高架草莓移栽机控制系统设计与试验
2019-05-27刘继展
李 男,刘继展
(江苏大学 现代农业装备与技术省部共建教育部重点实验室,江苏 镇江 212013)
0 引言
草莓作为一种经济效益极高的农产品,种植面积逐年增大[1-3],随着设施农业的发展,草莓的栽培方式也有了新的发展—由地面种植转向高架栽培[4]。草莓的高架基质栽培,减少了污染,有效降低了土壤因素带来的不良后果。高架栽培将栽培床的高度提高到作业者舒适的管理高度,省力,降低劳动强度[5-8]。因此,为了进一步节省人力,提高管理效率,草莓苗实现机械化移栽非常必要。
目前,草莓移栽主要是由人工完成[5],国内外未见到草莓移栽机相关报道。人工移栽效率低,劳动作业强度大,根据果农描述,单人移栽草莓苗约为300株/h。目前,市场上的移栽机控制系统结构复杂性较低,研制高级的控制系统具有重要意义。
1 高架草莓移栽机结构与控制系统需求
1.1 整机结构及作业原理
高架草莓移栽机主要由自主行走底盘、取苗与变距换向机构、穴盘苗间歇输送机构、竖直运动单元、打孔单元、水平移送及让位单元、控制系统,以及框架组成[5-6],如图1所示。
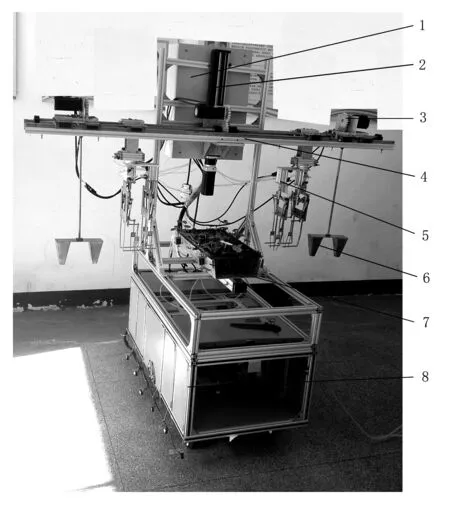
1.控制箱 2.竖直方向(Z轴方向)输送单元 3.同步让位机构 4.水平方向(X轴方向)输送单元 5.气动取苗及变距换向单元 6.打孔器 7.穴盘苗输送单元(Y轴方向) 8.自主行走式移动底盘图1 高架草莓全自动移栽机Fig.1 Three-dimensional model of an elevated strawberry automatic transplanter
高架草莓苗移栽采用穴盘苗育苗,育苗盘规格为32孔(4行8列),单孔为四棱台型,上下表面尺寸分别为6.3cm×6.3cm和2.0cm×2.0cm,穴孔深度为11cm。利用育苗穴盘的规格特点,该移栽机实现整排同取双侧高架栽培槽的对称移栽。
1)遥控移栽机行走至高架栽培槽中间,按下遥控器上“作业”按键;
2)取苗爪移送到穴盘苗上方,同时打孔锤运动至高架槽上方,打孔器依据高架高度仿形打孔,取苗指刺入草莓苗坨[7];
3)竖直运动单元带动水平机构上移拔苗,同时打孔器从栽培槽基质中拔出成孔;
4)打孔器让位,取苗爪移送到所打孔上方;
5)竖直运动单元带动水平机构下移放苗,同时穴盘苗间歇输送机构间歇送苗。
1.2 控制系统需求分析
根据高架草莓移栽机结构,并结合其作业原理分析,得出移栽机控制系统需求如表1所示。
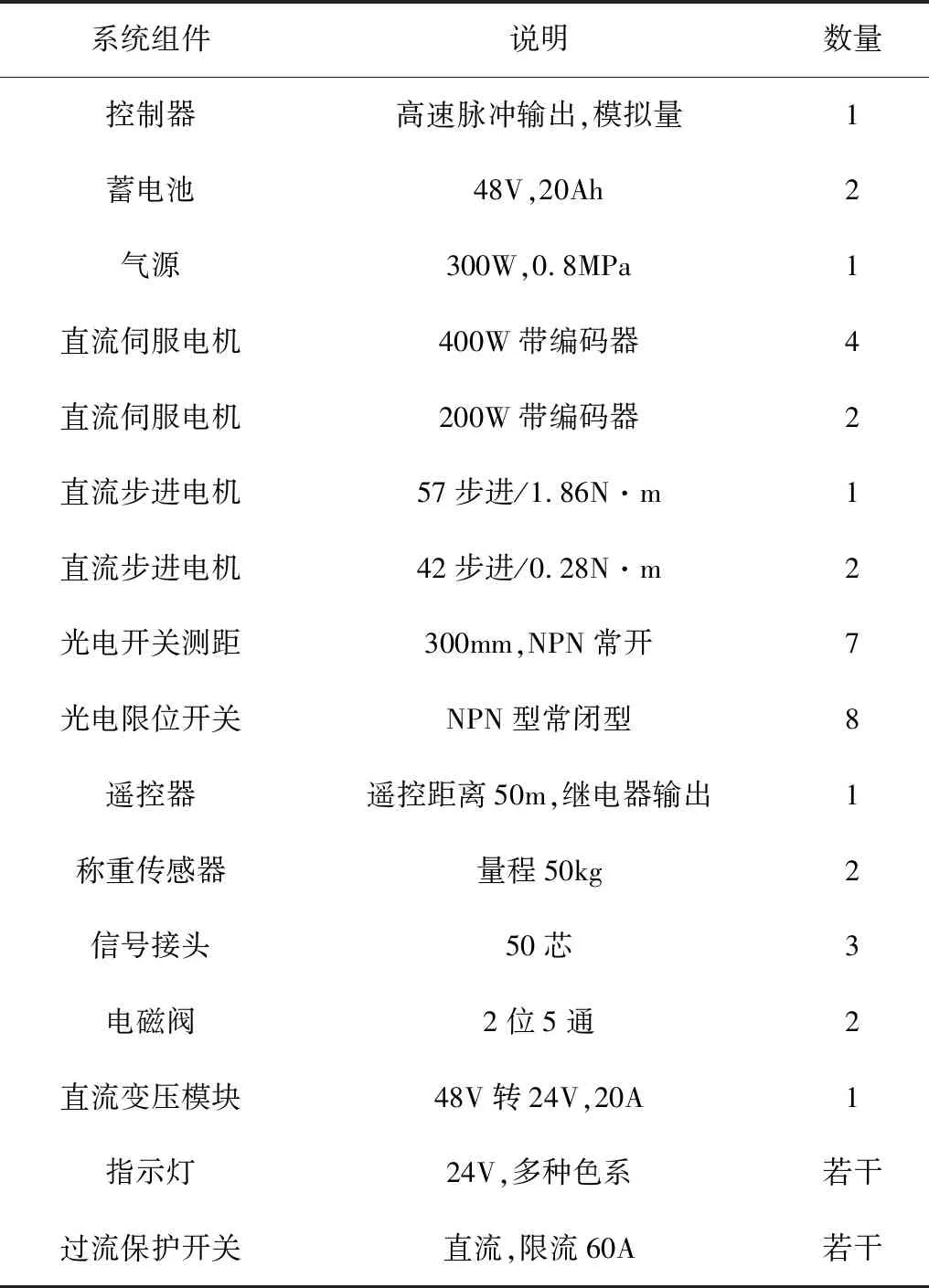
表1 控制系统需求表Table 1 RequirementsTable of control system
2 控制系统硬件设计
高架草莓穴盘苗全自动移栽机的设计目标是实现少量人工干预的自动化移栽技术,本文设计遥控和自动作业两种嵌套控制方式,目的是实现遥控底盘行走进入高架环境及高架间自动仿形作业的功能[8]。
2.1 系统方案设计
高架草莓移栽机控制系统涉及到6个伺服电机、3个步进电机、7个光电测距开关[9]、8个光电限位开关、2个称重传感器、两类气缸(2个电磁阀),以及遥控器与接收装置,其原理框图如图2所示。
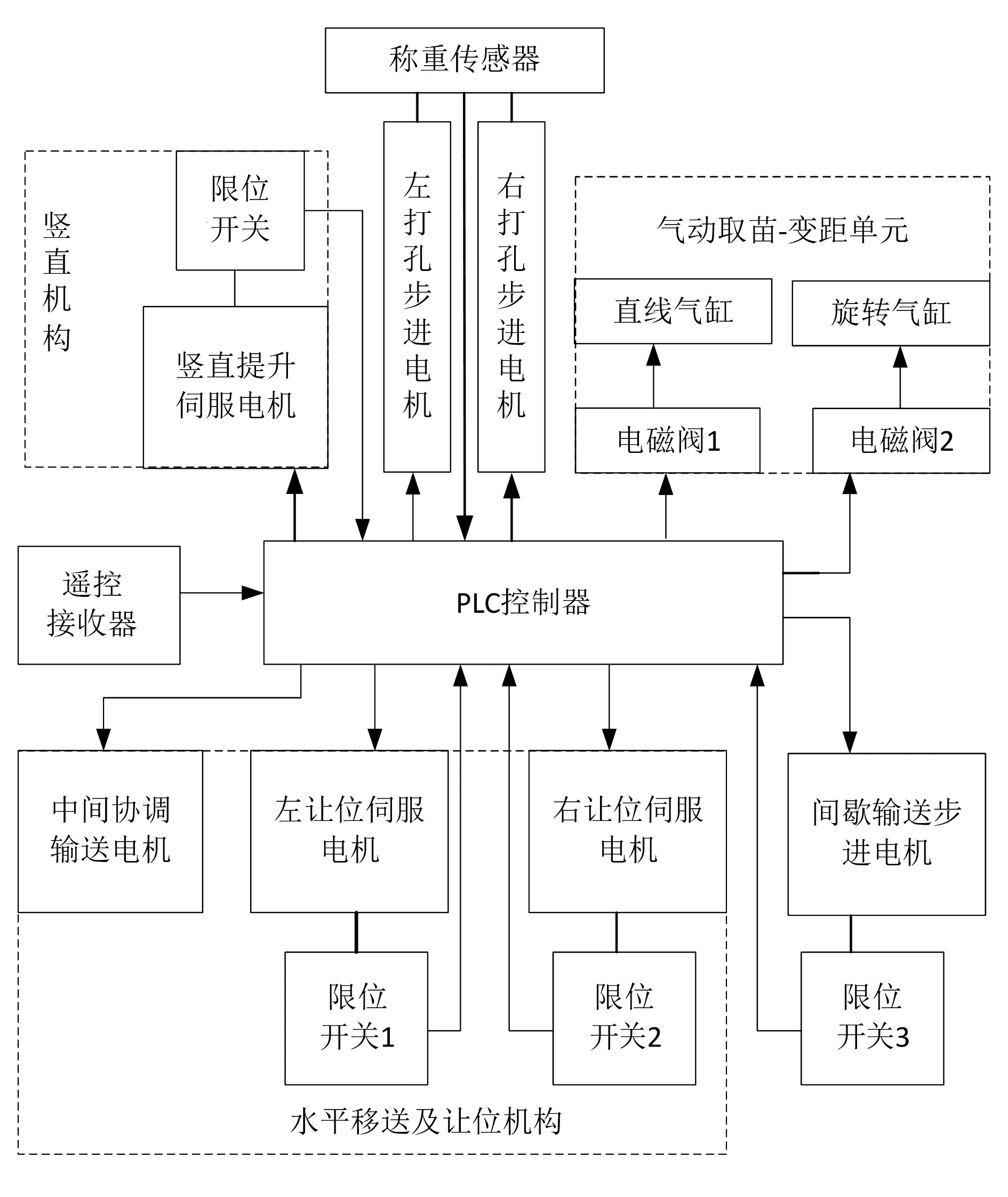
图2 移栽机控制系统框图Fig.2 Block diagram of the control system of transplanter
2.2 基于PLC的控制系统硬件设计
2.2.1 PLC 控制器
PLC是整个控制系统的核心[11],主要负责给伺服电机或步进电机提供驱动脉冲信号,采集光电开关信号、称重传感器信号、遥控器接收信号,从而实现高架草莓移栽机的自动仿形精确作业。
移栽机控制系统采用无锡信捷公司针对运动控制开发的10轴独立脉冲控制PLC-XDM-60T10-E,并扩展两路压力测量模块XD-E2WT-A。与其他PLC相比,信捷XDM-60T10-E系列PLC,具有更多的脉冲输出接口,单机就能独立控制10个伺服或步进电机,且价格较为合理,是开发高架草莓移栽机的最佳选择之一。
2.2.2 系统硬件电路设计
信捷PLC端输出的是“负”脉冲信号,因此伺服电机或步进电机驱动器一侧选择共阳极连接,即将驱动器一侧的“PLS+”“DIR+”与 “电源+”相连,“PLS-”“DIR-”分别接PLC一侧的脉冲输出端,与电机转向控制端,如图3所示。
3 控制系统软件设计
根据移栽机作业原理,在硬件设计的基础上,围绕高架高度差自适应方法,水平移送机构让位协调控制,分析移栽机各运动单元的先后动作顺序,并结合移栽机尺寸参数完成软件设计。
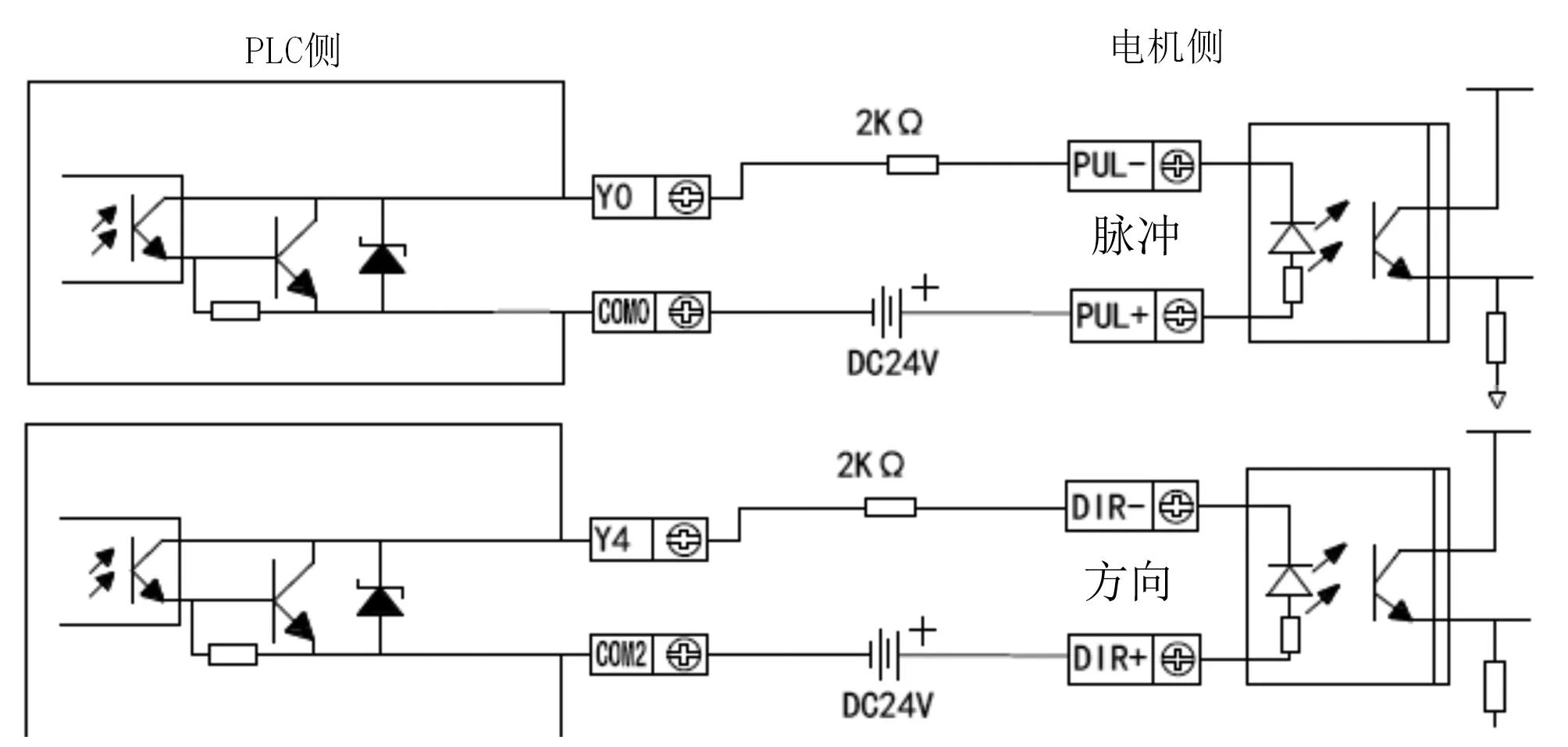
图3 典型的PLC控制电机接线图Fig.3 Typical PLC control motor wiring diagram
3.1 软降方案设计
由于高架草莓移栽机的作业过程复杂,因此软件采取模块化设计方案,即将软件按照作业原理分为遥控子程序和自动作业子程序。其中, 自动作业子程序包含有底盘前进、间歇送苗、仿形打孔、仿形放苗及取苗换向等子程序,如图4所示。
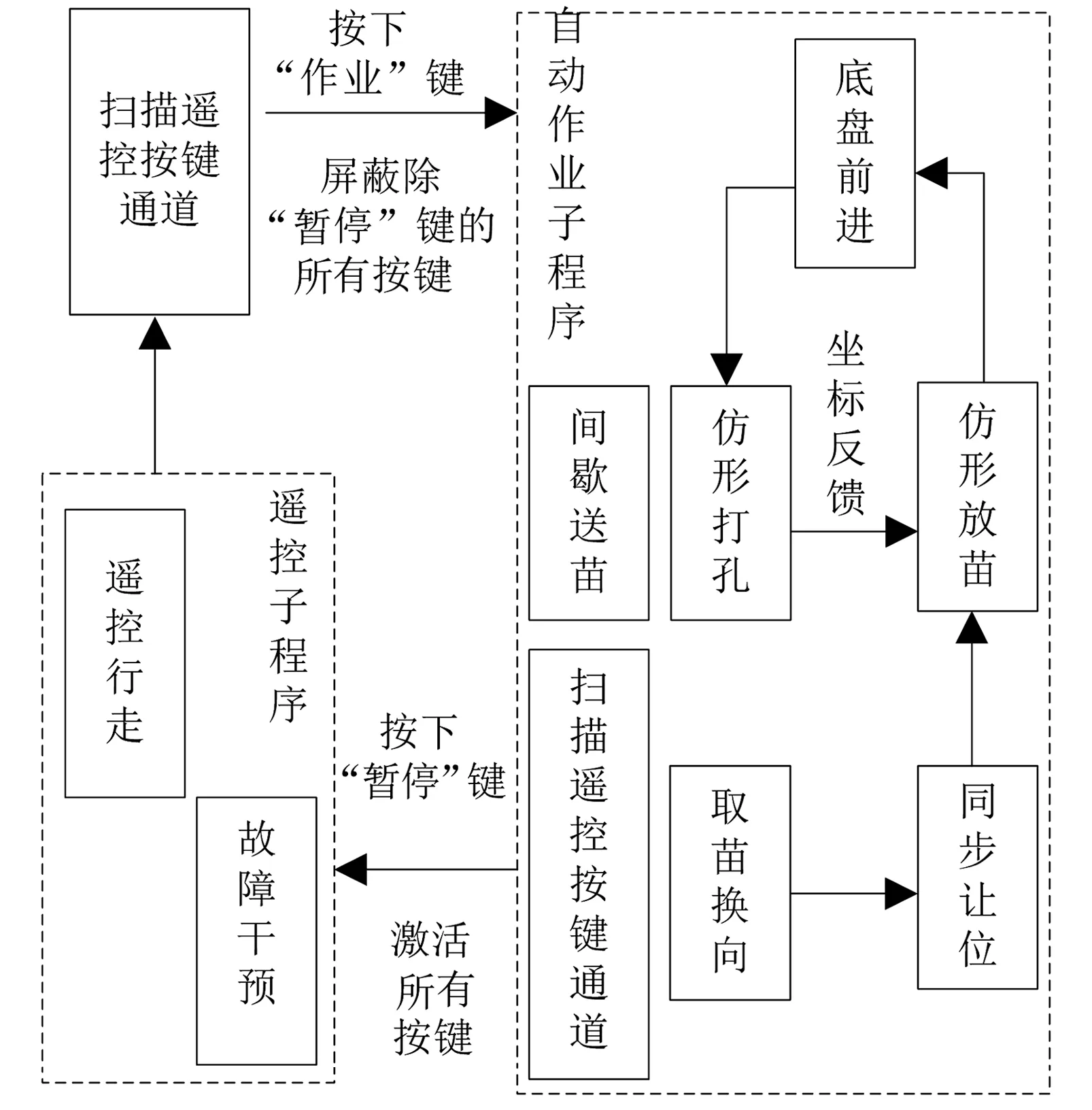
图4 控制系统模块化软件设计框图Fig.4 Block diagram of modularized software design for control system
3.2 基于PLC的控制系统梯形图程序
移栽机控制系统软件设计采用信捷PLC编辑工具软件,控制系统流程图如图5所示。
根据移栽作业流程得出移栽动作完成过程中各电机的先后动作顺序和动作距离,即完成草莓移栽机的多个电机联动控制,如图6所示。软件编写基于梯形图语言完成,信捷PLC集成运动控制模块,PLSF、PLSR等指令均为运动控制开发,可以发送可变频的脉冲、多段不同频率的脉冲控制信号,完成伺服/步进电机的控制。
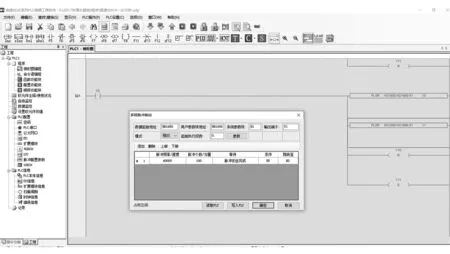
图6 信捷PLC梯形图程序编写及脉冲控制参数配置Fig.6 Programming of PLC ladder diagram and parameter configuration of pulse control
4 移栽机控制系统接线与试验
4.1 移栽机控制系统搭建
本文将草莓移栽机控制系统部件分别安装在底盘内部和移栽机框架两个位置。控制器、遥控单元、底盘行走单元及系统供电单元安装在底盘行走内部,移栽机控制子单元安装在移栽机的框架上,控制器控制信号通过50芯的屏蔽线连接控制系统的不同位置部件。图7为控制系统实物图。
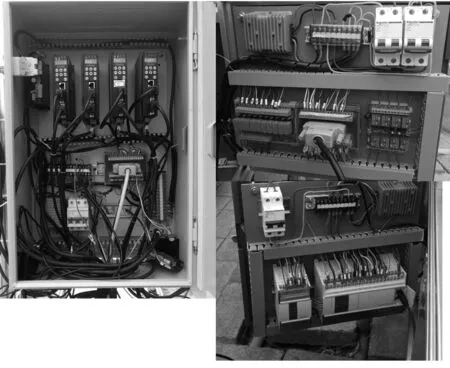
图7 高架草莓移栽机控制系统实物图Fig.7 The physical map of the control system of the elevated strawberry transplanter
4.2 移栽机控制系统试验
4.2.1试验背景与方法
根据田间实际情况在实验室搭建模拟的高架栽培环境,利用圆形钢管和无纺布制成高架栽培槽,栽培槽高度可调,长度为4m,栽培槽中所用基质为草炭、蛭石、珍珠岩,按照体积比3∶1∶1均匀混合而成。移栽用苗为利用花泥裁剪而成的仿真苗,苗坨为四棱台形,仿真苗坨上表面尺寸为60mm×60mm,下表面尺寸为20mm×20mm,高度为100mm。
由于高架草莓移栽机设计为双侧对称移栽,因此试验验证单边移栽效果,如图8所示。整排取苗完成后,穴盘苗间歇输送机构间歇送苗,测量每次间歇送苗的实际距离。试验由遥控器控制开始,整排苗移栽后,移栽机间歇前进20cm到下一个移栽工位。试验总共完成5盘仿真苗坨的移栽,每盘苗移栽完成后测量仿真苗坨的株距,行距与栽苗的深度。
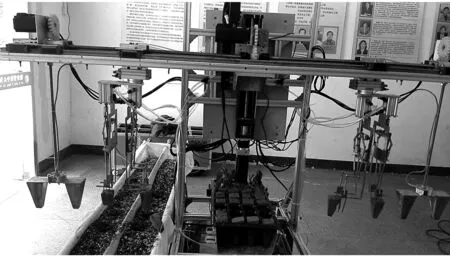
图8 高架草莓全自动移栽机试验照片Fig.8 Test photo of an elevated strawberry automatic transplanter
4.2.2 试验结果与分析
1)间歇送苗单元的定位精度。每盘穴盘苗共需要完成7次间歇送苗,每次间歇送苗距离为6.3mm,试验共完成35次间歇送苗,结果表2所示。
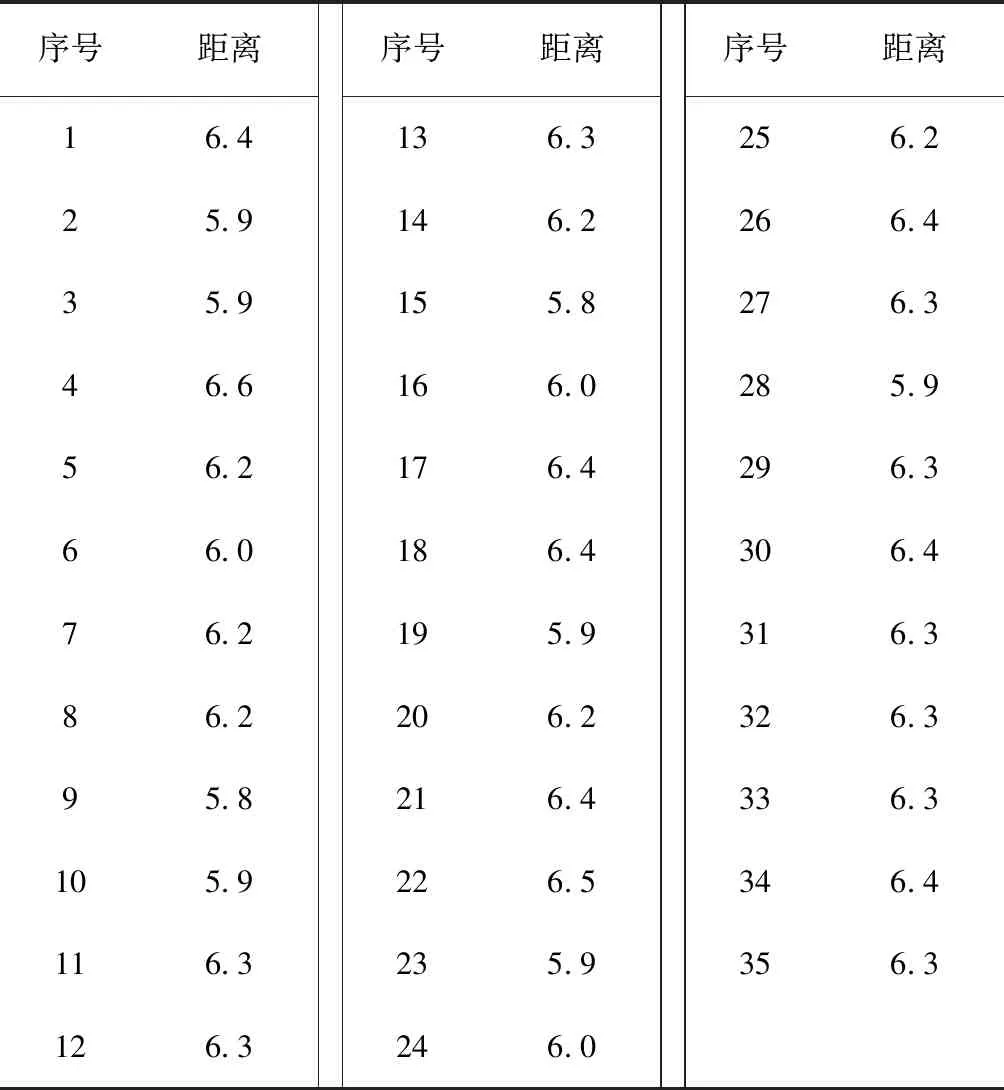
表2 间歇送苗输送距离统计Table 2 Statistics of transmission distance of batch seedling delivery mm
根据试验结果,平均间歇输送距离为6.2mm,小于设定的6.3mm,穴盘苗的质量导致负载增大所至。
2)仿真苗坨的移栽效果。试验共完成单侧80株仿真苗坨的移栽,移栽成功率为91.25%。有7株仿真苗移栽失败,其中3株放苗后仿真苗坨被带起,由于花泥的粘滞性大而质量轻,附着在取苗指上被带出栽培槽;2株在穴盘中取苗失败,由于取苗爪旋转变距没有到位,导致取苗指没有在苗坨上方造成的;2株送苗定位差别过大,没有放进所打的孔中。
试验共完成40排草莓苗的移栽,每排苗(4株)移栽平均耗时14.5s,移栽效率为993株/h。每排苗的移栽过程中上移拔苗,下行放苗,上行复位,频繁的上下移动耗时大,限制了移栽效率。完成仿真苗坨的移栽平均行距为20.0cm,平均株距为21.55cm,栽植的平均深度为0.7cm。
5 结论
1)根据高架草莓移栽机的结构和作业原理,分析实现自动作业控制系统的需求,完成了移栽机控制系统的硬件设计。
2)针对移栽机控制系统的复杂性,提出了模块化的软件设计原理,将软件按照作业功能模块拆分,并独立完成各子块的软件编写。
3)移栽机的仿真苗试验表明:所设计的控制系统能够很好实现高架草莓移栽机的自动控制作业,移栽成功率超过90%,移栽效率为993株/h。
4)研究虽然只针对高架草莓移栽机,但是对其模块化的编程以及对伺服电机的精确控制方法同样适用于其他复杂的农业机械的控制软件。
