基于LabVIEW的太赫兹二维扫描成像系统设计*
2019-06-25胡子轩陈林宇
胡子轩, 邓 琥, 陈林宇
(西南科技大学 信息工程学院,四川 绵阳 621010)
0 引 言
太赫兹(THz)波是指频率在0.1~10 THz的电磁波,与X射线、红外和超声波等一样,可用于物体成像[1,2]。太赫兹波能量低,不会对材料产生物理性破坏,因此,太赫兹适用于非接触式无损成像检测[3,4]。太赫兹成像可分为脉冲成像和连续波成像两种方式,前者不仅可以得到样品的空间图像,还可以获取该样品的时域和频域信息,但成像速度很慢,不适合大尺寸样品成像;后者只能得到样品的空间图像,但成像速度快,能对较大尺寸样件成像[5,6]。LabVIEW作为一种图形化的编程开发语言,有助于缩短软件开发周期,广泛应用于仪表系统的自动检测与测控领域[7~9]。
本文采用基频为140 GHz的连续式太赫兹源,基于LabVIEW平台对锁相放大器和二维平移台进行二次开发,设计了太赫兹二维快速扫描成像系统。该系统成像速度快,分辨率较高,成像效果较好。同时具有结构简单、体积小、成本低和操作便利等优点。
1 系统硬件设计
太赫兹二维扫描成像系统的硬件主要包括5个部分:太赫兹发射源、离轴抛面镜、二维载物台及控制器、锁相放大器和太赫兹探测器。本系统的光路图如图1所示,小孔光阑B位于离轴抛面镜C1的焦点处,其作用是将太赫兹发生器A辐射出的太赫兹进行收束处理,变成理想的点光源;固定在二维载物台D上的待成像样品E位于离轴抛面镜C2和C3的共同焦点处;太赫兹探测器位于离轴抛面镜C4的焦点处。太赫兹波从A出射后,依次经过B,C1,C2,E,C3和C4,最后进入F。

图1 太赫兹二维扫描成像系统光路
太赫兹二维扫描成像系统由140 GHz的太赫兹发射源产生的电磁辐射,可选择是否经过3倍倍频器变为420 GHz太赫兹波;第三个离轴抛面镜对太赫兹进行聚焦,可在样品位置上得到一个点光斑,该样品搭载在一个可沿X,Y轴移动的线性位移台上;透过样品后的太赫兹波被收集进入太赫兹探测器,锁相放大器采集探测器的数据并将幅值信息传送至数据处理单元;每移动一次X轴或Y轴,系统会记录样品的当前二维坐标信息,同时记录此时锁相放大器提供的幅值信息,均存放到一个二维数组中;待二维扫描完成后,数据处理单元会对上述二维数组进行归一化处理,最终得到像素值在0~255范围内的太赫兹灰度图像。
2 系统软件设计
系统软件是由虚拟仪器LabVIEW设计而成,主要包括设备通信、样品扫描、二维图像重构和数据存储等4个模块,软件的设计流程如图2所示。
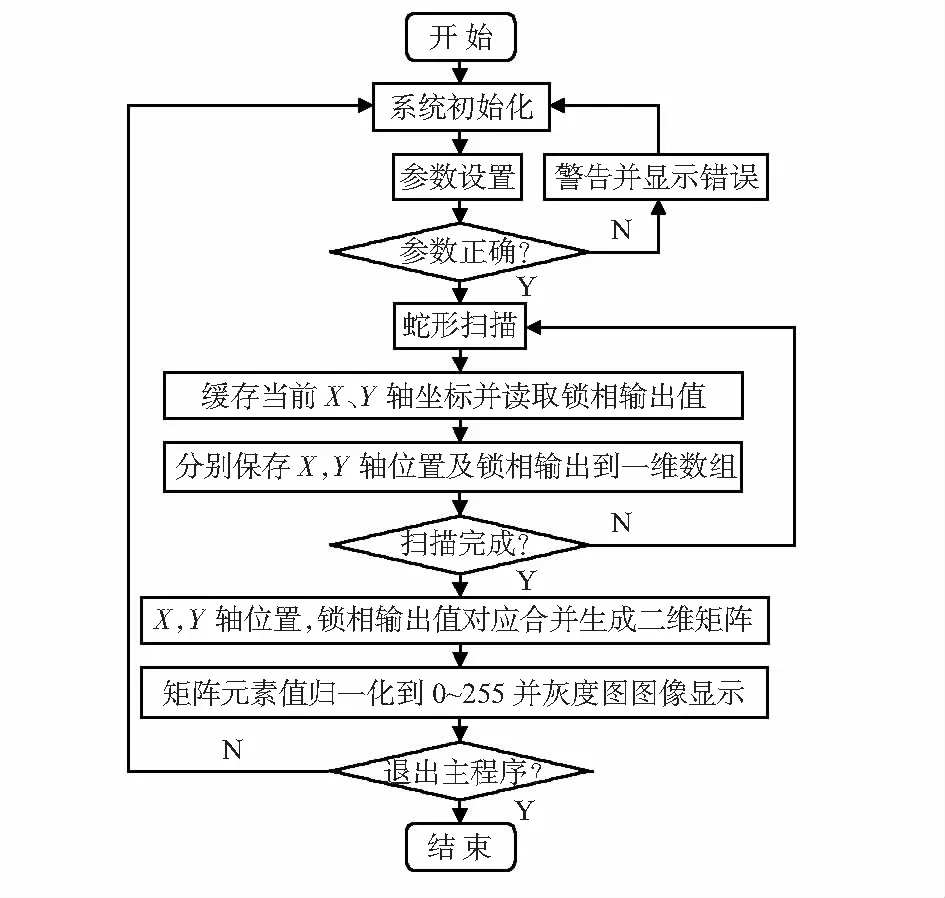
图2 软件流程图
软件可设置位移台的样品位置、移动速度,对样品进行扫描,通过锁相放大器数据信息采集,最终显示二维图像。
2.1 设备通信
该系统的设备通信功能模块中,均采用RS232协议串口通信方式,利用LabVIEW中的VISA控件,分别建立了PC与位移台控制器GSC—02和锁相放大器SR830的数据通信,实现串行端口发送和数据接收。
在通信连接成功后,软件的前面板上对位移台控制器和锁相放大器进行基本参数设置,位移控制器的基本参数包括初始和结束位置、步进距离、移动速度和当前位置读取等。
2.2 样品扫描
成像扫描时,将样品垂直放置于由X轴与Y轴构成的二维平移台上,同时保证样品的待成像面垂直于太赫兹波的传播方向。软件的成像扫描采用蛇形扫描的方式,如图3所示。由初始位置(左下角)逐步移动到结束位置(右上角),到达结束位置后X、Y轴联动回到起始位置。整个移动过程中,X轴向呈现往返式移动,Y轴向呈现单向式移动,没有锁相数据重复采集、平移台明显停顿现象。
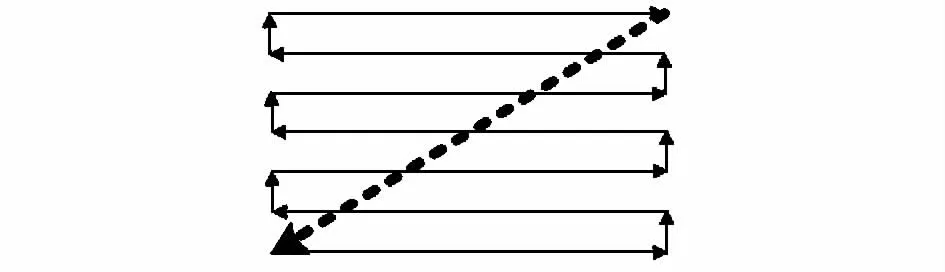
图3 光束扫描示意
2.3 二维图像构建
使用LabVIEW成像软件将数据获取和控制程序相结合,保证进行有效的数据采集、处理、存储并显示。二维图像重构主要包括原始数据整合和图像重构两个功能。
原始数据整合是指将平移台的X,Y轴坐标位置和此时对应的锁相输出值存放到一个二维数组中,X,Y轴的相对移动次数为该数组的列、行索引值,数组元素值为锁相输出值。图像重构是将原始二维数组进行线性归一化处理,再进行灰度化处理。线性归一化的计算公式为
(1)
式中x*为输出灰度值,x为原二维数组的元素值,xmax为原二维数组的最大值,xmin为原二维数组的最小值,归一化后的矩阵元素值在0~255之间。
按照式(1)进行线性归一化LabVIEW设计,存放有太赫兹幅值信息的二维数组,经过与极值控件提取出的最大值和最小值进行计算,得到了归一化处理后的二维灰度矩阵,即样品的太赫兹二维灰度图像。样品二维扫描到灰度图的映射过程如图4所示。

图4 样品扫描投影示意
2.4 数据存储
在数据存储方面,主要保存原始X轴、Y轴坐标位置及其对应的THz幅值,以及最后的可视化灰度图像。
图像显示与存储采用LabVIEW中的Vision视觉处理工具包,使用IMAQ控件,成像保存类型有BMP,JPEG,PNG,TIFF等方式,在设置图片存储路径后,用户可根据需求自由选取并保存。
3 实验与结果分析
为了测试太赫兹二维扫描成像系统的成像效果,分别采用420 GHz和140 GHz太赫兹源辐射源对网孔钢板进行二维成像测试。网孔钢板的成像面尺寸为80 mm×80 mm,小孔直径为2 mm,孔间距为5 mm。网孔钢板的固定装置与实物图如图5(a)所示,

图5 420 GHz和140 GHz时的网孔铁板成像
采用3倍频420 GHz太赫兹辐射源扫描成像时,二维扫描范围为10 mm×10 mm,扫描步长为0.2 mm,成像效果如图5(b)所示,网孔钢板的实验结果表明,当采用3倍频420 GHz的辐射源时,钢板小孔的轮廓边缘比较清晰,圆孔形状无明显变形,小孔区域灰度值分布规律,非小孔成像区域无干扰噪声出现,成像尺寸与实物尺寸高度吻合,成像效果非常好。同时网孔钢板的实验像素点个数为2 601个,扫描时间为14 min,计算机成像速度可达到3像素/s。采用140 GHz辐射源扫描成像时,扫描范围为15 mm×15 mm,扫描步长为0.2 mm,成像效果如图5(c)所示,小孔中心位置基本可以分辨出来,也可以观察到网孔的矩阵分布,但小孔边缘非常模糊,矩阵分布的小孔甚至出现了纵向区域联通,成像质量极差。
网孔钢板的实验结果表明,相对于140 GHz的成像质量而言,采用420 GHz的太赫兹图像能够清晰辨认样品的形状。即波长越短(长)时,成像分辨率越高(低),成像质量更好(差)。
为验证成像分辨率是否受到扫描步进距离、样品尺寸和外观形状等因素的影响,下面采用选择420 GHz辐射源分别对十字镂空金属薄板和金属板直角进行THz成像进行实验,图6(a)为十字镂空金属薄板实物图,镂空狭缝宽度为1 mm,横向、纵向狭缝长度分别为10 mm,6 mm;图6(b)为金属板直角实物图。

图6 十字镂空金属板和金属板直角实物及其成像
十字镂空金属薄板的二维扫描范围为12 mm×16 mm,扫描步长为0.5 mm,成像效果如图6(c)所示。金属板直角的二维扫描范围为40 mm×40 mm,扫描步长为2 mm,其成像效果如图6(d)所示。对比着两个样本的成像质量发现:在相同的太赫兹激励下,当扫描步进较小(大)时,边界轮廓比较清晰(模糊),噪声非常低(高)。
为了简便地估算上述三个样品的太赫兹成像误差,本文采用图像处理中的Otsu阈值法[10]对三幅灰度图进行阈值分割得到二值图,通过二值图中边界像素差来推算出成像误差。网孔钢板、十字镂空金属薄板和金属板直角的二值图分别如图7(a)、(b)和(c)所示。
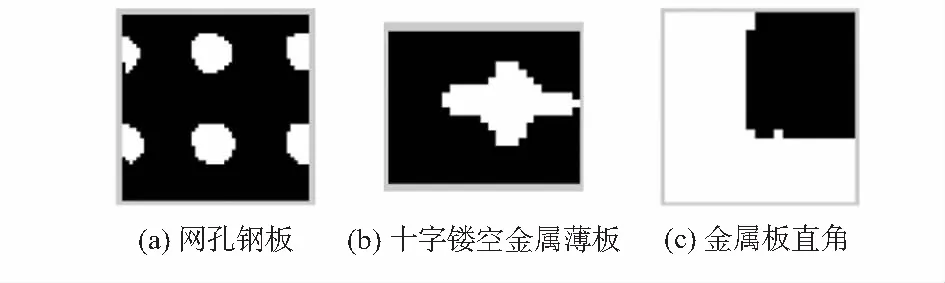
图7 三种样品的二值图
这里只选取图像中空白区域的横向和纵向两个方向的边界像素差来表征成像误差,边界像素差的计算公式为
(2)

按照式(2)的计算方法,分别对网孔钢板的中心圆直径(取顶部中间圆)、十字镂空金属薄板的横纵向狭缝长度和金属板直角边缘的长度进行计算,得到的边界像素差ΔDj和成像误差ΔLj如表1所示。

表1 三种样本图像的横纵向误差
通过上述表格可知,成像误差精度均为像素大小。根据极限衍射条件,最小空间分辨率为[6]
(3)
式中λ为光波长,f为聚焦透镜焦距,D为透镜尺寸。本文中,λ约为714 nm,f约为50 mm,D约为51.2 mm,计算出最小空间分辨率约为0.85 mm。而根据瑞利判据推出的极限分辨率Δ≥λ/2[11],计算出的极限分辨率为0.357 mm。
网孔钢板和十字镂空金属薄板的成像误差和极限分辨率相矛盾的原因,是因为扫描步进与波长不匹配,同时灰度图阈值法分割本身就存在一定的误差,最终造成边缘像素点发生偏移。而金属板直角的成像误差较大,是因为选取的位移步进较大,直接忽略了边缘细节信息。
4 结 论
基于LabVIEW设计的太赫兹二维扫描成像系统,采用蛇形扫描方式,成像速度达到了3像素/s。选用140 GHz和420 GHz的太赫兹辐射源对同一网孔钢板进行扫描成像,发现波长越低,其成像分辨率越高。通过改变扫描步进,发现成像分辨率也受到扫描步进的影响。
