舵半浸没推算分析
2019-07-03
(上海船舶研究设计院,上海 201203)
国际海事组织(IMO)海上安全委员会(MSC)针对SOLAS第Ⅱ-1章、C部分第29.3.2 & 29.3.4条就有关主操舵装置的能力,提出了在船舶航行试验时有关操舵装置的试验要求。当船舶无法满足“在最深航海吃水(满载工况)”的情况下,对主操舵装置补充了3种可接受的试验条件。国际船级社协会(IACS)颁布了有关该决议修正案的统一解释修订版SC246(rev.1),对这3种试验条件推出了进一步解释及可执行的推算的方法,并要求2017年1月1日及以后签订建造合同的船舶都要统一执行[1]。
试验条件中第2条,当舵叶浸没高度无法满足试验条件时,允许运用公式推算出在满载工况下的舵系统的转矩及系统压力。推算公式中余量系数取值成为焦点,为此,进行相关分析。
1 技术背景
1.1 原有的推算方法
在2011—2015年间,主操舵装置的能力都是通过实测的压载工况下执行机构处的系统油压来作为推算满载工况下的舵系统转矩(水动力转矩)依据,即
(1)
式中:TF为在最深航海吃水(结构吃水),主机最大持续转速及最大设计螺距对应航速下,舵机发出的转矩;QF为上述工况下的舵系统转矩(水动力转矩);pF为上述工况下的系统最大工作油压;TT为在试航状态(压载吃水),主机以最大持续转速及最大设计螺距对应航速下,舵机发出的转矩;QT为上述工况下的舵系统转矩(水动力转矩);pT为上述工况下的系统最大工作油压
1.2 原有推算方法的缺点
舵机的转矩计算公式[2]。
(2)
由式(2)可知,系统的油压p和舵机发出的转矩T成正比,但舵机转矩T和舵水动力转矩Q之间,并非存在简单的线性正比的关系,因为还有如下因素没有考虑。
1)舵机转矩T和舵水动力转矩Q之间的关系:Q=T-R;R为舵承处的摩擦损失。
2)现有的计算舵力及舵系统转矩都是基于舵叶在全浸没状态下得出的经验公式。实际试航过程中,舵叶处于半浸没状态,在水面以上部分的舵叶也会受到风和浪的作用,而这部分舵力及舵系统转矩并没有考虑在内。
3)试航过程中,船厂只记录系统油压的最大值(峰值),而对应的舵角并没有同时记录。
4)不同类型的舵机,发出的最大工作转矩时的角度各不相同,会产生偏差。
这种通过实测的系统油压来推算满载状态下的舵系统的受力和转矩的方法,其实没有真实反映船在满载工况下的舵系统的实际受力和转矩,存在一定缺陷,即pF/pT≠QF/QT。
2 新推算公式解析
2.1 推导过程简化
主操舵装置的3种可接受的试验条件如下。
1)当船舶处于平浮状态,95%舵叶面积浸没在水下,以主机最大持续转速及最大设计螺距下对应的航速进行试航,如果舵机执行机构处测得的系统油压不大于最大工作压力,即可认为舵机容量是足够的。
2)当舵叶浸没高度无法满足条件1)时,需要运用下列公式推算出在满载工况下的舵系统的转矩及系统压力。
(3)
QF=QTα
(4)
pF=αpT
(5)
式中:α为推断因子;AF为最深航海吃水下,可移动部分的舵叶全浸没侧投影面积;VF为在最深航海吃水下,以主机最大持续转速及最大设计螺距下对应的航速;AT为试航状态下,可移动部分的舵叶半浸没侧投影面积;VT为在试航状态下,以主机最大持续转速及最大设计螺距下对应的航速;允许通过CFD研究来推算出在满载工况下的舵系统的转矩。相关的计算报告需送船级社认可。
条件2)是大部分船舶(液货船除外)需要采取的方式。式中余量系数统一取1.25。
IACS出台该推算方法的技术背景资料及公式推导过程为
(6)
式中:R为舵承处的摩擦(力矩)损失;θ为舵角;k3为系数,视展舷比λ而定;ρ为海水相对密度;V为航速;δ为水流作用在舵上的有效攻角;X为力臂。
为简化公式的推导过程,假定在2种工况(满载状态和试航状态)下,舵承处的摩擦(力矩)R损失不变;水流作用在舵上的有效攻角δ及力臂X也不变;k3与展舷比λ有关,而展舷比λ又与与舵的浸没面积A有关,得到
(7)
1)在试航状态下,舵机液压系统最大工作油压与舵角θ、航速V及舵的浸没面积A有关。
2)式(7)中系数1.22与舵角θ有关。
3)式(3)中余量系数1.25源自公式(7)中的系数1.22,并取整。
2.2 余量系数选取及分析
若舵机出现最大油压时其舵角与舵机发出最大工作转矩时的舵角(35°)不一致,余量系数取1.22;若舵机出现最大油压时其舵角与舵机发出最大工作转矩时的舵角(35°)一致,余量系数取1.0;通过比较不同类型的舵机,分析在何种角度下发出的工作转矩最大,推算公式中余量系数取值是否合理。
1)柱塞式舵机(见图1)。
(8)
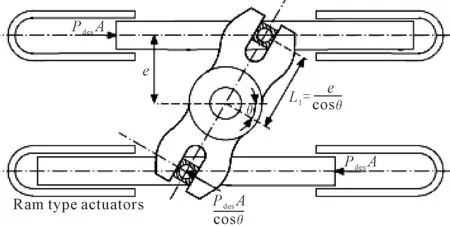
图1 柱塞式舵机结构及工作原理示意
由式(8)可见,舵机发出的转矩和舵角成正比,即舵角达到35°时,转矩即为最大工作转矩。
2)转叶式舵机(见图2)。
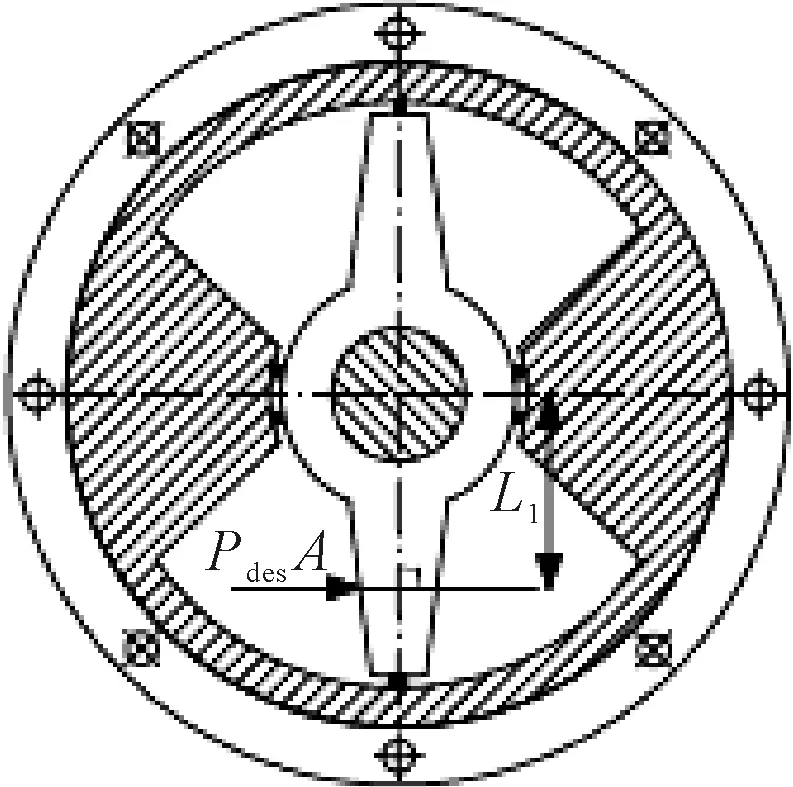
图2 转叶式舵机结构及工作原理示意
(9)
由式(9)可知,舵机发出的最大转矩为定值,与舵角没有关系。即最大油压出现在0°~35°舵角范围内任意一个角度。
3)摆缸式舵机(见图3)。
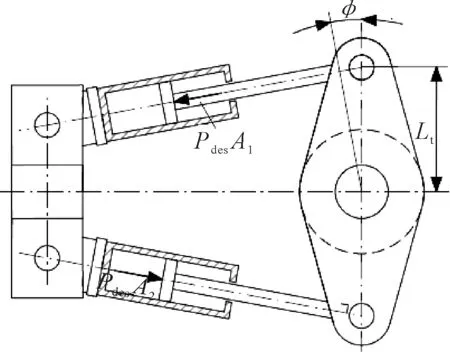
图3 摆缸式舵机结构及工作原理示意
(10)
由式(10)可知,舵机发出的最大转矩与油缸的零位角ψ有关,虽然与舵角θ没有直接关系,但当舵角达到35°时,油缸的零位角ψ最大,此时转矩为最小工作转矩。
4)舵叶水动力特性分析。
不同展弦比对NACA舵升力余量系数的影响见图4。
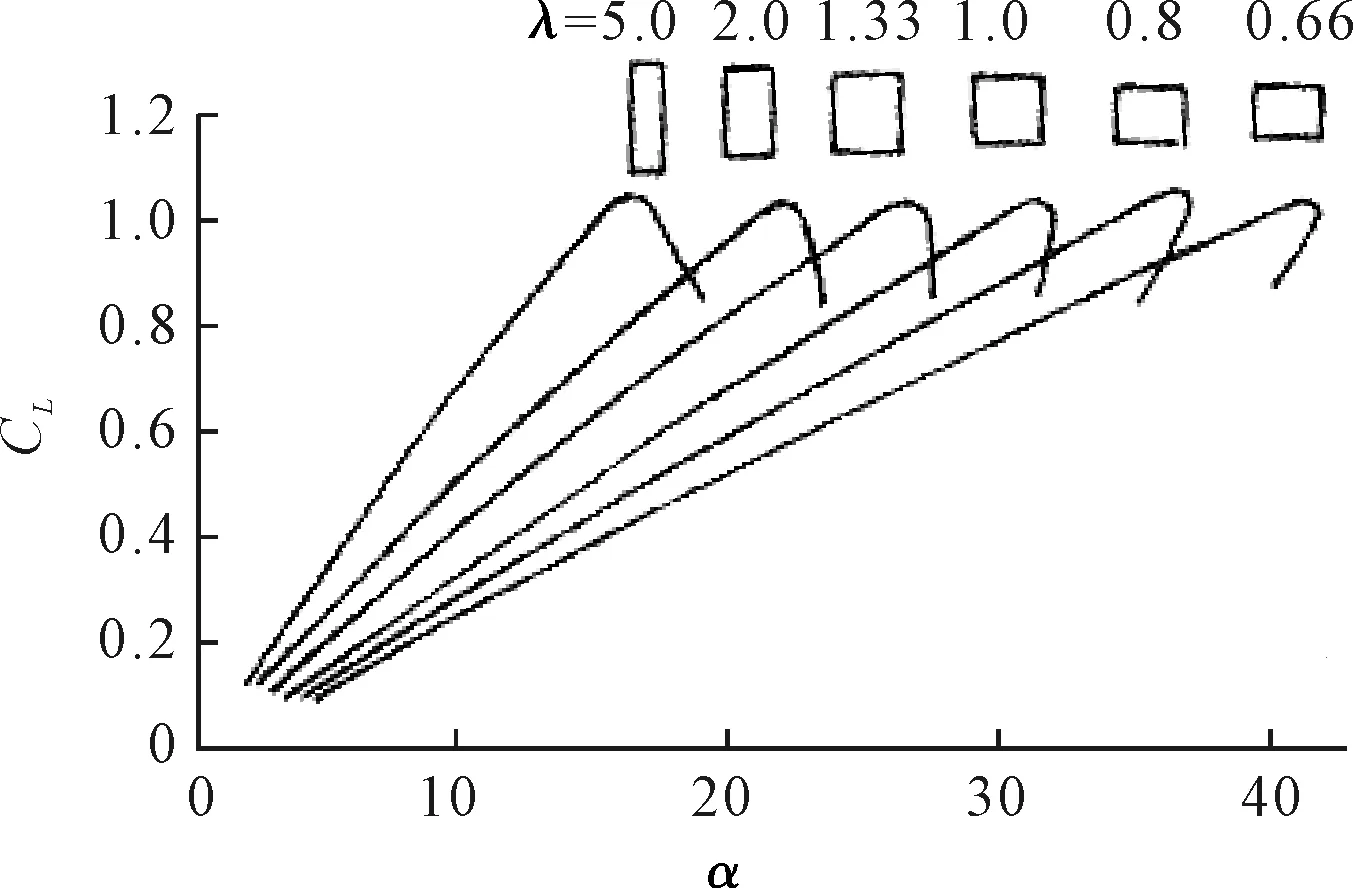
图4 展舷比对升力余量系数的影响[3]
常规设计的舵,一般其展弦比λ=1.5~2.0。由图4可见:
①当临界攻角在22°~26°时,升力系数CL达到最大值,此时舵水动力转矩Q最大。随后,尽管攻角α值继续增大,升力系数CL值则急剧下降。
②最大水动力转矩出现的角度和展弦比有关,即展弦比越大,越容易在较小的舵角出现最大水动力转矩。
③个别舵设备(如BECKER舵),由于舵剖面形状和固定方式不同,最大水动力转矩出现的角度为20°。
5)舵叶的水动力转矩及不同类型的舵机转矩比较见图5。
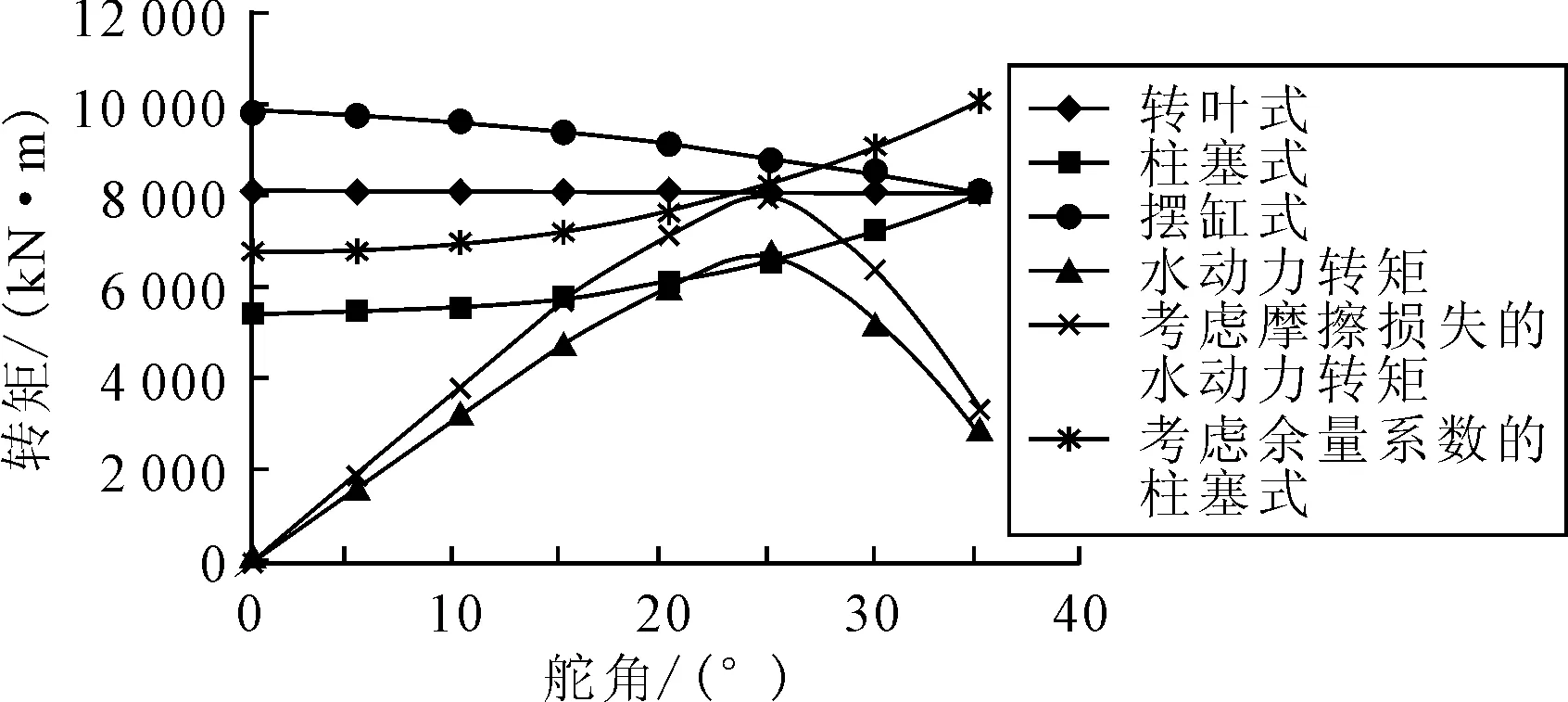
图5 舵的水动力转矩曲线及舵机转矩比较
结合图5可以得出以下结论:
①相同标称转矩(8 090 kN·m)的不同类型舵机,其最大工作转矩出现时的角度不同。柱塞式舵机在舵角35°时,达到最大工作转矩;摆缸式舵机在舵角0°时,达到最大工作转矩;转叶式舵机的最大工作转矩为定值,与舵角无关。
②柱塞式舵机发出的最大工作转矩时的舵角(35°)与出现最大水动力转矩时的舵角(22°~26°)不一致。根据式(8),两者相差1.2~1.28。为了让舵机在22°~26°时发出的转矩与35°时一样大,必然要加大舵机容量。式(3)中余量系数取1.25合理。
③转叶式舵机舵角在0°~35°范围内舵机发出的最大转矩是个定值,且大于最大水动力转矩值,因此式(3)中余量系数取1.0合理。
④摆缸式舵机发出的最大工作转矩时的舵角(0°)虽然与出现最大水动力转矩时的舵角(22°~26°)不一致,但舵角在22°~26°的范围内舵机发出的转矩比35°时大,因此式(3)中余量系数取1.25不合理,取1.0即可。
3 舵半浸没计算及计算数据修正方法
通过公式分析,在试航之前先预测出满载工况下的舵机系统油压值(该值仅供参考)。根据实航操舵试验数据,推算出满载工况下的舵机系统油压值。
以某系列矿砂船为例,介绍推算过程。
3.1 预测计算及实航推算
预测计算见表1。

表1 预测计算
1)表1为基于无风无浪工况下计算出来的理论值(仅供参考)。
2)表2为实航操舵试验的记录值。
3)表3是根据实航操舵试验的记录数据推算值。从推算结果可见,系统的最大油压已经超出舵机最大工作压力。
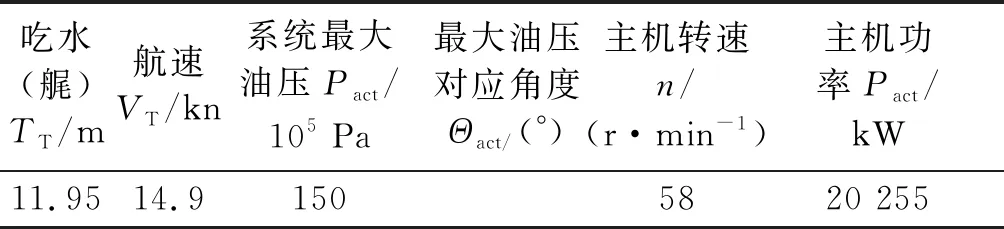
表2 实航操舵试验数据
注:①船模试验报告中读取。其中VF应为100% MCR下的航速;②舵系计算书中读取。为可移动部分的舵叶侧面积;③舵机资料中读取。为系统最大工作压力;④仅适用于2017年1月1日之前签订建造合同的船舶,之后应考虑余量系数;⑤理论预测值(仅供参考);⑥试航状态(压载吃水)下的舵机液压系统油压最大值(峰值);⑦推算出的满载工况下舵机系统油压最大值(峰值)。
4)通过跟踪某系列船型的舵机(柱塞式)试航试验数据发现,在试航过程中,有一部分舵机,其系统的最大油压没有超出舵机最大工作压力;但大部分舵机,都超出了舵机最大工作压力。
当推算出满载工况下的舵机系统油压最大值(峰值)超出舵机最大工作压力时,应允许对推算结果进行修正。
3.2 修正方法
推算公式中满载工况下的航速值VF从船模试验报告中读取,是无风、无浪及100%MCR下的航速理论值。其他数据都来源于实测的记录数据。
对于非液货船舶,航速测试及舵机试验通常在压载工况下进行,即使受到实际风、浪、流等海况的影响,基本都是主机的转速先到,而功率未到达对应值,即主机达到最大持续转速时,其功率值还没有达到最大值。此时有必要记录实际功率值(Pact),把船模试验报告中满载状态下,等同于记录值对应的航速用到计算中进行修正;当然,当主机达到最大持续转速时,功率值已经达到最大值,就无法再进行上述计算修正。
如果船模试验报告中满载状态下,等同于记录值对应的航速,用到计算中修正后,系统的油压仍然大于推算值时,此时还必须记录试验条件下风、浪、流等海况信息,进一步把满载状态下,等同于记录值对应的航速基于相同风、浪、流的海况进行修正,并把修正航速代入到计算中。
在操舵试验过程中,除了要记录舵机系统油压、舵角及船舶的航速等主要信息外,建议同时记录上述舵机试验航速下对应的主机转速、功率值以及风、浪、流等海况信息;在读取系统油压时,应记录所有执行机构处的压力表数值。
以上的推算过程及修正方法已成功地运用于该型系列船的舵机试航报告中,并取得了各船级社的认可。
4 新造船的舵机转矩选择
1)根据船模试验报告的相关数据,按式(3)和式(4)计算出推断因子及满载工况下水动力转矩。对于配置常规舵系统的船舶,柱塞式舵机,余量系数取1.25;转叶式及摆缸式舵机,余量系数取1.0。
2)对于配置非常规舵(如襟翼舵、鱼尾舵等)系统的船舶,应根据具体的舵水动力,以及最大水动力转矩出现时的舵角来确定柱塞式舵机余量系数。
3)舵承处的摩擦(力矩)R损失应额外考虑。
4)如果舵机厂家的理论转矩与实际发出的转矩不一致,余量应额外考虑。