VR技术在农业机器人操作上的应用
2019-05-27张新昌
张新昌
(南京铁道职业技术学院,南京 210031)
0 引言
近年来,我国对于农业领域智能控制的应用加大了研发力度,尤其在农业机器人的应用方面。同时,虚拟现实技术(简称VR技术)在国内外的机械、设计、影视、建筑等行业均得到了迅速的发展,如利用VR仿真技术对采摘机器人进行虚拟仿真,利用远程监控方法对割草机器人进行实时监控,通过智能核心算法对图像的识别与机器人准确定位,利用核心工作原理实现VR场景装配可视化及生产遥控等。图1为某试验基地农业机器人作用场景,为了充分发挥当前计算机的虚拟技术水平,进一步提高农业机器人的应用广泛性与便捷性,在当前研究理论的基础上,将VR技术与农业机器人操作环节进行结合,展开深层次的探讨。
1 机器人概述
农业机器人主要分为施肥机器人、除草机器人、采摘机器人及分拣果实机器人等,旨在提高农业生产收益率,降低人工劳动率。其通过气动机构与电机旋转机构、CCD摄像头等设备实现在保证蘑菇完好性的状态下完成采摘作业;在自然场景下通过R-G色差定位及约束算法实现苹果目标匹配,通过测试所需作业空间,配备压力传感器、光电传感器等实现苹果高效率采摘。这其中大多数采用了以图像信息处理为基础的模式识别技术和以适合运动控制的智能算法为精准动作技术,关键核心技术集中在识别、定位、感应与控制方向。图2为VR技术在农业机器人的核心应用构成,可表述为:通过用户对农业机器人进行3D场景建模,建立与现实世界一致度为90%以上的虚拟作业环境,进而在中心控制模块、传感器模块的作用下进行检测与反馈动作,做出实时调整与同步控制。

图1 农业机器人作业场景外观图Fig.1 Appearance diagram of the operation scene of the agricultural robot
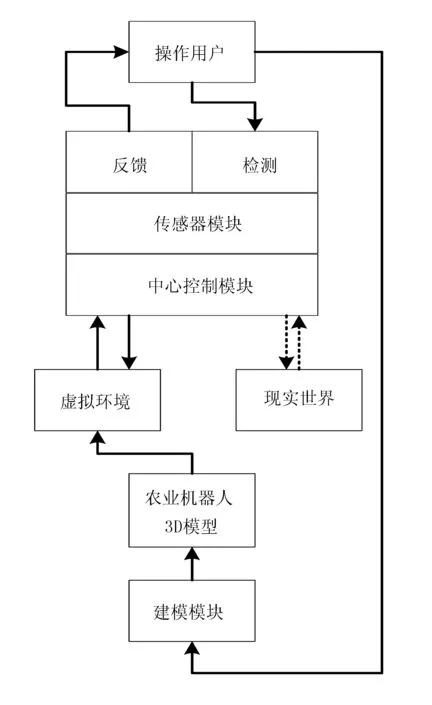
图2 VR技术在农业机器人上的核心应用构成Fig.2 Core application composition of VR technology in agricultural robots
为实现VR技术与农业机器人操作可靠衔接,设定基于VR技术的农业机器人操作控制流程(见图3),将这一应用过程依据实际工作需求划分为任务层、状态层与综合控制层3个层次。任务层主要从VR视觉与定位、农业机器人靠近作物、进行作业操作和返回至指定位置4个动作环节展开,状态层针对运动轨迹的生成与调节、算法与反应等操作起到良好衔接的效果,综合控制体现了VR特征与操作决策、数据处理与行为控制等指令。
2 作业设计
2.1 数学模型建立
选定农业机器人运动的位姿,结合VR作业场景的特征,在农业机器人执行动作坐标系(见图4)下,设(X,Y,P)为农业机器人运动坐标系,(x0,y0,o)为虚拟场景全局坐标系,对其操作执行核心环节建立运动模型。
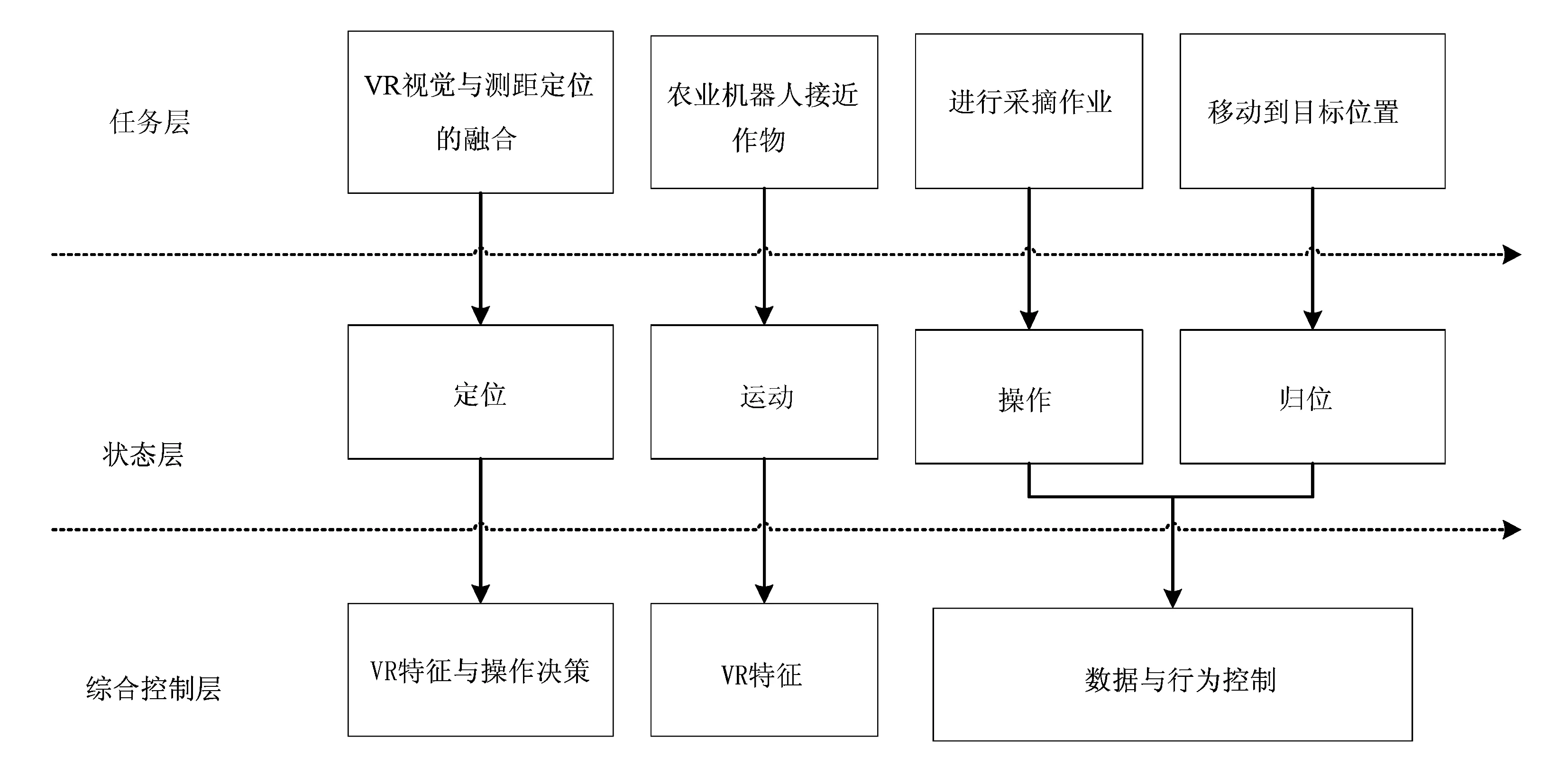
图3 基于VR技术的农业机器人操作控制流程简图Fig.3 Brief diagram of operation control process of the agricultural robot based on the VR technology
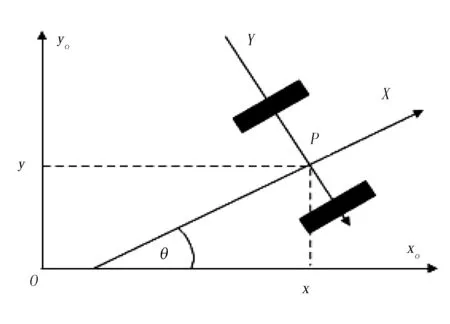
图4 农业机器人执行动作坐标系Fig.4 Coordinate system of the operating actions of the agricultural robot
农业机器人运动臂沿直线运动时,有
(1)
农业机器人运动臂有弯度运动时,有
(2)
式中θ—农业机器人运动角度(rad);
vL—农业机器人运动线速度(m/s);
vR—农业机器人运动角速度(rad/s);
l—农业机器人运动轮距离(m);
t—农业机器人动作时间(s)。
利用图像变换矩阵理论,得
(3)
(4)
(5)
(6)
式中ai—农业机器人运动臂长度(m);
di—农业机器人关节偏移量(m);
αi—农业机器人运动臂旋转角度(rad);
θi—农业机器人关节弯曲角度(rad);
i—农业机器人运动臂编号;
C—余弦三角函数;
S—正弦三角函数。
2.2 VR建模设计
构建VR环境,主要从农业机器人本体和周围场景两大部分展开设计,首先通过三维绘图软件SolidWoks实现农业机器人核心部件尺寸的精确测量与配合测定,然后通过3DMAX完成作业场景的真实渲染。
建立如图5所示的农业机器人在VR场景下的物理模型,并给出主要关键设计步骤,通过动作建模与场景设置实现VR作业平台的合理搭建,进行应用探讨。VR场景农业机器人操作建模设计如表1所示。
2.3 VR软件控制
通过采用OpenGL实现硬件设置与软件控制的准确衔接,软件控制程序主要依据VC++编程理论展开。通过对农业机器人操作控制平台进行合理划分,分别形成虚拟场景、控制操作、路径规划、碰撞检测与智能通讯5个核心控制执行程序,主要流程框图如图6所示。
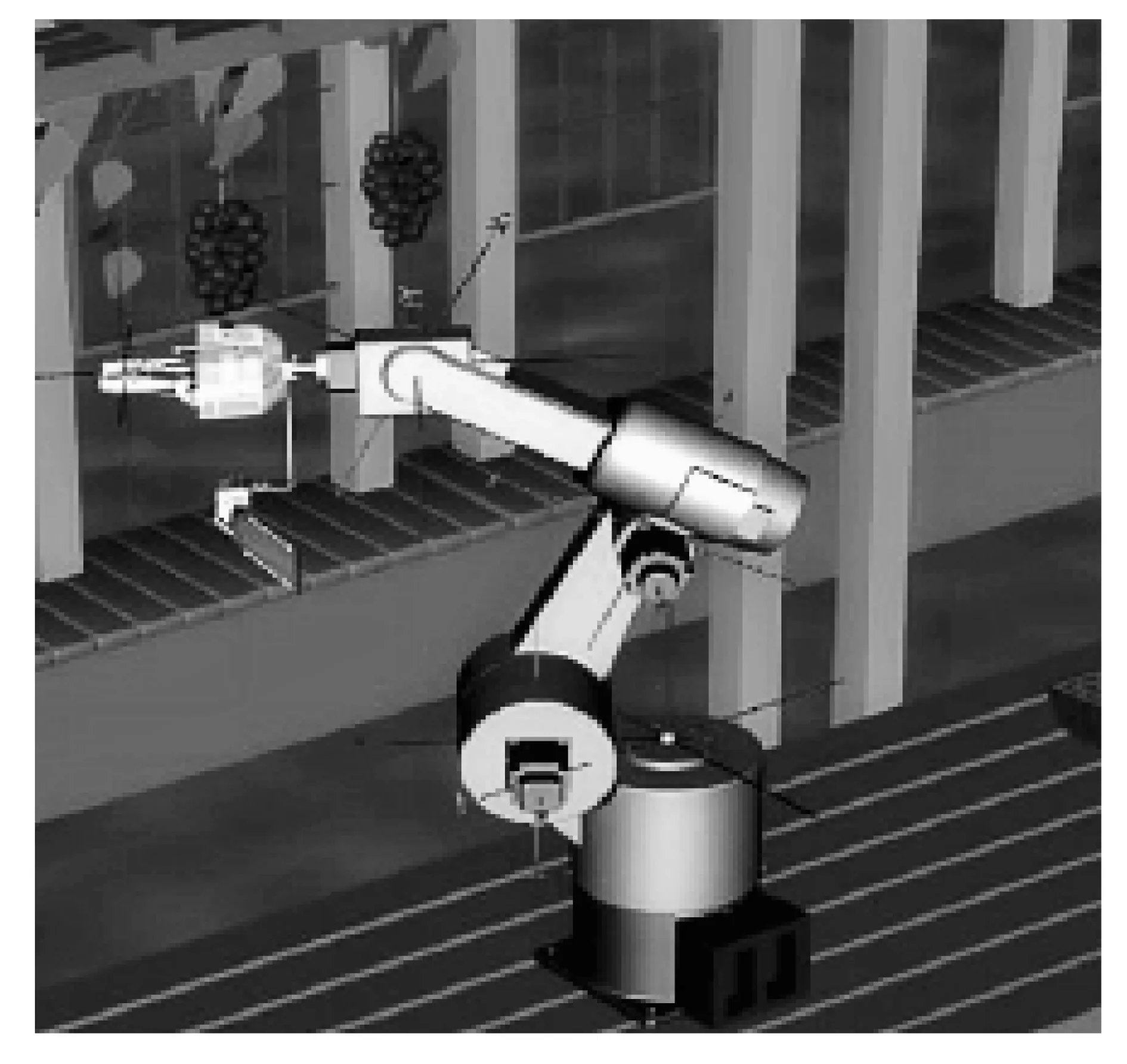
图5 农业机器人在虚拟场景下的物理模型Fig.5 Physical model of the agricultural robot in virtual scene表1 VR场景农业机器人操作建模设计Table 1 Agricultural robot operation modeling design under the VR scene
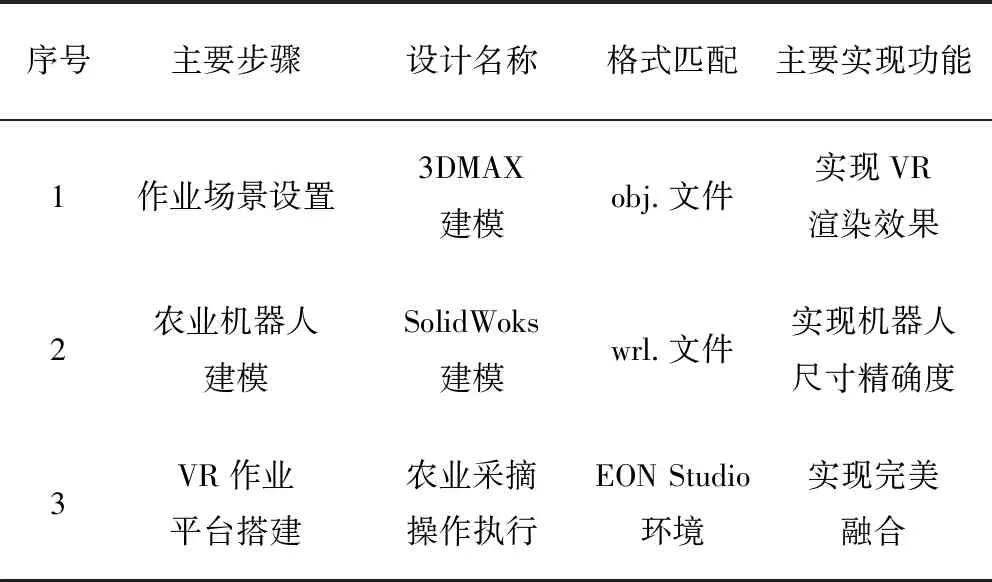
序号主要步骤设计名称格式匹配主要实现功能1作业场景设置3DMAX建模obj.文件实现VR渲染效果2农业机器人建模SolidWoks建模wrl.文件实现机器人尺寸精确度3VR作业平台搭建农业采摘操作执行EON Studio环境实现完美融合
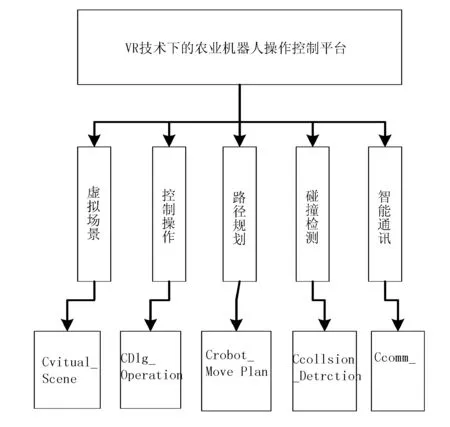
图6 VR技术下的农业机器人操作软件控制框图Fig.6 Operating software control block diagram of the agricultural robot under VR technology
VR技术路径的规划利用农业机器人运动函数库、采集信息分析与传递、中心控制综合决策与智能通讯模块等功能实现VR技术路径的规划,此次给出部分程序代码如下:
Void Rotation::RMiddle(GLfloat array[ ])
{
for(int i = 0; i < MINSIZE; i++)
{
if(array[i]!= RMemberAngle[i])
{
RFreeN[i] = array[i] - RMemberAngle[i];
If(RFreeN[i] >= 0.0f && RFreeN[i] <0.1f‖
RFreeN[i] < 0.0f && RFreeN[i] > -0.1f)
{
RMemberAngle[i] = array[i];
if(if continue == 1)rcontinuous = 1;
}
RMemberAngle[i] += RFreeN[i] 160.0f;
}
}
}
3 应用试验
3.1 场景设置
进行VR场景下的农业机器人操作试验,该平台包括硬件连线与软件调控系统。通过一系列的条件变换,获取VR试验的目标参数,鉴于此,设置基础条件为:
1)将摄像头、压力传感器、超声波传感器、运动控制器及智能接口等调试好;
2)图像识别、传输信息、动作监测等各环节的程序编制准确;
3)视频捕捉与VR操作协调完整,整个VR作业场景连贯性好。
图7为VR场景下农业机器人操作实现过程。将行为建模与运动轨迹规划同步输入,在核心控制算法和指令动作反应算法的信息融合之下,进行机器人的运动避障、移动、采摘、回归原位等系列具体操作。
3.2 试验分析
进行试验,针对农业机器人从移动-定位-抓取-归位一整套操作流程进行监测并记录数据,共6次,如表2所示。由表2可知:基于此操作系统进行的试验,动作路径长度控制在200~300cm范围内,其间选取的监测关键控制点数为35~45个范围内,路径的避障率可达83%以上,农业机器人的动作执行效果良好。
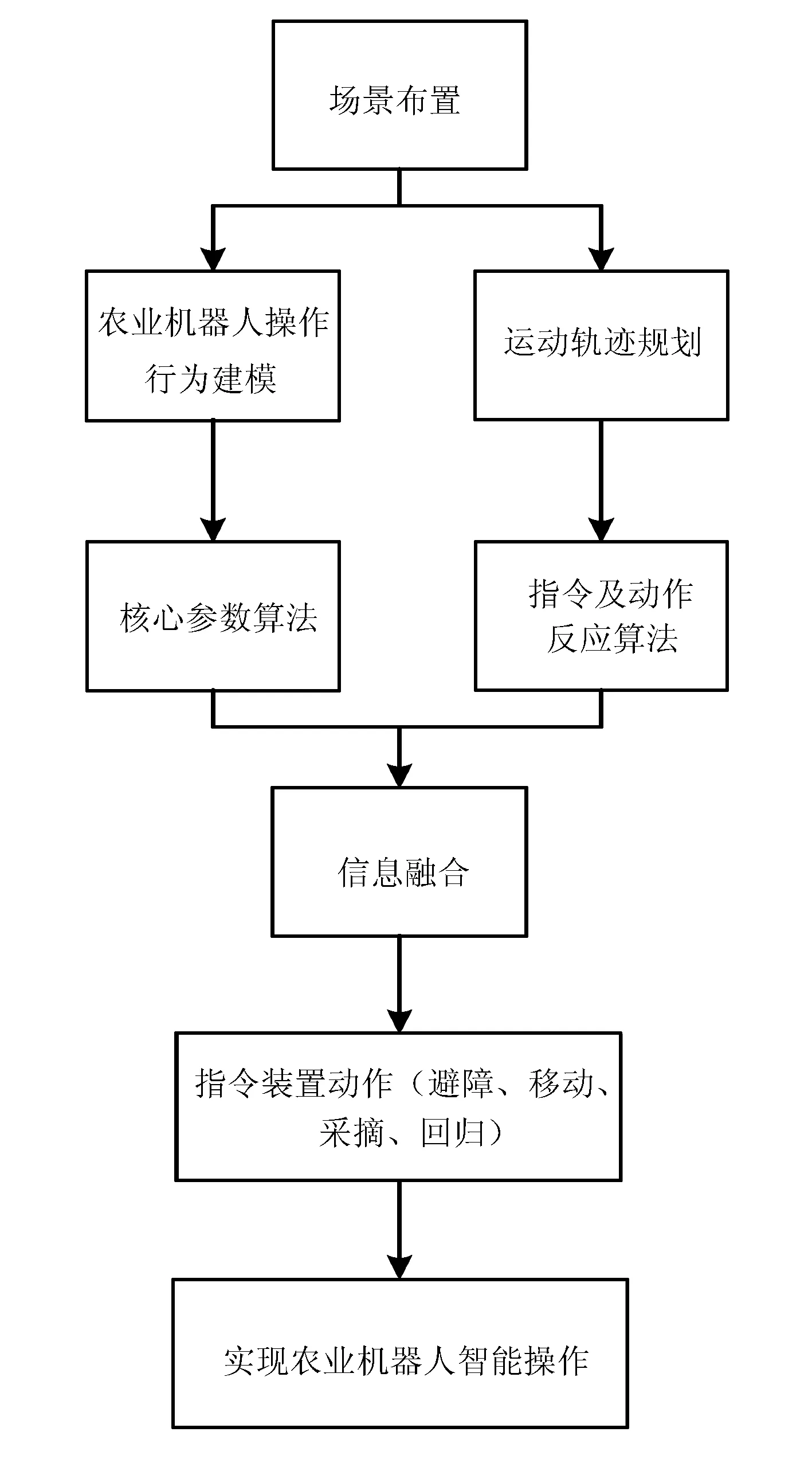
图7 VR场景下农业机器人操作试验Fig.7 Operation test of the agricultural robot under the VR scene表2 VR场景下农业机器人操作数据统计Table 2 Operation data statistics of agricultural robots in VR scene
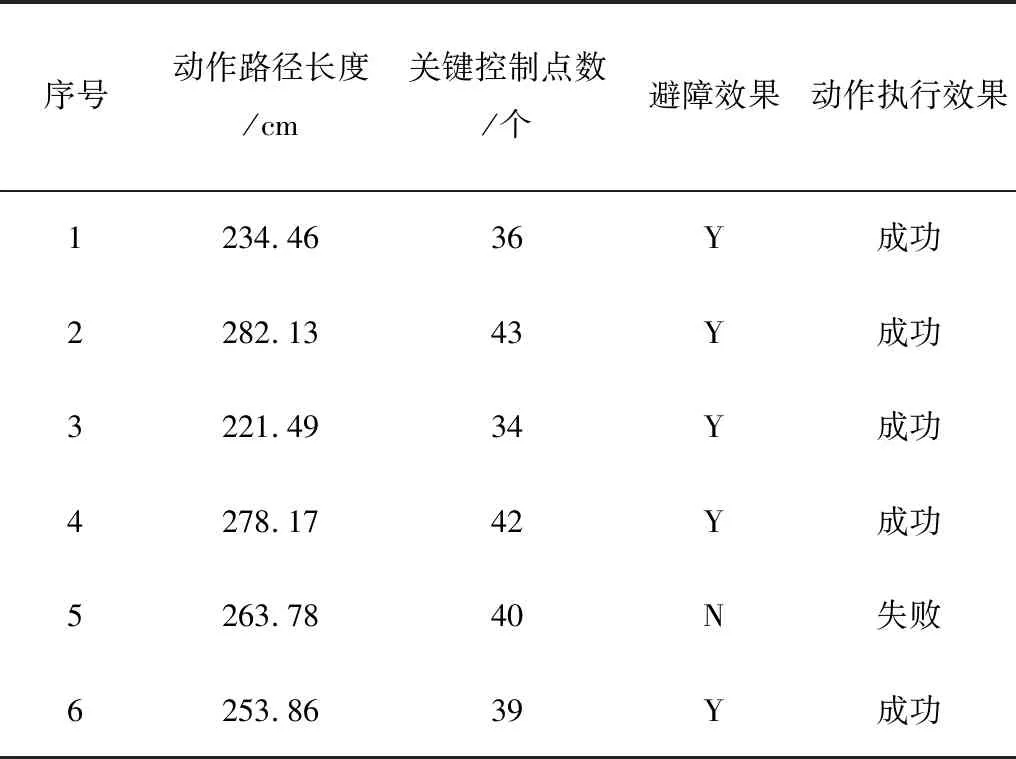
序号动作路径长度/cm关键控制点数/个避障效果动作执行效果1234.4636Y成功2282.1343Y成功3221.4934Y成功4278.1742Y成功5263.7840N失败6253.8639Y成功
试验过程选取关键参数进行效果分析,形成如表3所示的农业机器人VR试验效果表。由表3可知:在X向定位精度和Y向定位精度同时设定目标值为95%的基础上,经换算处理的VR环境下指标分别为97.25%和96.75%,满足设计要求;选定农业机器人的准确避障率和路径执行准确率均符合96%的设计要求;经换算处理的VR环境下指标分别为96.95%和97.05%,整体应用效果满足设计目标,表明对农业机器人操作应用VR技术的做法可行。
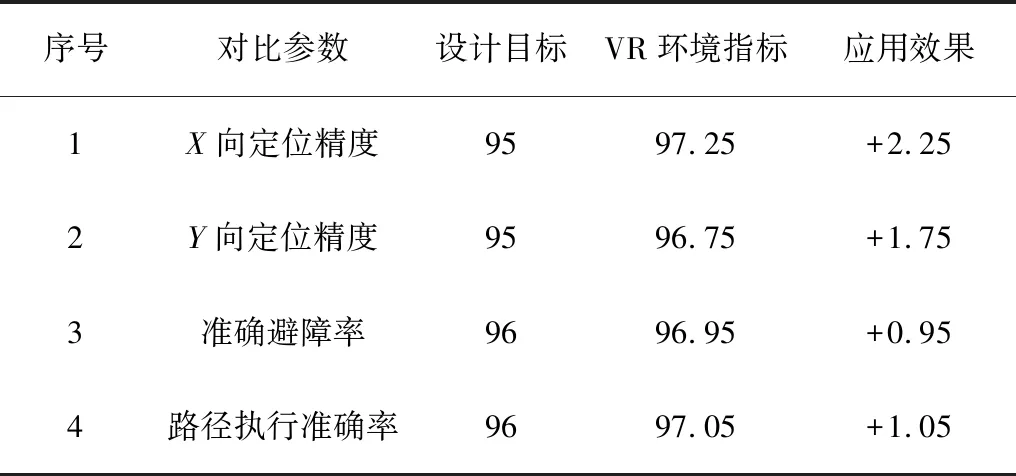
表3 农业机器人VR试验效果Table 3 Test results of the agricultural robot in VR scene %
4 结论
1)通过将VR技术与农业机器人作业原理有效结合,对机器人操作场景进行模拟,创造一个接近现实的逼真作业环境。
2)根据农业机器人操作机理,建立运动部件的数学模型,通过SolidWorks形成三维建模并优化处理后导入3DMax进行场景加载与虚化,参数与核心算法进行后台控制,实现VR试验仿真。
3)基于VR技术的农业机器人操作过程平台搭建,实现了机器人操作的可视化与准确化,VR试验下的机器人避障率和路径执行准确率均可达到95%以上。该应用研究可为基于VR技术的其他智能设备改进提供一定思路。
