改进型雷达二维恒虚警检测参考窗*
2019-06-25李光平
汪 洋, 李光平
(广东工业大学 信息工程学院,广东 广州 510006)
0 引 言
在雷达系统中,对统计检测的性能估计通常需要对目标和背景进行建模,雷达检波器中包含将接收到的回波信号幅值与固定门限值作比较,当幅度值高于固定门限值,则判定为目标存在,但在实际的雷达应用中,总会有许多不同类型的噪声和杂波出现的复杂环境背景,而且这些杂波将随着时间和空间的不同时刻改变[1],所以,一旦当这些不同种类的噪声和杂波高于固定门限值就会产生虚警。雷达目标恒虚警检测主要包括均值类和有序统计类。最早由Finn H M等人提出的单元平均恒虚警处理(cell-averaging CFAR,CA-CFAR)[2],在均匀的噪声和杂波背景环境下,CA-CFAR表现出了优异的检测性能,但在非均匀的杂波背景环境下,CA-CFAR的检测性能大大降低。Rohling H提出的基于有序统计的恒虚警处理(ordered statistics CFAR,OS-CFAR)技术[3]在非均匀杂波背景环境下表现出优异的检测性能,同时在多目标环境下也能表现出良好的检测效率。
本文提出了一种将CA-CFAR和OS-CFAR相结合的二维田字型恒虚警检测窗,并与传统的二维矩形窗通过实验进行了比较与分析。
1 经典的二维恒虚警处理模型和算法
1.1 自适应恒虚警检测模型
目标检测的主要任务是在距离—多普勒维数据所组成的距离—多普勒矩阵(range Doppler matrix,RDM)中的每个检测单元做出判决[4,5],目标检测的信号处理过程如图1所示。

图1 目标检测的信号处理过程
根据奈曼—皮尔逊检测准则[6],假设检验的判决结果由2种假设组成,即
y0H1
≥
H0TZ
(1)
(2)
1.2 二维CA-CFAR和OS-CFAR矩形参考窗
二维的恒虚警检测[7,8]首先需要准确地估计系统噪声水平以及确定好参考窗,常见的二维窗如图2(a)所示,是由M×N个参考单元组成的矩形参考窗,其中,M,N分别为距离维和多普勒维索引。
基于二维距离—多普勒参考窗的每个参考单元样本独立且都服从高斯分布,则在二维CA-CFAR处理下的每个参考单元平均干扰功率[9]
(3)
在图2(a)中,为了使平均干扰功率估计值更精确,通常在待检单元周围设置保护单元,这些保护单元在进行平均干扰功率估计时不代入运算。则二维CA-CFAR的虚警概率为
(4)
当利用OS-CFAR方法时,二维检测窗中不需要引入参考单元,需要对所有参考单元的杂波和噪声功率水平进行升序排列形成一个新的序列,并选取该序列中第K个功率值X(k)作为平均干扰功率的估计值,这样可以降低计算的复杂度[10]。则二维OS-CFAR的虚警概率为
pOSfa=p(Y0≥αOS·X(k))
(5)
2 改进的二维恒虚警检测参考窗方法
基于文献[11]提出的改进型二维矩形参考窗,其主要步骤是在距离—多普勒维上分别作OS-CFAR和CA-CFAR算法处理,将距离—多普勒维2个维度得到的结果相乘,然后估计杂波功率得到检测报告。如图2(b)所示,在二维矩形窗的基础上作出改进形成一种新的检测窗。
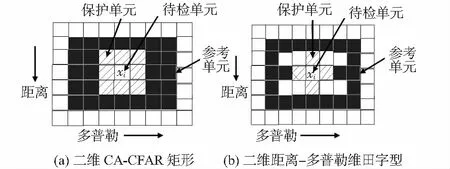
图2 二维CA-CFAR矩形和改进型参考窗
由于二维距离—多普勒矩形窗的参考窗数目过多且部分参考单元包含与判决无关的信息,在矩形窗中减少部分参考单元形成田字窗,可以使计算量减小也使得杂波功率能够更准确地估计。具体步骤如下:
1)在距离维和多普勒维分别作OS-CFAR和CA-CFAR处理,在对参考单元中杂波功率水平进行估计时剔除待检单元左上、左下、右上和右下的4个保护单元。
2)首先将距离维参考单元的功率水平进行升序排列,选出该序列中第K个值x(k)作为距离维背景杂波功率, 将标称化门限因子αCA与第(1)步得到的多普勒维杂波功率水平估计值相乘得到检测门限值ST,将低于门限值的数据归零并筛选出待检单元的真实目标。
3 外场试验
为了测试二维矩形参考窗和二维田字形参考窗的外场实际目标检测性能,将二维CA-CFAR和OS-CFAR检测方法运用到以上两种参考窗中。实验所使用的仪器为德州仪器的AWR1642雷达开发板,雷达发射波形为锯齿波,外部连接一个单片机作为控制模块,U盘存储雷达回波信号数据。雷达基本参数如下:载波频率f0:77 GHz;扫频周期:57.14 μs;扫频带宽:4 GHz。
实验场景如图3(a)所示,选择在空旷的室外,并选取2个测试人员作为检测目标。将AWR1642雷达模块置放在汽车引擎盖中间,该雷达的所能检测到目标的方位角为±60°。如图3(b)所示,2个测试人员站在车辆正前方。在图3(b)中,周围的树木以及铁栏杆均在雷达检测区域内,雷达所接收到回波信号将包含实际所检测到的目标和一些杂波加噪声。

图3 实际场景
如图4(a)所示,取图3(b)中的场景的一帧原始数据经过MATLAB进行处理可以发现2个尖峰值正好与车辆前方的2个测试人员相对应,在尖峰周围为检测区域内的部分杂波或噪声。下面利用二维矩形窗和二维田字窗处理方法分别对图3(b)中的实测数据进行处理,二维田字窗的仿真结果如图4(b)所示。结合图3(b)和图4(a)可得,在图4(a)中2个尖峰分别对应2个测试人员,这2个检测到的目标相对雷达的距离分别为6.497 m和7.587 m,相对雷达的径向速度为0.250 2 m/s。如图4(c)所示为二维矩形窗检测结果。
从图4(b)和(c)可以看到,利用二维矩形滑窗检测方法虽然能检测到实际场景中的2个真实目标,但图4(c)中却检测到5个目标,产生了3个虚假目标,对检测效率有一定的影响,通过在二维矩形窗的基础上剔除一些与检测判决无关的参考单元形成田字窗可以提高检测效率,对降低虚警概率起到一定的作用。
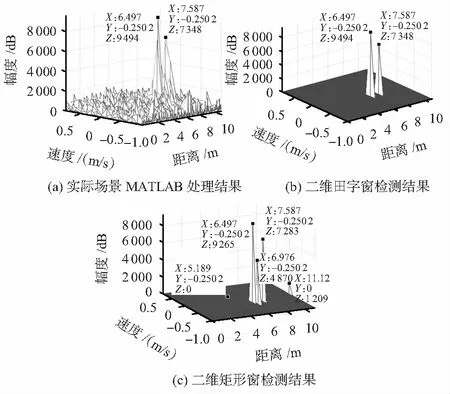
图4 实验结果
4 结束语
仿真结果表明:虽然两种参考窗均可以检测到测试车辆前方的目标,但由于二维矩形窗中部分参考单元与目标检测判决无关,则会产生虚警,而田字窗剔除掉这些与判决无关的参考单元后可以更精确地估计平均杂波功率水平,降低虚警概率。所以2种参考窗在进行恒虚警检测时,二维田字窗的检测效率更高。
