基于遗传算法的永磁同步电机自抗扰控制
2019-06-11
(浙江工业大学 机械工程学院,浙江 杭州 310014)
永磁同步电机(Permanent magnet synchronous-motor, PMSM)具有结构简单、工作效率高等特点,在工业、交通、军事和航空等重要领域得到广泛应用[1]。但永磁同步电机存在强耦合、参数易变和非线性等特点[2],要考虑参数及负载变化对控制性能的影响。目前常用的控制策略如PID控制[3],它是以系统的偏差进行控制,控制简单,易于实现,但是PID是采用线性方法,对于非线性系统来说,在抗扰动方面难以实现高精度的控制[4-5]。
电机运行过程中的负载、参数变化等因素[6]限制了经典PID控制方法的应用范围。如果是固定扰动,可以通过前馈环节对扰动进行补偿,但在实际应用中,扰动往往是变化的,不可测量的,对系统造成不可估计的影响,所以要对系统内外扰动进行观测,以便系统根据得到的数据及时作出调整。自抗扰控制(ADRC)不依赖于被控对象准确的数学模型[7-9],系统内部及外部扰动由观测器观测出来并加以补偿,所以对系统参数变化和外部扰动不敏感;同时,ADRC控制器还设置了跟踪微分器和非线性状态误差反馈控制[10-14],实现无超调快速跟踪。笔者在矢量控制与PID控制[9]的基础上采用ADRC技术对永磁同步电机进行控制。该系统可实现位置、速度和扰动的观测,用ADRC控制器代替矢量控制中的位置和速度控制器,电流环采用PI控制器。
1 问题描述
PMSM在两相同步旋转d—q坐标系下,采用id=0矢量控制策略[10-14],电机运动方程为
(1)

ADRC的二阶控制对象为
(2)
式中:u为系统控制量;b为u的系数;f(x)为系统总扰动。
(3)
将PMSM数学模型转化为
(4)
2 PMSM的ADRC位置控制器设计
ADRC由3 部分组成:安排过渡过程、扩张状态观测器和非线性组合[7],结构框图如图1所示。

图1 二阶自抗扰控制器结构框图Fig.1 Structure block diagram of two order auto disturbance rejection controller
在对系统状态进行观测之前,需要设计一个微分器来实现过渡,使系统可以无超调跟踪,微分器采取近似微分的方法来实现。
跟踪微分器(TD)形式为
(5)
式中:h为采样周期;e0为位置跟踪误差;r为可调系数,r越大上升越快。fst函数为
(6)
其中
(7)

扩张状态观测器(ESO)[6]是整个自抗扰控制系统的关键部分,它能观测系统状态和扰动,实时反馈给系统进行补偿,其表达式为
(8)
其中
式中:z1,z2,z3分别为位置θ,速度ω还有总扰动f的估计值。
补偿后系统控制量为
(9)
为了克服系统扰动,提高系统鲁棒性,自抗扰控制器的非线性组合采用基于模型的PI鲁棒控制[15]。
由前面所述,永磁同步电机伺服系统描述为
(10)
位置跟踪误差为e1=θ-z1,速度跟踪误差为e2=ω-z2,定义误差函数为e=e2+5e1,定义x=e+z2,则有
(11)
控制率设计为

(12)


(13)
其中
下面进行稳定性分析,取Lyapunov函数为
(14)
对V进行求导,并将式(13)代入,可得
(15)

基于矢量控制[8]的PMSM自抗扰位置控制器系统框图如图2所示。
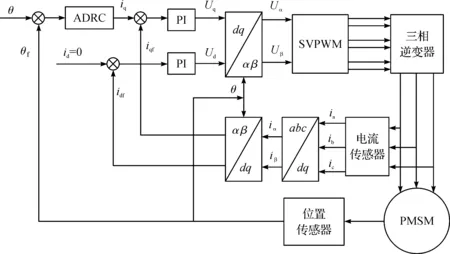
图2 ADRC位置控制器系统框图Fig.2 Block diagram of ADRC position controller system
3 基于遗传算法的ADRC参数优化
上述ADRC控制器待优化的参数有ESO的β1,β2,β3,考虑系统整体稳定性的要求,观测器的观测值应该尽可能接近系统的实际状态,所以,遗传算法的目的是使观测的位置和总体扰动误差尽可能低。将遗传算法适应度函数选择为位置误差及总和扰动误差的平方根值,设计适应度函数为
(16)
式中:N为种群个体数,这里N=50;w1,w2为权重,w1=0.7,w2=0.3。
1) 参数编码:将待优化的参数β1,β2,β3作为个体的3 个基因进行编码[16]。随机产生个体数为50的初始种群Ai(i=1,2,…,50),初始种群是参数假设解的集合,最优参数从这些初始种群出发,经过一系列遗传算法优化求出。种群的搜索范围为β1∈[0,200],β2∈[0,800],β3∈[0,1 800]。
2) 选择:选择的目的是将有用的遗传信息保留下来,提高收敛速度。个体选择采用最佳保留选择,即将轮盘赌方法选择的当前群体中使适应度函数小的群体[17],遗传到下一代群体中。
3) 交叉和变异:交叉即按照概率Pc选择2 个基因进行同位置的染色体互换;变异即按照概率pm对基因某些位进行取反[18-19],即0变1,1变0。交叉概率Pc和变异概率Pm的选择按照自适应调整的方法进行,这样可以避免固定的交叉变异概率值对环境的不适应,2 个值分别进行适应度调节,即
(17)
(18)
式中:fmax为适应度最大值;favg为每代适应度均值;f为两个交叉个体中适应度最大值;f*为变异个体的适应度值。
4) 全局最优收敛:当遗传代数达到设定值或者适应度值不再剧烈变化时,则算法结束,全局收敛,否则返回2)循环执行。最终得到优化后的参数值为β1=103.95,β2=398.57,β3=1 132.26。
遗传算法流程图及优化框图分别如图3,4所示。
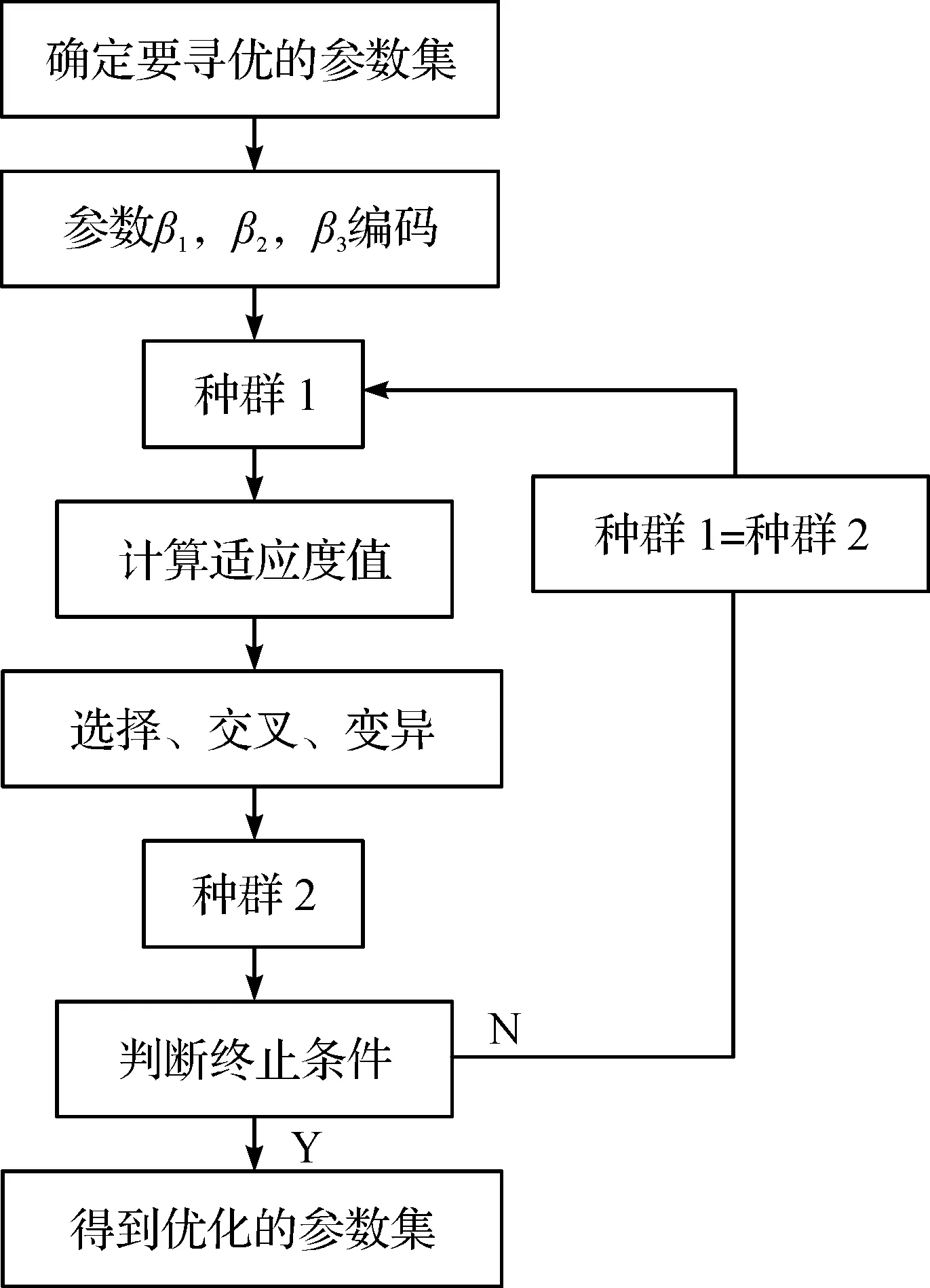
图3 遗传算法流程图Fig.3 Flowchart of genetic algorithm
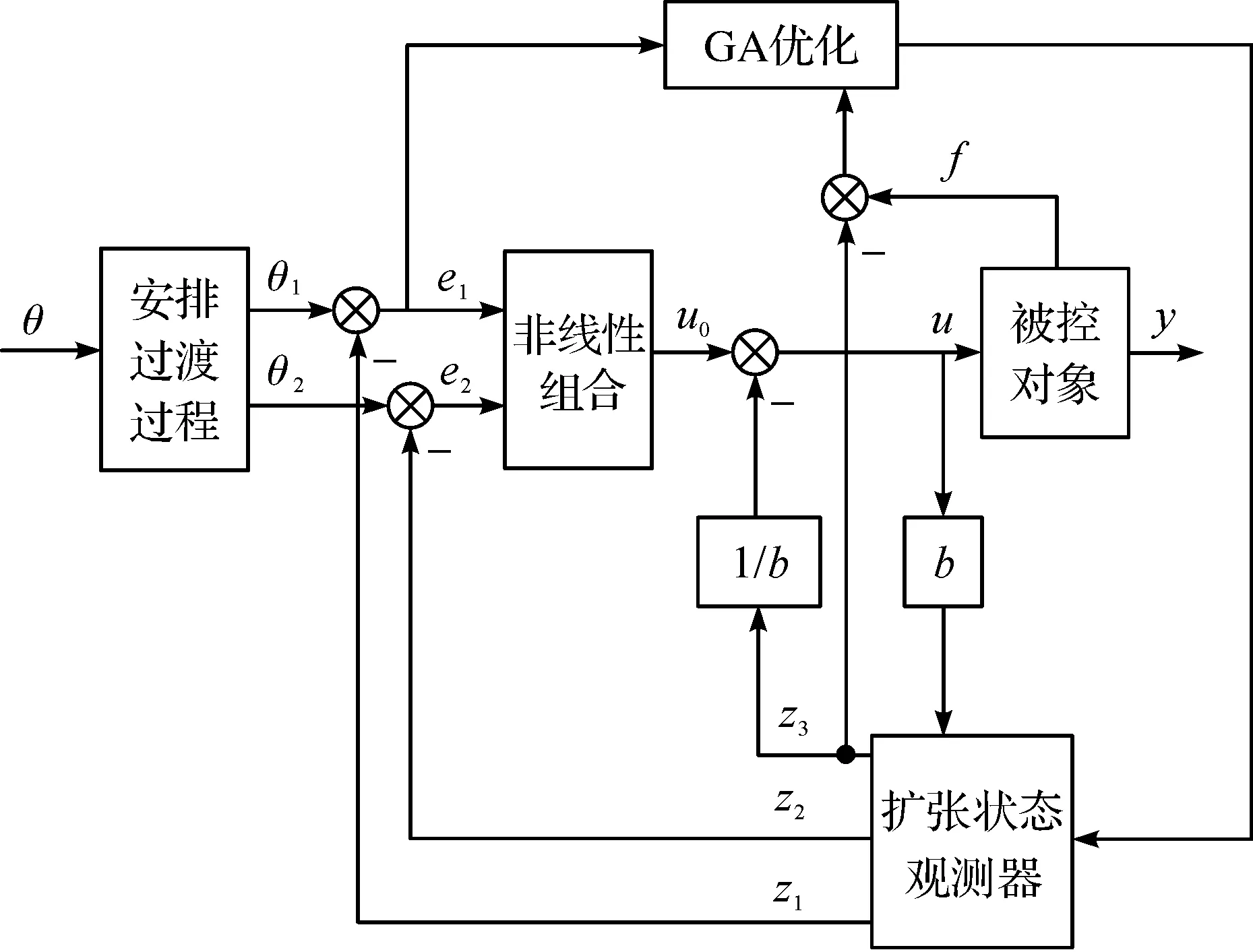
图4 遗传算法优化ADRC参数框图Fig.4 Block diagram of optimizing parameter of ADRC by genetic algorithm
4 仿真及实验分析
永磁同步电机的负载和参数随环境不同而改变,因此仿真中要研究加负载和参数变化时系统的定位精度。在Matlab/Simulink中搭建仿真模型,采用位置环自抗扰控制器,仿真步长h=0.001 s。仿真中所用的PMSM参数如表1所示。
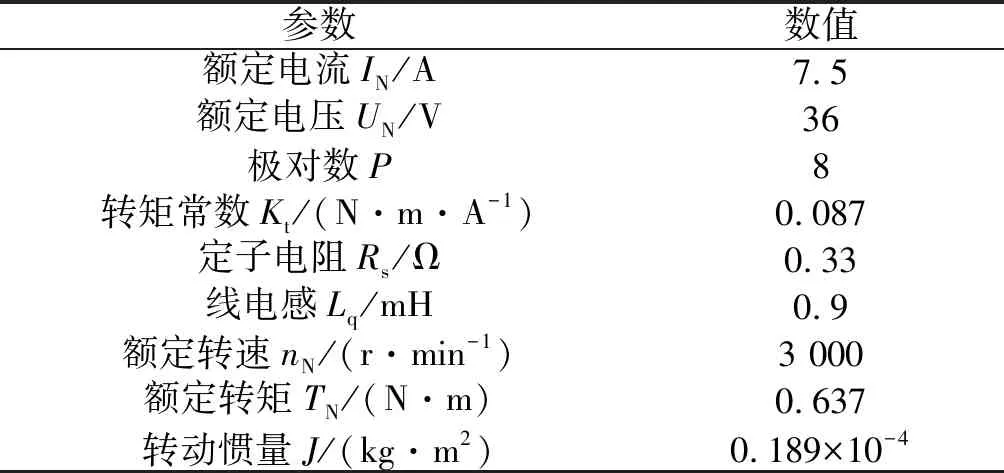
表1 电机参数表Table 1 Motor parameter
ADRC的部分参数采用遗传算法进行优化,为了验证优化后控制器的性能,仿真中其他条件相同,给定位置为5 °,10 °时,比较遗传算法优化后的ADRC控制器与经验整定参数的ADRC控制器的控制性能。对比图如图5所示。

图5 GA优化前后系统位置跟踪Fig.5 System location tracking before and after GA optimization
由图5可得:经过遗传算法优化后的系统跟踪速度明显高于未优化的系统,跟踪误差低于后者,位置为10°,5°时调节时间比经验整定参数的系统分别快0.04,0.03 s。下述关于ADRC位置控制器系统仿真均是优化后ADRC位置控制器。
系统参数转动惯量的变化可能会对控制稳定性造成影响,为了验证ADRC控制系统在参数变化环境下的跟踪精度,给定信号相同时,比较转动惯量为J,2J时系统的位置跟踪情况,如图6所示。
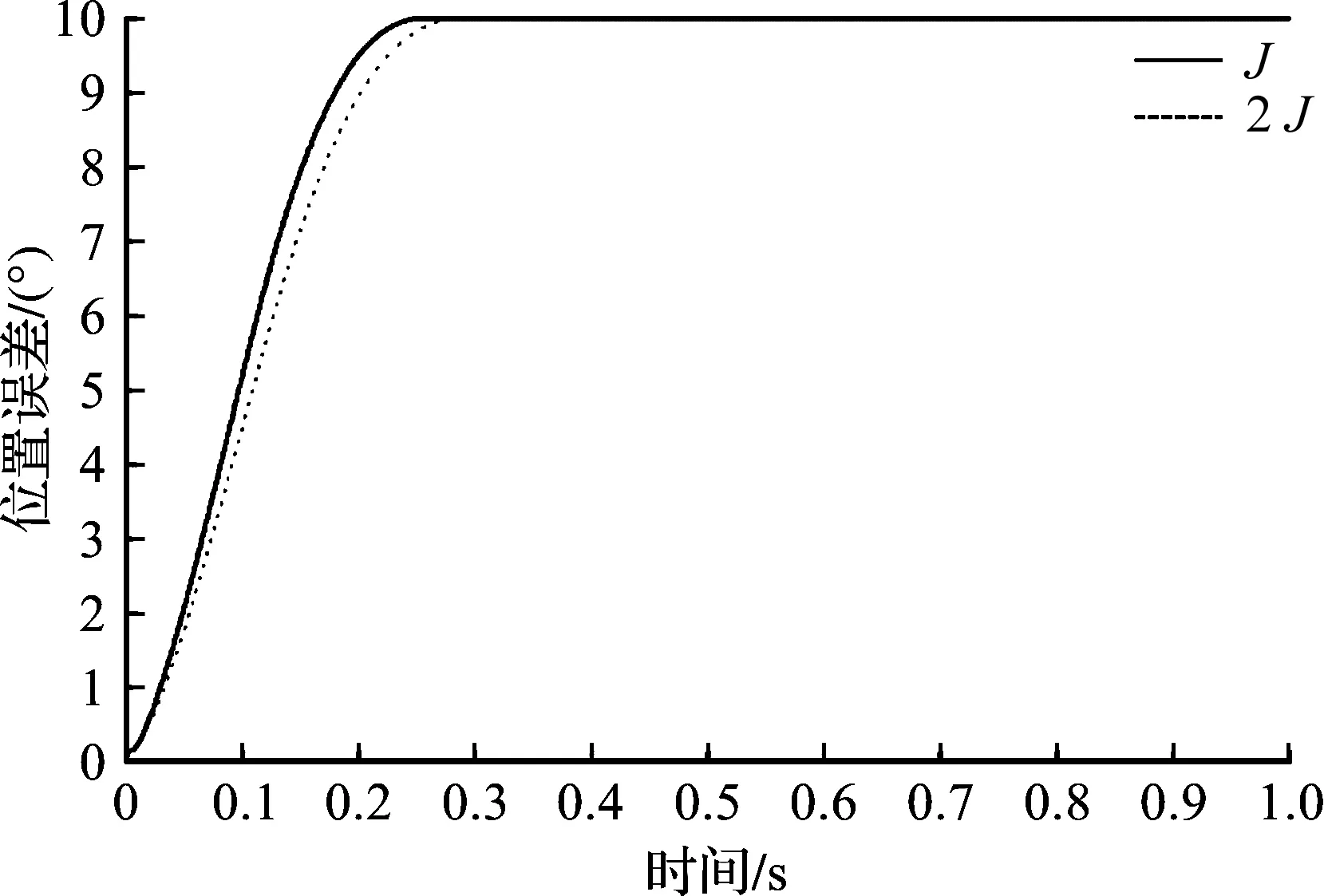
图6 转动惯量分别为J和2J系统位置跟踪Fig.6 Position tracking when the moment of inertia are J and 2J
从图6可得:当系统参数转动惯量变为2J时,调节时间仅下降0.014 s,系统的位置跟踪依然快速稳定,说明系统惯量变化不影响该控制器的性能。
为了验证优化后的ADRC系统在加载后的抗干扰性,其他条件完全相同的情况下,仿真对比了阶跃信号下PID和ADRC控制器在t=0.3 s加载0.2 N·m,t=0.5 s卸载,结果如图7所示。
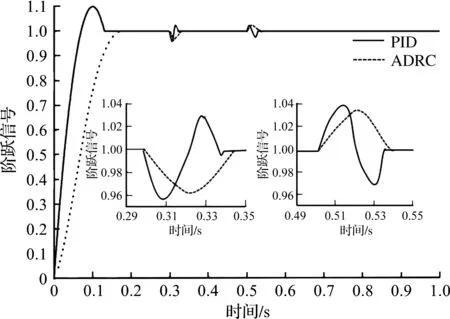
图7 PID与ADRC控制系统抗干扰性能对比Fig.7 Comparison of anti-jamming performance between PID and ADRC
由图7可得:PID控制与ADRC控制相比,到达稳定值的时间快了0.03 s,加载后的调节时间也稍快于ADRC控制,但是不论起动、加载还是卸载后的跟踪曲线都有很大的超调,不能满足跟踪精度要求高的系统。而ADRC控制系统不仅跟踪快速,且没有超调。
上述仿真验证的是输入信号为常值时控制系统跟随性,图8反映输入为正弦变化的信号时系统的连续跟随情况,在t=3 s时加入一个0.2 sint的扰动,观察ADRC和PID控制系统的性能,图9是实际扰动与观测扰动曲线。
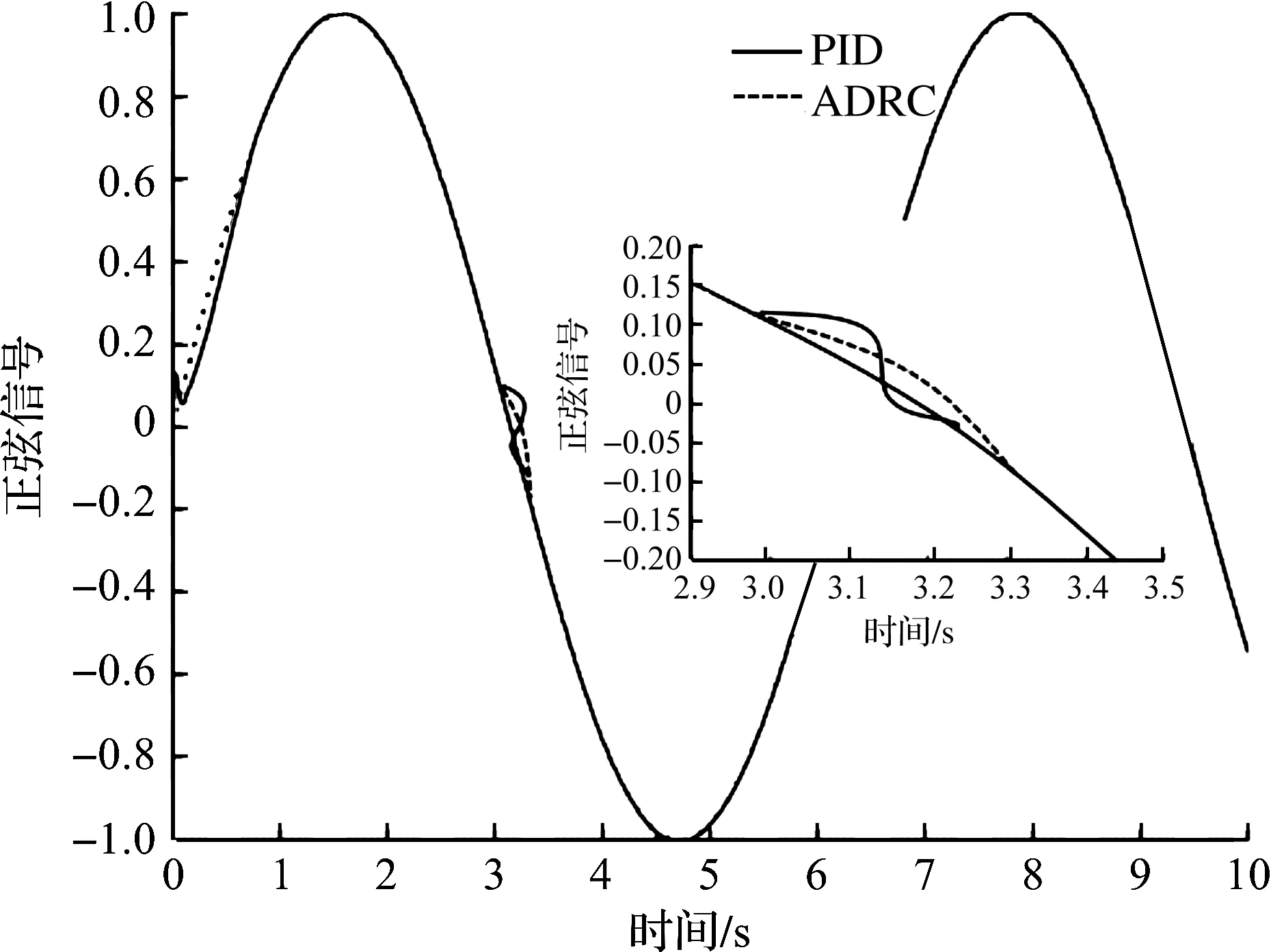
图8 正弦信号下PID与ADRC控制系统抗干扰性能对比Fig.8 Comparison of anti-interference performance between PID and ADRC control system under sinusoidal signal
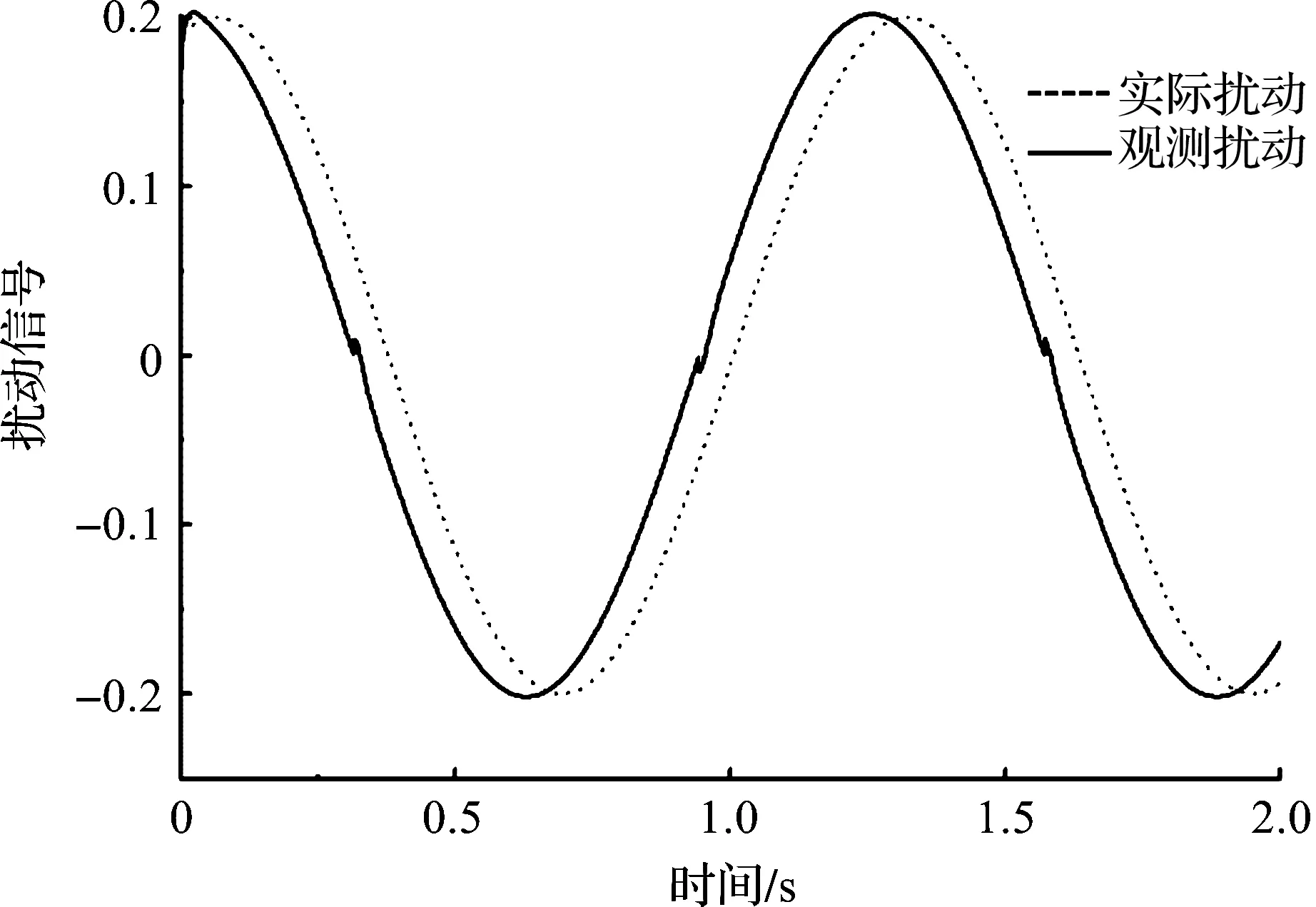
图9 实际扰动与观测扰动Fig.9 Actual disturbance and observation disturbance
从图8可得:正弦信号下,起动时PID控制的稳定性低于ADRC控制,加入干扰信号后,两者均能迅速恢复稳定跟踪,但ADRC的跟踪曲线比较平滑,抗干扰能力强,而PID控制的跟踪曲线波动较大。
伺服电机控制的目标是实现电机无超调和快速响应,为了更有力验证ADRC控制系统在负载扰动下的转速和位置响应性能,搭建测试平台结构如图10所示,PMSM参数与仿真所用电机参数一致,以意法半导体公司的微控制器STM32F407ZGT6作为系统的主芯片,三相逆变器产生六路PWM波形驱动电机转动,采用分辨率为2 048 ppr的增量式光电编码器实现转子位置检测,使用测功机加载需要的负载扰动,并测出实验所需的相关数据。系统采用id=0矢量控制,位置环和速度环采用ADRC控制器一体化控制,电流环采用PI控制器。
实验分别作了2 个验证:给定转子位置为60°,360°,在t=1.5 s施加0.2 N·m的负载,分别得出PID和ADRC控制系统位置响应曲线;给定转速为500,1 000 r/min,在t=1.5 s施加0.2 N·m的负载,得出PID和ADRC控制系统速度响应曲线。对于实验中的数据取关键点进行曲线分析,如图11,12所示。
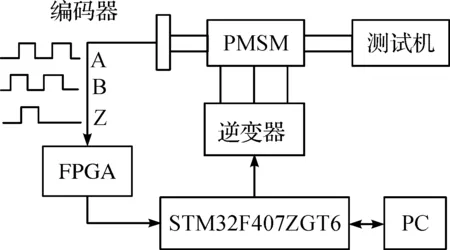
图10 测试平台结构图Fig.10 Structure diagram of Test platform
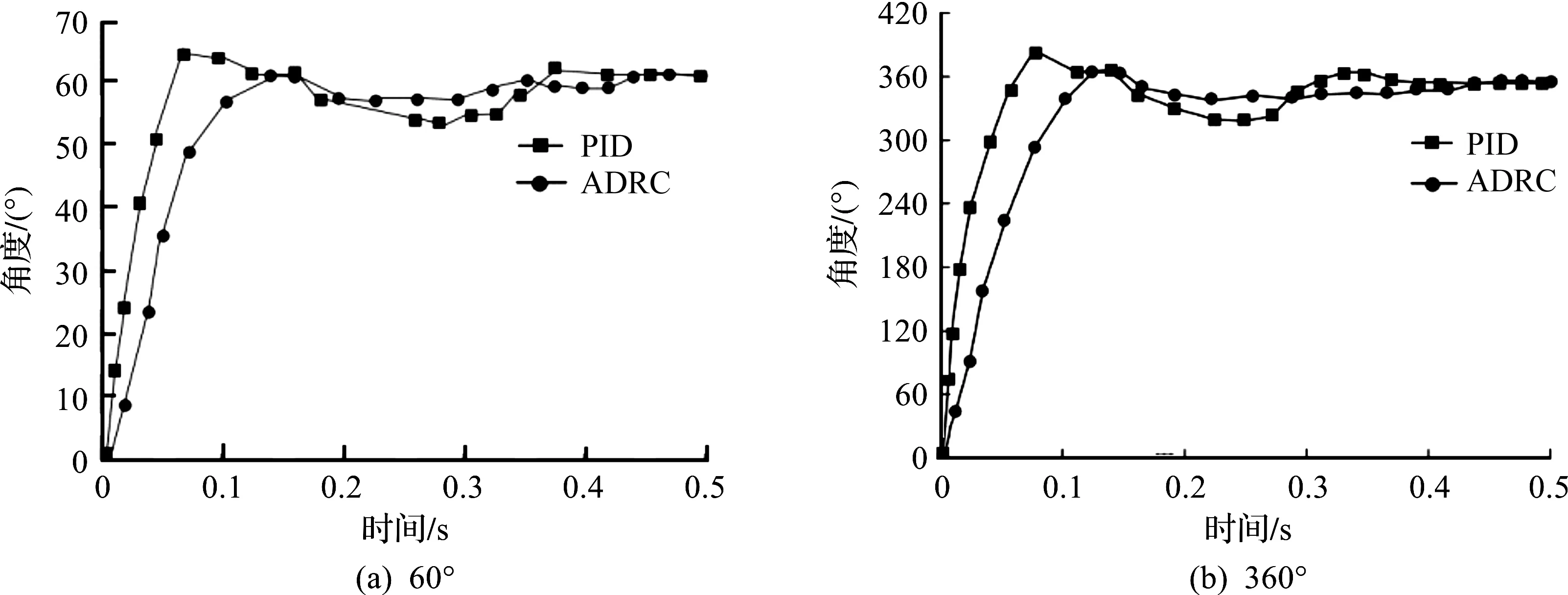
图11 位置响应曲线Fig.11 Response curve of position
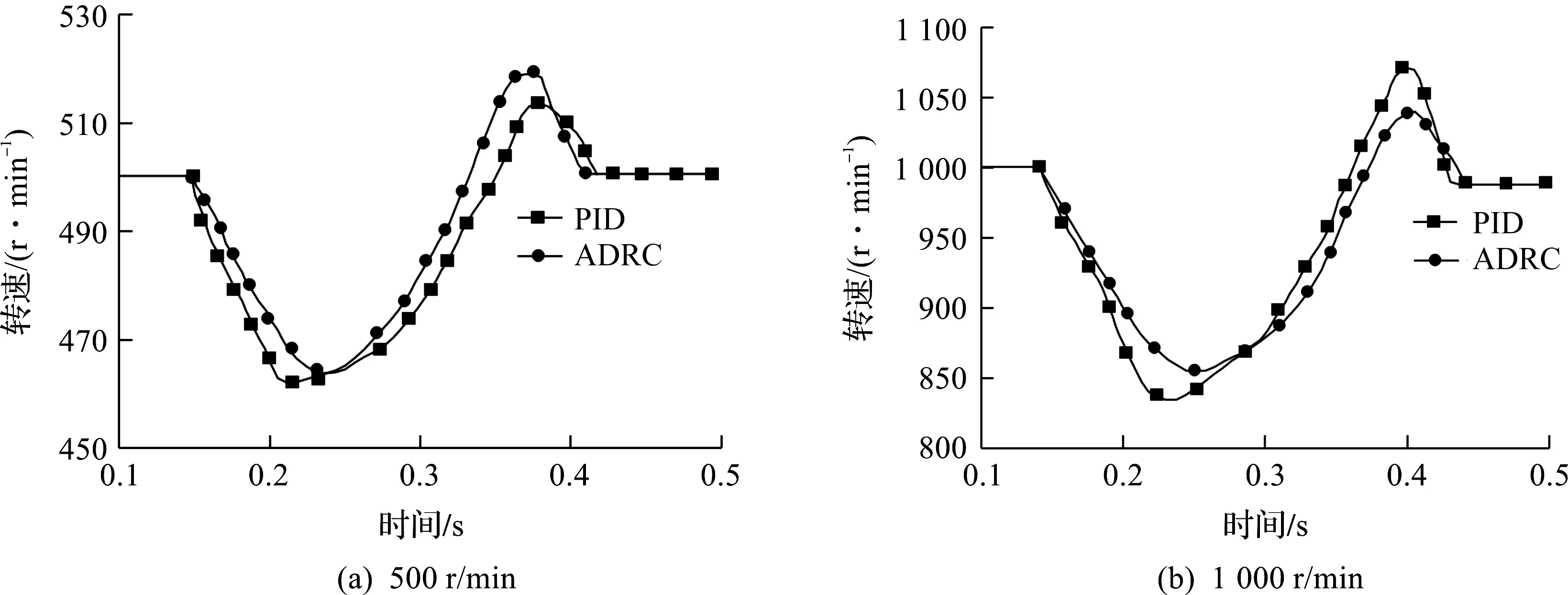
图12 速度响应曲线Fig.12 Response curve of speed
由图11可得:PID与ADRC均能实现快速响应,给定位置为60°时,PID控制和ADRC控制系统分别在0.419,0.426 s恢复稳定值;位置为360°时,PID和ADRC控制系统分别在0.423,0.431 s恢复稳定,但是PID控制存在很大的超调,曲线上下浮动大,ADRC控制系统比较稳定。
系统速度响应曲线如图12所示,在加入负载扰动后,PID与ADRC均能快速稳定,给定速度为500 r/min时,PID和ADRC控制系统分别在0.396,0.401 s恢复稳定;给定速度为1 000 r/min时分别在0.417,0.421 s到达给定值。而PID控制曲线波动比ADRC控制曲线波动大,证明ADRC控制系统控制精度更高,这和仿真结果是一致的。
5 结 论
在PMSM控制系统中,将矢量控制与自抗扰控制原理相结合,设计了永磁同步电机ADRC位置控制器,并用遗传算法解决了自抗扰控制器部分参数靠经验整定的不足。通过仿真对变参数和加负载扰动情况下的系统稳定性进行分析,仿真表明:优化后的ADRC控制系统动静态性能良好,抗干扰能力强、鲁棒性高,可实现无超调快速响应,控制精度高,实验分析结果进一步说明ADRC抗负载扰动能力强,稳定性高。
