双向混合试验方法及验证
2019-05-27朱思宇许国山徐小童
王 贞,朱思宇,许国山,徐小童,吴 斌
(1.哈尔滨工业大学 结构工程灾变与控制教育部重点实验室,哈尔滨 150090;2.哈尔滨工业大学 土木工程智能防灾减灾工业和信息化部重点实验室,哈尔滨 150090;3.哈尔滨工业大学 土木工程学院,哈尔滨 150090)
在人类历史上,地震一直是人类社会的大敌。合理的结构抗震设计是减小地震灾害的有效措施。但由于抗震机理和结构的复杂性,仅靠理论难以完全把握结构的地震响应,常通过结构试验研究其抗震性能[1]。混合试验能直接给出结构在指定地震作用下的响应,是一种重要的结构抗震试验方法。有关研究及试验结果表明,地震对结构的作用是多向的,水平双向地震对结构的破坏作用比单向地震大很多[2]。因此精确地完成双向混合试验对抗震研究具有重要意义。
与单向混合试验不同,双向混合试验的双向位移加载中的位移耦合关系,为作动器的控制命令求解带来困难。混合试验需要不断获取试件的当前位置与恢复力,保证积分算法逐步推进。而由于位移的耦联,试件实际位移的测量以及试件恢复力的获得也存在困难[3]。随着试件规模及刚度的提高,双向混合试验的加载难度加大,常常需要采用比自由度数目更多的作动器完成加载[4]。对冗余作动器的加载控制又成为新的难点。
在双向混合试验方面,前人已经完成了一些研究工作。Thewalt等[5]采用线性转换关系,完成了双向混合试验。Molina等开展了三层足尺模型的双向拟动力试验,将非线性坐标变换关系引入到试验中。Liu等[6]开展了单层钢框架双向混合试验。Wu等[7]开展了二层足尺防屈曲支撑混凝土框架试验。程春等[8-9]也开展了相关研究。此外,双向慢速加载方法在拟静力试验得到了一定程度的研究和应用,如曾聪等[10]研究了如何在拟静力试验中准确实现压剪的力-位移混合控制问题,Xia等[11]采用双向拟静力试验研究双壁钢箱混凝土组合墩柱的抗震性能。此前混合试验软件HyTest[12-13]已经具备一些多自由度加载控制功能[14]。但这些研究与应用往往没有考虑几何非线性问题。
本文主要研究双向混合试验的加载控制方法。阐述了坐标转换方法及试件恢复力的求解方法,提出基于数值迭代算法的外环加载方法以及力控制的冗余作动器加载方法,并开展了数值模拟及真实试验。
1 双向混合试验控制方法[15]
混合试验是一种将计算机模拟与结构试验有机结合的试验方法。该方法通过作动器对结构试件进行加载,并实际测量恢复力,从而通过积分算法求解得到下一步加载位移。
与常规混合试验相比,双向混合试验的难点在于如何确定作动器命令,如何求解质心恢复力,如何进行作动器加载控制。本文将详细阐述这些问题。
1.1 坐标转换
双向混合试验中,由于两向作动器位移的耦合与质心的转动,作动器位移、试件位移与传感器测量值之间存在几何关系。试验的顺利实施,依赖于坐标变换的正确性。
假设长方形的单层楼板试件为刚体试件。为方便、准确地对试件进行描述,建立固定于地面的整体坐标系XOY,以及楼板质心作为原点的局部坐标系xcy,两坐标系的坐标轴平行且方向一致。试件位移可表示为平面内X方向平动dx、Y方向平动dy以及试件中心的转动dθ,如图1所示。图中A1、A2、A3、A4分别表示作动器,L1、L2、L3、L4分别表示位移计,rx、ry、rθ分别表示质心的广义恢复力。

(1)


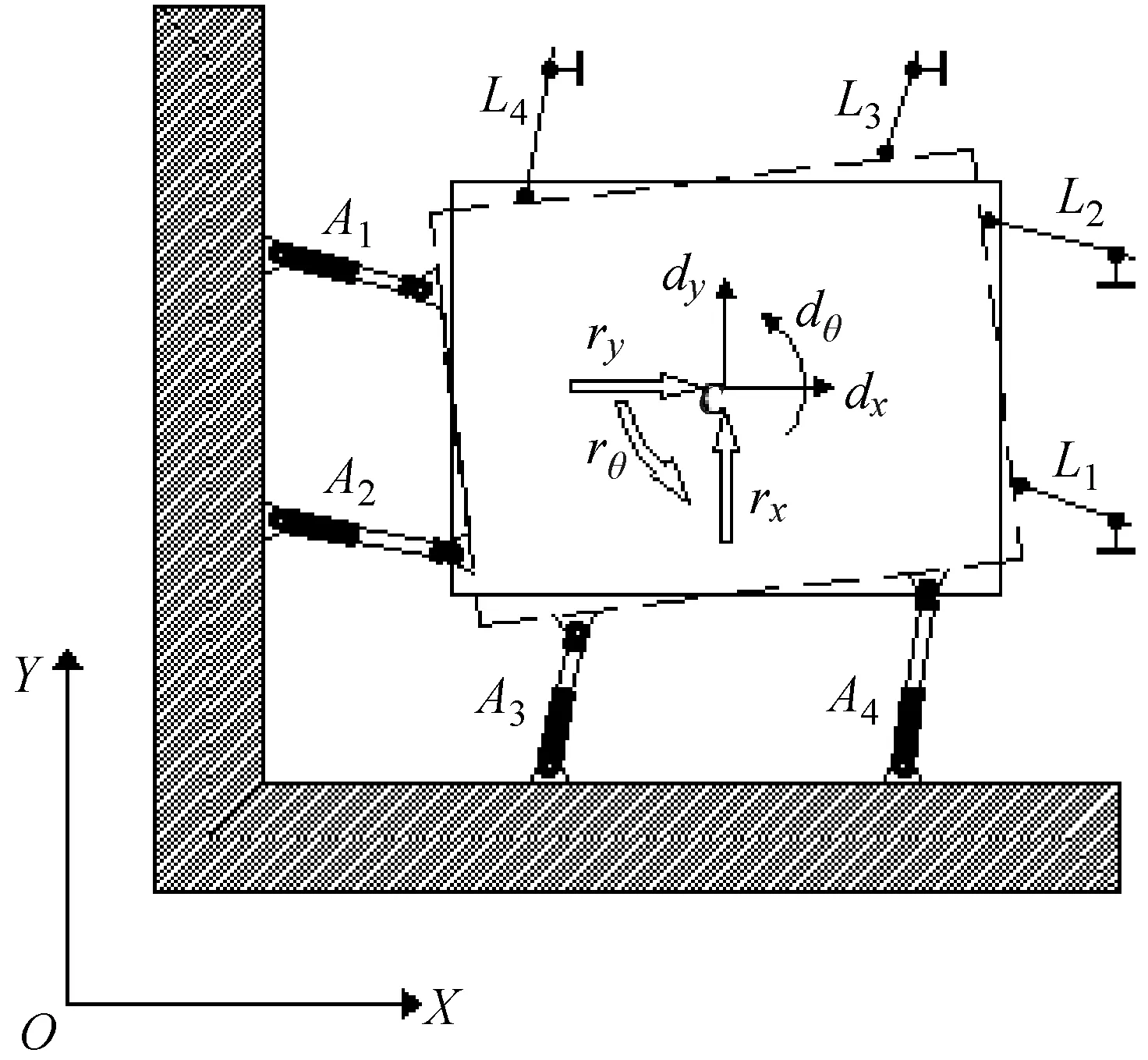
图1 试件及作动器、位移计布置Fig.1 Specimen and set-up of actuators and LVDTs
(2)
在局部坐标系中,作动器与试件连接点的初始坐标为
(3)
(4)
将局部坐标系中的坐标转换到整体坐标系中,得到作动器与试件连接点移动后在整体坐标系中的坐标为
(5)
整理得
(6)
其中

(7)
为了后文讨论方便,把该式表示成函数的形式,即
(8)
该式表示,当试件质心位移为dM时,第i号作动器的读数理论上为gi(dM)。由于间隙、支座滑移、连接件弹性变形等的影响,实际值可能和该值略有差别。
外接位移计的读数与此类似,不再赘述。
1.2 试件恢复力的求解

双向混合试验中,加载所用作动器两端为球铰,出力总是沿其轴向,通过作动器力传感器可以得到每个作动器出力值。根据作动器所在位置,可知作动器当前的出力方向。下面以第i号作动器为例,根据单位向量的定义,将作动器位置向量除以向量的模,即可得到作动器力方向的单位向量,即
(9)
在整体坐标系内,将第i号作动器出力fi沿坐标系的X轴与Y轴进行分解,得到各分量
(10)
由于作动器的出力作用在试件的不同位置,各个分力对试件中心可能产生力矩,与发生转动的试件的恢复力矩相平衡。将作动器与试件连接点到试件中心的距离用向量表示
(11)
则可求得第i号作动器出力对试件中心产生的力矩
(12)
将所有作动器的分力加和,可得到试件受到的X与Y方向的力及力矩,根据受力平衡,可得试件的恢复力,为
r=A·F
(13)
其中,F表示n个作动器的出力值组成的向量
A表示3×n的矩阵,即
1.3 质心位移求解
混合试验中,由于试件滑移、连接件变形等加载误差的存在,作动器的位移并不等于作动器与试件连接点的位移,仅使用作动器的内部位移计测量试件位移是不准确的。为了提高试验的精度,采用外接LVDT位移计的读数反解试件质心位移并以此为控制变量,实现双向混合试验的外环控制。

(14)

Mi=T·(Mi,0-C0)+Cc
(15)

(16)
式中,p表示位移计的数目。试验过程中,位移传感器的测量值已知,求解试件质心位移就是求解由式(14)、(16)组成的方程组。鉴于式(16)是关于质心位移的超越方程,此方程组的解难以直接得到,常需采用牛顿法等迭代求解。当采用超过三个位移计时,在牛顿法求解过程中雅可比矩阵非方阵,此时需使用伪逆矩阵代替逆矩阵求解,可得最小二乘意义下的最优解。
1.4 外环控制方法
双向混合试验中作动器的位移是互相关联的,通过反馈控制合理地调整作动器命令,可使试件快速准确地达到期望位移。本文提出基于牛顿迭代的作动器位移命令更新方法。
混合试验的加载控制目标,就是使试件质心位移以合理的方式接近期望位移,即
d-dM=0
(17)
对于每一积分步,期望位移是确定的,而质心位移会由于作动器的不断加载而变动。而作动器的运动又受到其命令的制约,因此可以把质心位移视作作动器命令的函数,即
dM=dM(dC)
(18)
不断更新作动器的命令进行加载,就是求解由式(17)和式(18)组成的非线性方程组的过程。采用牛顿迭代法可以表示为
(19)

(20)
而
(21)
即对第n个作动器而言,其命令对质心各运动分量的偏导数。若假定每次采集数据计算新命令时,作动器响应都能很好跟踪其命令,即
dC≈dA
(22)
因此有
(23)

尽管以上推导是合理的,但忽略了作动器跟踪误差,即理论上dC不一定等于dA,甚至在采样频率比较高时,它们之间存在明显的差别。为了考虑该误差的影响,对得到的雅克比矩阵进行折减,即实际使用的迭代格式为
(24)
式中,α是0~1之间的折减系数。该式表明对所有作动器采用相同的折减系数,实际中与各作动器相关的误差可能很不同,可以为不同作动器设置不同参数,以实现更好性能。
由式(24)可见,每次作动器命令更新的时候,根据当前时刻质心位移与期望位移在各个分量上的差,以及当前时刻的雅克比矩阵,求解新的命令。因此充分考虑了作动器命令对质心位移的影响。同时考虑到试验中误差的不确定性,引入了折减系数,使得命令更为光滑、作动器响应更为协调。实际实施中,还需要引入迭代跳出条件,此处不再赘述。
2 冗余作动器的控制
2.1 作动器加载的最优出力
在双向混合试验中,当试件尺寸较大或刚度较大时,由于作动器出力的限制,仅使用三个作动器进行加载控制难以实现加载目标。采用超过三个作动器时,由于楼板平面内仅有三个自由度且不同作动器加载速度的差距、加载误差的影响,作动器可能互相干扰,不能以合理的出力实现加载。举个极端的例子,可能某作动器对加载起阻碍作用,即其余作动器需抵消该作动器出力。之所以会出现这种情况,是因为试件的质心位移需要且仅需要三个位移控制作动器就能实现,多余作动器的存在不能改变质心位移;多余作动器只会影响与当前质心位移对应的试件恢复力如何在各作动器之间分配。很显然,存在无数种可能,只能按照一定的原则实现一种较合理的分配方式,当然也包含前面所举极端例子。总之,需要对冗余作动器的加载控制进行处理,从而优化各作动器的出力分配,与第1.4节的外环控制共同完成对试件的加载控制。
Molina等对冗余作动器采用位移控制,并根据性能指标计算优化出力,从而对位移控制进行修正。与此类似又有所不同,本文提出对冗余作动器直接采取力控制,并采用更为简洁的优化目标表达式,从而不需要求解非线性方程即可得到优化力。
为使作动器能协调工作,所采用的优化目标的内涵是,期望每一个作动器的出力值都能远离其出力上限,并且总的出力的绝对值的和最小,最大限度地发挥作动器加载能力。优化目标如下
(25)

对于此条件极值问题,一种解决办法是把约束条件代入到优化函数,另外一种是采用拉格朗日乘子法,本文采用第二种方法。首先定义拉格朗日函数,即
L(x)=h(F)+λ×Q(F)T
(26)
其中
Q(F)=r-A·F
拉格朗日函数对各变量的偏导数为0,即得优化问题的解,为
(27)
为了便于理解,给出展开后的拉格朗日函数为
(28)
其中alk为矩阵A的第l行k列元素。那么式(27)为
(29)
显然可以表示为
(30)
其中
可见,该优化问题转化为线性方程组求解问题,非常方便求解。
必须注意的是,本节讨论的是已知当前控制步试件恢复力r后,根据优化目标求解各作动器应该实现的最优出力,它们不一定是实际的出力。在实际实施中,把与冗余作动器对应的最优出力以力命令的形式发给作动器,让作动器在下一步实现。尽管有一步延迟,但考虑到控制步步长较小,应该具有较好的精度,数值模拟也验证了该推断。
2.2 冗余作动器的力控制方法
第2.1节所述的最优出力,是试件在当前位移状态下,满足优化目标的作动器的最优出力。冗余作动器采用力控制模式,可直接发送计算得到的最优出力,通过试件自身受力平衡,使位移控制作动器的出力达到或接近最优出力。
简述试件采用上述方法加载时的试验过程如下,其框图见图2。
(1)读取外接LVDT、作动器位移、作动器力等读数;
(2)求解试件质心位移及试件恢复力;

(4)求解试件当前位移下的矩阵J-1;
(5)根据式(19)计算新的位移控制作动器命令;
(6)根据式(30)计算试件最优出力;
(7)把位移命令、力命令发送给作动器进行加载;
(8)等待加载步时长后,回到第(1)步,直至循环终止。
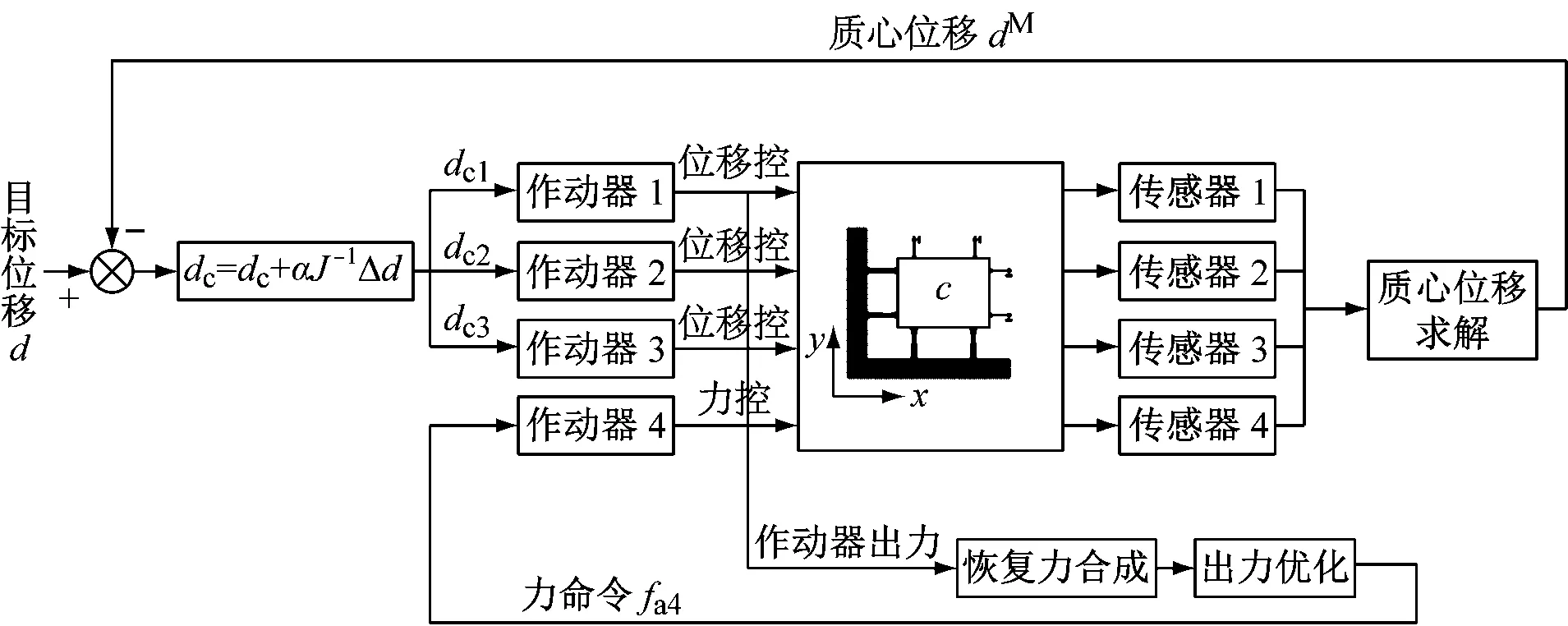
图2 双向混合试验的加载控制策略Fig.2 Loading control strategy for bi-directionnal hybrid test
3 数值模拟
为检验上述双向混合试验控制策略的合理性与准确性,采用Simulink进行仿真模拟。采用文献[16]的电液伺服作动器模型,纯数值模拟得到的结构地震响应作为期望位移。试件x、y方向刚度均为100 kN/mm,转动刚度100 kN·m/rad。试件对目标位移的跟踪情况见图3、4。
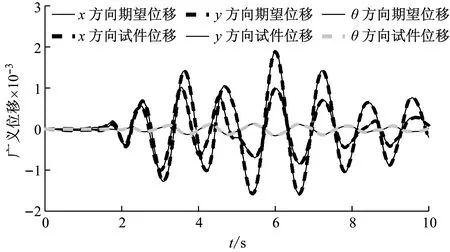
图3 期望位移与试件位移比较Fig.3 Comparison between specimen displacement and desired displacement
由图3可见,三个方向位移均能达到很好的跟踪效果。冗余作动器优化控制对作动器出力的影响见图4。4个作动器实际出力在经过冗余控制的优化后,与最优出力基本一致,冗余作动器的控制方法能达到较理想效果。二者存在差别,是因为当前步发送的是上一步的优化力。

图4 作动器实际出力与最优出力Fig.4 Actual forces and optimal forces of actuators
4 试验验证
结构为单层钢框架,尺寸为2.0 m×2.0 m×1.5 m,楼板假定为刚体。正式试验前估计得到的试件三个方向刚度为(采用国际单位)
设定原型结构的质量矩阵、阻尼矩阵为(采用国际单位)
采用四个作动器进行加载,x、y方向各两个作动器。试件锚固在6 t重的地梁上,地梁通过8根锚杆固定于地面。外接4个LVDT位移传感器用于外环控制,各传感器两端铰接。每积分步迭代加载上限10次,每次加载时长500 ms。试件与加载设备见图5。
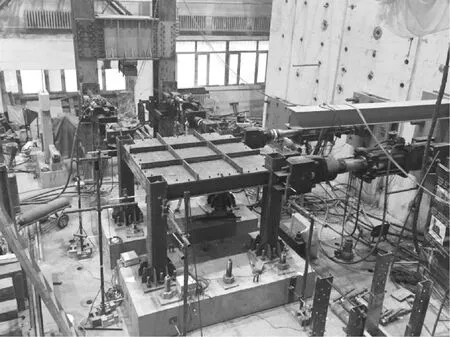
图5 试件及加载设备Fig.5 Specimen and loading devices
混合试验涉及伺服控制、计算机模拟与数值分析等技术,需要借助混合试验平台。前述双向混合试验控制方法采用C++代码实现,整合到HyTest软件的试验子结构中。HyTest的协调器完成运动方程求解,试验子结构软件负责加载控制并与MTS系统通信,从而操作作动器对试件进行加载。
对结构施加20 gal的El Centro(1940,NS)地震记录;采用中心差分法求解运动方程,积分步长0.01 s。试件实际位移对目标位移的跟踪效果如图6所示。可以看出,三个自由度方向的位移跟踪效果均良好,平动位移最大误差约为0.01 mm,表明每积分步试件均能在加载时间内达到期望位移。
为了作对比,还以四个作动器均采用位移控制模式重复了该试验,两次试验的目标函数值如图7所示。由图可见,本文所述方法的目标函数总是比全位移控制的目标函数更小,尤其是在位移幅值较大时。该结果表明,在保证有效出力(即试件恢复力)的前提下,本文方法显著降低了无效出力,即优化了作动器出力的分布。
5 结 论
本文主要研究双向混合试验的加载控制方法。针对双向混合试验中存在的位移耦联问题,阐述了坐标转换、恢复力求解和质心位移求解等问题,提出了基于迭代的作动器位移命令更新方法和冗余作动器的力控制策略,并通过数值模拟与试验加以验证。主要结论如下:
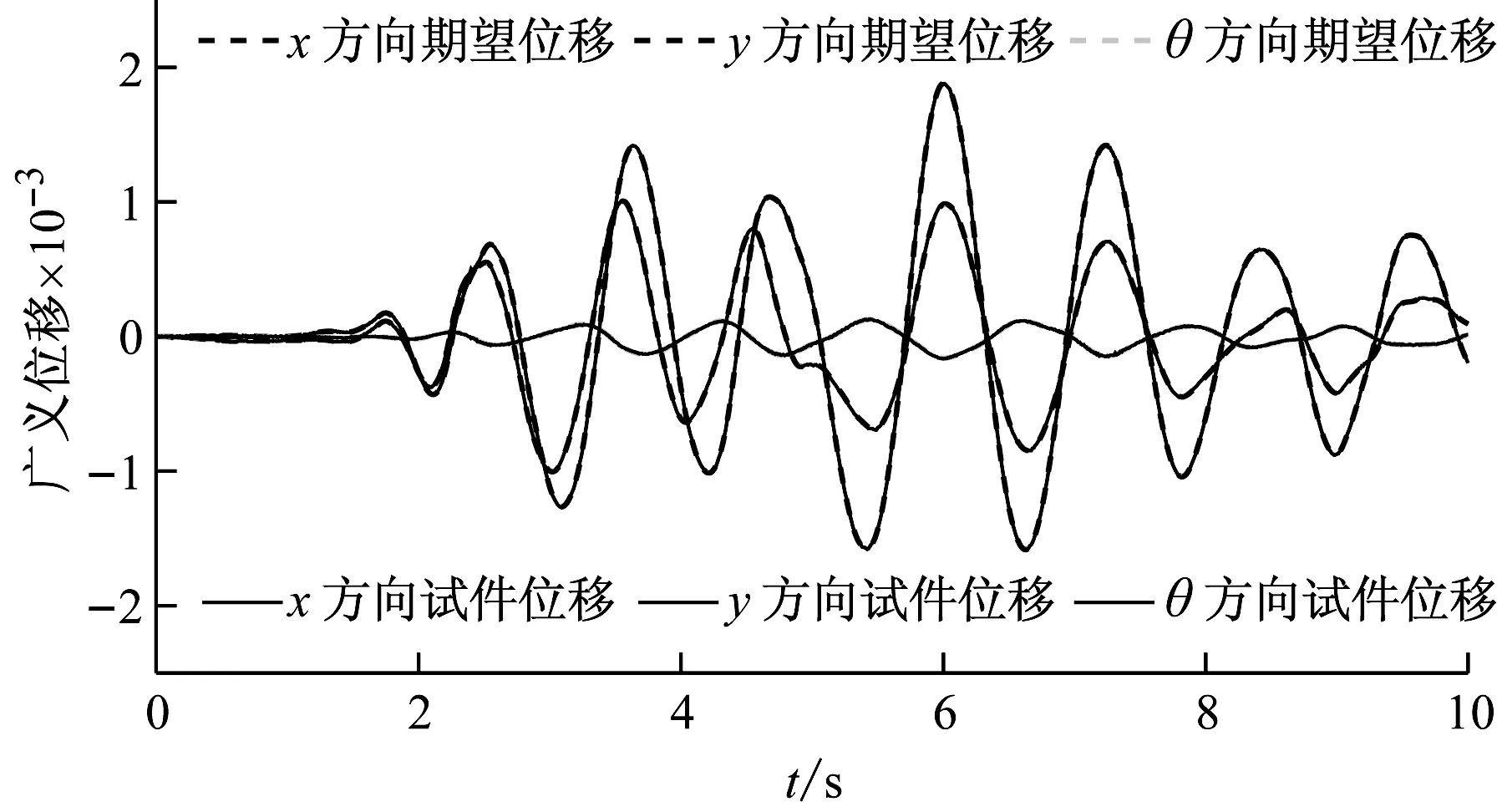
(a)全局图
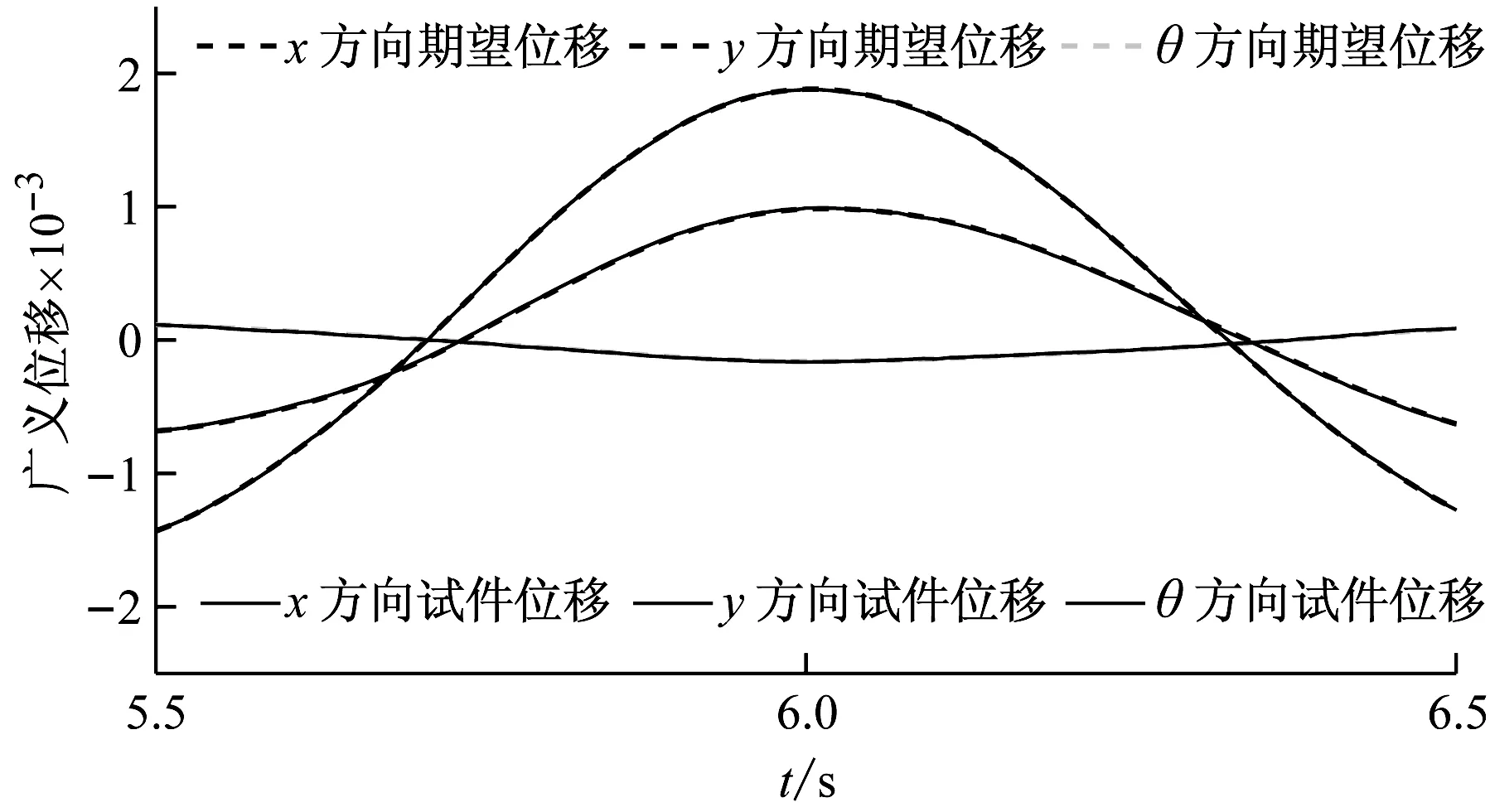
(b)局部

图7 目标函数对比Fig.7 Comparison of target function between proposed method and full-displacement-control method
(1)考虑到试验中位移、力等存在的几何非线性耦合关系,建立了坐标转换关系,模拟与试验结果均表明,该转换关系正确有效。
(2)提出基于牛顿迭代的作动器位移命令更新方法,利用雅可比矩阵合理协调作动器之间的加载关系,使试件快速准确地达到目标位移。
(3)提出冗余作动器的力控制策略,能协调作动器之间出力关系,充分发挥作动器的加载能力。试验结果表明,优化效果显著。
