柴油发电机变转动惯量飞轮的仿真
2019-06-11章义平张兴旺
章义平,张兴旺
(南昌工程学院机械与电气工程学院,江西 南昌 330099)
0 引言
作为主电网失效时的应急电源,柴油发电机是各种大型场所不可缺少的备用电源。尤其在船舶电站系统中,柴油发电机是唯一的发电设备。柴油发电机供电系统为孤立电网,负荷的冲击将引起柴油发电机转速的波动并影响电网供电质量,甚至导致柴油发电机飞车与停机。在脉冲性负载大幅波动而又需要保证机组供电质量时,可以通过改善机组的调速率来稳定机组的供电频率,也可以提高机组的抗负荷扰动的性能来稳定机组的供电频率。
文献[1]分析了转动惯量对离网模式下虚拟同步发电机输出特性的影响机理,并通过仿真验证了转动惯量对电网供电质量的影响。文献[2]针对呈冲击特性的现代武器装备给柴油发电机组的稳定运行造成严重影响的问题,分析了具有不同特点的脉冲性负载对柴油发电机稳定性的影响。文献[3]针对蜗轮增压柴油机在脉冲性负载下的转速稳定性问题,提出了改变蜗轮增压器转动惯量等的优化方案。文献[4]针对舰船的电力质量易受脉冲性负荷的影响问题,提出了采用柴油发电机组固有的机械储能平抑电力系统的功率波动,得出了利用柴油发电机组固有机械储能平抑负荷功率波动的量化标准。文献[5]设计了一种小型的转动惯量可变的飞轮,并将该飞轮安装于液压马达上,对飞轮的特性进行测试,测试得到的数据符合所建立的数学模型,并验证了飞轮的转动惯量随转速的变化而改变。文献[6]对飞轮储能系统(FESS)技术进行了综合评述,从理论上介绍了FESS结构。文献[7-8]针对飞轮储能系统(FESS)讨论了飞轮转子的总体设计方法,给出了确定几何参数的实用方法。文献[9]研究了采用变惯量飞轮的航天器姿态控制问题,对变惯量飞轮进行了动力学建模,并对飞轮的控制和操纵规律进行了优化设计,仿真结果证明变转动惯量飞轮相比传统飞轮在力矩输出能力和减小飞轮饱和可能性方面具有一定优越性。文献[10]对大容量高速立式电机加装的大转动惯量飞轮进行了设计与验证。结果证明,增大电机的转动惯量可以提高转速稳定性,但是损失了控制的灵活性。文献[11]分析了不同转动惯量叶轮对泵开机速度的影响问题,验证了泵开机后的转速稳定时间与叶轮转动惯量呈反比的结论。文献[12] 针对某种转盘式变惯量飞轮,建立了数学模型并对其进行仿真,提出了使用变刚度平衡弹簧替代定刚度弹簧的方法对飞轮进行改进。文献[13]公开了一种可变转动惯量轮轴,该可变转动惯量轮轴可以减小启动时的转动惯量,同时转速上升时转动惯量也会增加,具有稳定高转速的能力,但是该飞轮每次启动前都需要人工拔起插销。文献[14]公开了一种可变转动惯量的飞轮,该飞轮的转动惯量在启动与制动时是可变的,可以缩短启动与制动的时间,提高了设备效率,但是由于需要重力的作用,该飞轮只能垂直安装。
柴油发电机调速系统的响应速度和稳定性与其转动惯量紧密相关,如果发电机的转动惯量小,则发电机的灵活性好,启停时间短,响应速度快,但是易受负荷扰动影响。如果发电机的转动惯量大,则发电机的速度控制系统响应慢,但是具有较好的抗负荷扰动性能。如果在发电机飞轮旋转时对其转动惯量进行增大和减小的改变,将会改善柴油发电机的控制性能。
本文提出了一种结构简单的转动惯量可变的飞轮,并将其应用于柴油发电机,对变转动惯量飞轮与柴油发电机调速系统进行建模与仿真。
1 变转动惯量飞轮的设计
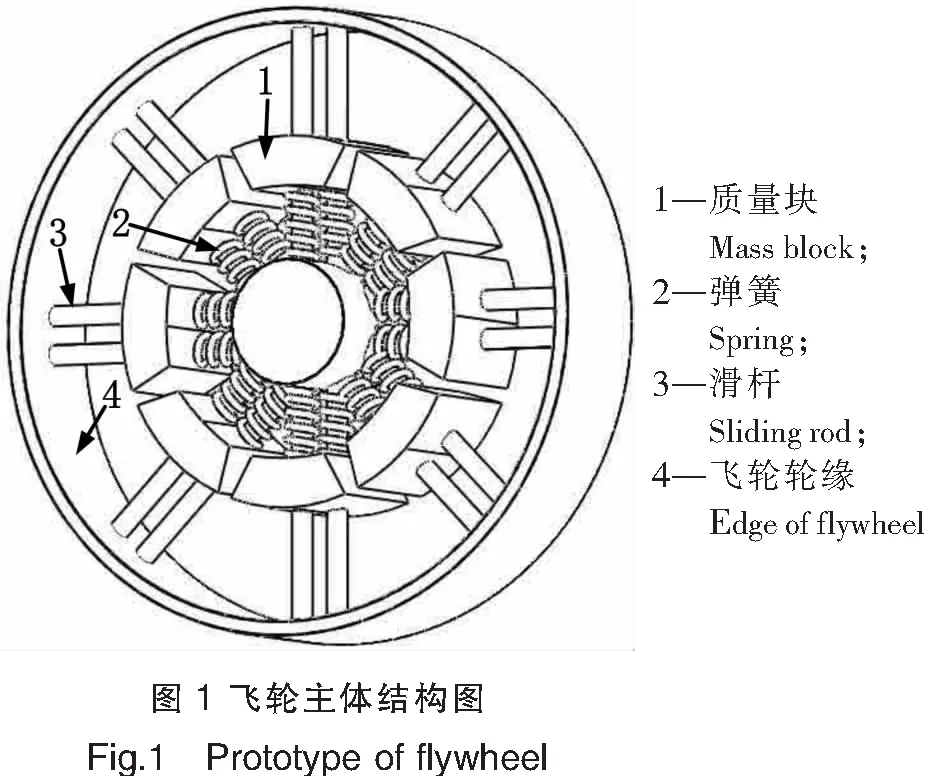
飞轮主体结构如图1所示。每个质量块质量为8 kg,由4根圆柱拉伸弹簧与飞轮中心连接,4根弹簧总刚度系数为408.47 N/mm,质量块可以在滑动杆上来回滑动;飞轮半径为870 mm;设计的额定转速为1500 r/min;飞轮框架的转动惯量为9 kg·m2。弹簧的刚度系数使用式(1)计算,具体参数可查阅文献[15]。
k′=Gd4/8D3n。
(1)
其中:G为材料切变模量;d为材料直径;D为弹簧中径;n为有效圈数。
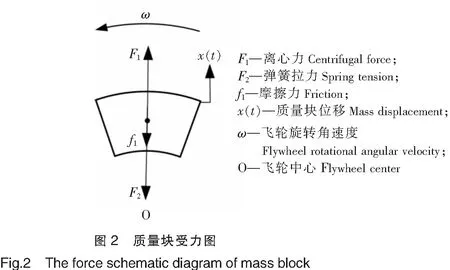
飞轮旋转时,质量块同时受到弹簧拉力和离心力的作用,如图2所示。当飞轮转速加快时离心力大于弹簧拉力,使得质量块朝轮缘滑动,当飞轮转速变慢时离心力小于弹簧拉力,使得质量块朝飞轮中心滑动。根据牛顿第二定律可得质量块运动方程:
(2)
其中:f1为摩檫力;m1为质量块的质量;ω为飞轮旋转角速度;r1为质量块位于飞轮中心极限位置时质量块质心与飞轮中心的距离;x为质量块的位移量;k为弹簧的刚度系数。
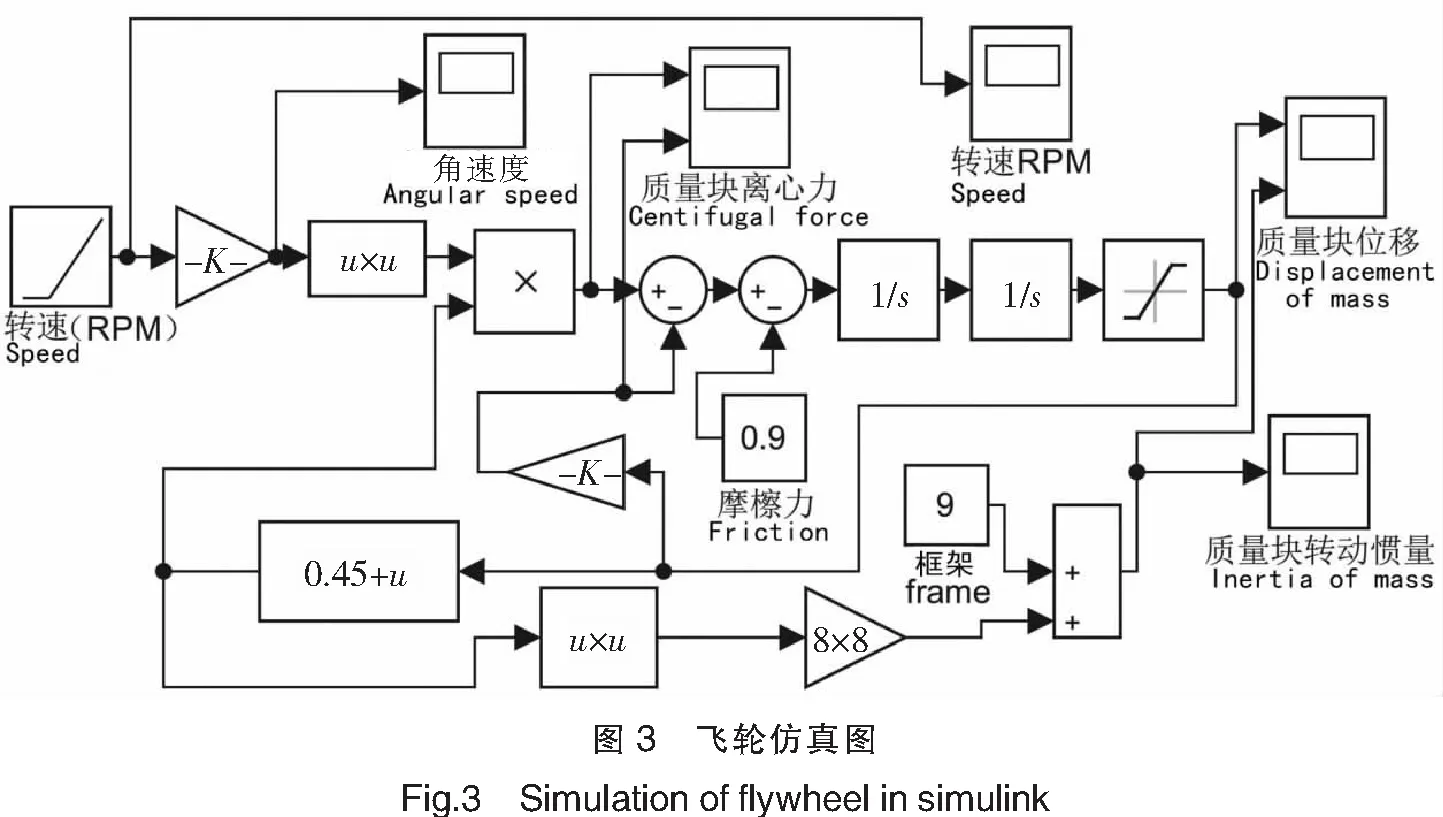
使用simulink搭建飞轮仿真电路,如图3所示。其中:K为增益模块的增益;u为模块的输入符号;1/s为积分模块。
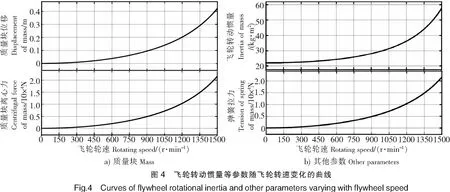
质量块的位移和飞轮转动惯量等参数随飞轮转速变化的响应曲线,如图4所示。
2 柴油发电机速度控制系统
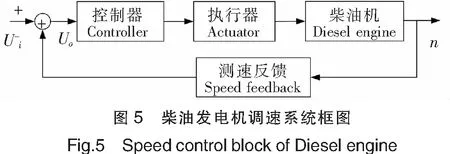
调速器将反馈的实际转速与设定转速进行比较,按照偏差对柴油机的油门进行操作。调速器的主要控制对象是柴油机的油门拉杆,通过对油门拉杆的调节,可以控制柴油机气缸进油量,从而实现对柴油机转速的控制。柴油发电机调速系统控制框图如图5所示。
根据达朗贝尔原理,可得柴油发电机运动方程:
Jdω/dt=Me-Mc。
(3)
其中:J为柴油发电机转动惯量;ωd柴油机转速;Me为发动机扭矩;Mc为负载阻力矩。
柴油发动机扭矩Me与油门调节齿杆的位置L和转速n有关,并且是非线性关系。在发动机转速变化较小的范围内,可以将Me近似线性化:
(4)
其中:Meo为发动机稳定状态时的发动机扭矩。
柴油发动机的阻力矩Mc是柴油机转速n和发电机负载Pe的函数。
(5)
其中:Mco为发动机稳定状态时的阻力矩,且Mco=Meo,Mco包含了发电机空载损耗,包括机械损耗和铁损。
将式(4)、式(5)代入式(3),可得到如下柴油发电机运动方程:
Jdn/dt+(60/2π)Δn(∂Mc/∂n-∂Me/∂n)=ΔL∂Me/∂L-ΔPe∂Mc/∂Pe。
(6)
由式(6)可分别得到ΔL和ΔPe单独作为输入的传递函数:
(7)
柴油机在调速系统的控制作用下,将燃烧的化学能转化为机械能,并产生使曲轴旋转的动能。发电机给电力负载供电,电力负载通过电磁转换,对柴油机曲轴施加阻尼力矩。为便于分析,令:
(8)

由式(7)和式(8)得到新的柴油发电机转速控制系统框图,如图6所示。图6所示的控制系统中,典型环节的时间常数与柴油发电机总转动惯量J有关,如果时间常数小,则典型环节响应速度快,而整个系统抗负荷扰动性能差;时间常数大,则系统响应慢,而抗负荷扰动性能好。若柴油发电机安装了转动惯量可变的飞轮,在启动时,由于系统典型环节的时间常数小,所以可以提高转速控制系统的响应速度,在额定转速运行时,由于系统典型环节的时间常数大,所以可以提高转速控制系统的抗扰动性能。
3 飞轮与柴油发电机联合仿真
仿真参数为:发电机功率为1250 kW,额定转速为1500 RPM,机组转动惯量为71.822 kg·m2。式(8)中的常数可以通过对柴油发电机台架试验数据进行曲线拟合得到[16-19],图7为飞轮与发电机联合仿真图,仿真结果见图8、图9和图10。


仿真方法如图6所示,仿真电路包含3个子系统,分别是安装了变惯量飞轮的柴油发电机、没有安装变惯量飞轮的柴油发电机和变惯量飞轮子系统。
图8为飞轮转动惯量J、质量块位移X和飞轮转速在柴油发电机起动过程中的变化曲线。在柴油发电机转速低于1000 r/min时飞轮转动惯量变化很慢,当柴油发电机转速超过1000 r/min后飞轮转动惯量以很快速度增长。图8中飞轮转动惯量J在0.5 s附近为水平直线,这是由于飞轮转动惯量已经增加至最大值。在1 s时飞轮转动惯量曲线有一段凹弧,这是因为柴油发电机转速在此时间段有很小的下降。
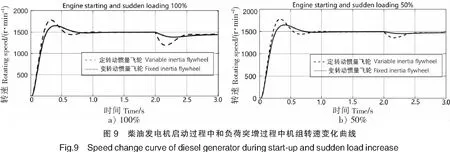
图9a和图9b分别为启动柴油发电机,并在第2秒突增100%和50%的额定负荷过程中的发电机转速变化曲线。虚线为未安装变转动惯量飞轮的柴油发电机转速曲线,实线为安装了变转动惯量飞轮的柴油发电机转速曲线。在0-1 s的时间段为柴油发电机启动阶段,在此时间段内安装了变转动惯量飞轮的柴油发电机转速超调量低于没有安装变转动惯量飞轮的柴油发电机。在第2秒系统突增100%或50%的发电机额定容量负荷后,没有安装变转动惯量飞轮的柴油发电机转速波动很大,而安装了变转动惯量飞轮的柴油发电机转速波动很小。
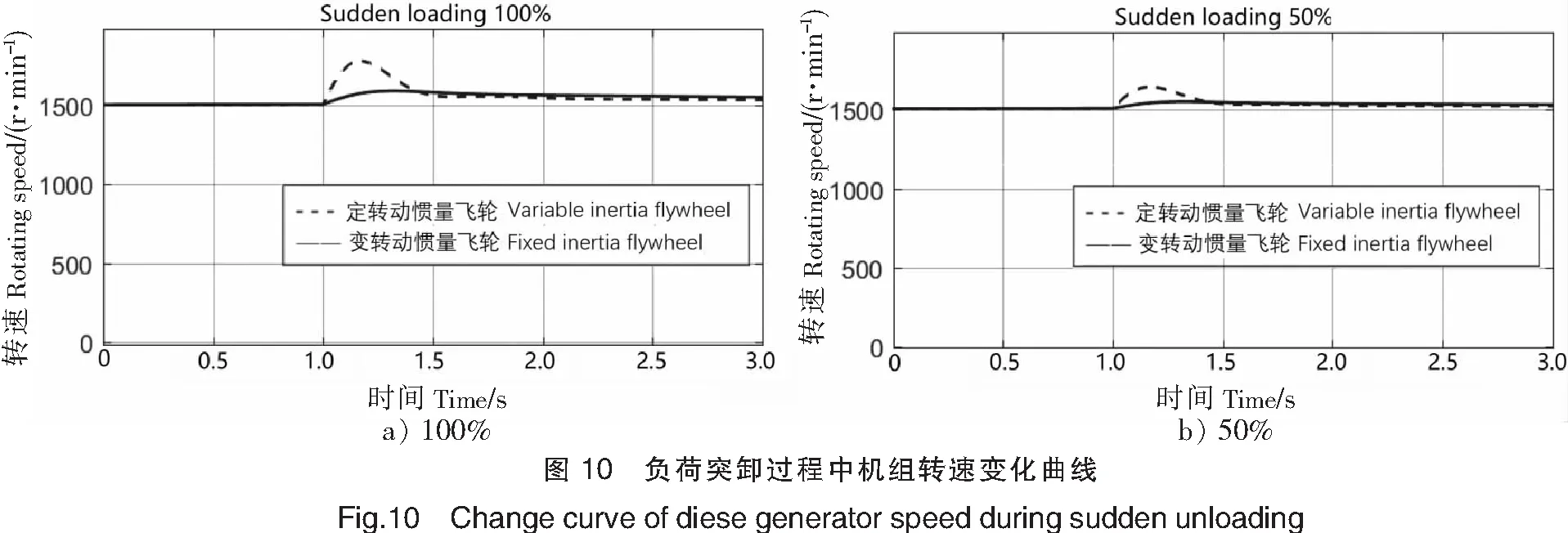
图10a和图10b分别为柴油发电机在第1秒时刻突减100%和50%的额定负荷后,发电机转速变化曲线。由图10可知,安装了变转动惯量飞轮的柴油发电机在负荷突然卸载时,发电机转速波动得到了抑制,而没有安装变转动惯量飞轮的柴油发电机的转速波动很大。
4 结论
1)变转动惯量飞轮,在柴油发电机启动时转动惯量最小,在柴油发电机转速较低时飞轮转动惯量变化很慢。当柴油发电机转速上升至额定转速附近时飞轮的转动惯量以很快的速度增长,变转动惯量飞轮的这种随发电机转速增大而呈非线性增长的特性,使得其可以有效地抑制柴油发电机启机时的超调量。
2)柴油发电机运行在额定转速时变转动惯量飞轮的转动惯量达到设计最大值,额定转速运行时转动惯量的增加使得柴油发电机具有很好的抗负载扰动性能。尤其当电力系统中存在大量脉冲性负载的情况下,变转动惯量飞轮可以有效地提高电网供电质量。
3)变转动惯量飞轮不仅可以应用于柴油发电机,还可以用于其他控制系统当中,相比飞轮储能系统(FESS),该变转动惯量飞轮结构简单,实用性强。针对不同的机电设备合理地设计变转动惯量飞轮,可以有效地减少系统的超调量,提高系统的抗扰动性能。
