于控制器本身,还与强迫激励幅值p有关,强迫激励幅值越大,调节范围越大,相应地,对于选定时滞量情况,控制效果越好.
4 结语
以参数激励幅值为分岔参数,研究参数激励和强迫激励联合作用的非线性振动系统的分岔特点.结果表明,系统存在跨临界分岔和鞍结分岔两种形式.通过分岔控制方程,利用增益参数设置,分析线性时滞控制和非线性时滞对等效阻尼及等效调频参数的影响,得到了一些有意义的结论:
1)对于参数激励和强迫激励联合作用的非线性系统,线性时滞控制器和非线性时滞控制器均可以改变系统的等效阻尼和等效频率调谐参数,也就是说,均能对系统的分岔进行控制.
2)线性时滞控制器对阻尼及频率调谐参数的控制范围只与控制器本身的增益有关,而非线性时滞控制器的调节范围还与强迫激励幅值有关.强迫激励引起的强迫振动幅值越大,时滞控制的调节范围也就越大,相同条件下更有利于系统的分岔控制.
3)当强迫激励幅值趋于零时,所设计的两类非线性时滞控制器失去作用,因此,建议把线性和非线性时滞控制器联合使用.
