基于改进Otsu算法的磨粒图像识别技术研究
2019-05-16刘德鹏刘新海张雪枫
刘德鹏,刘新海,张雪枫
(中车青岛四方机车车辆股份有限公司,山东青岛 266111)
0 引言
机械设备维护部门为了及时掌握设备的磨损状况,通常使用的铁谱仪装置分析周期较长,诊断过程易受人为因素的干扰,时常出现误判的情形。随着科研人员对磨粒图像处理技术研究的深入,为机械设备磨损状况的诊断提供了一种新的途径[1]。但现场采集到的原始磨粒图片通常存在背景模糊、不同类型的磨粒堆叠在一起相互干扰的问题。因此,准确地将某一待识别磨粒的轮廓从复杂的背景中提取出来,成为了较为关键的一个环节,即磨粒的阈值分割[2]。
1 传统Otsu算法
传统的Otsu算法将磨粒图片的像素点按灰度值分为两部分:一部分对应于要分割的磨粒;另一部分则对应背景。然后选取合适的阈值,并将小于该值的灰度值置零,达到提取磨粒轮廓的目的。
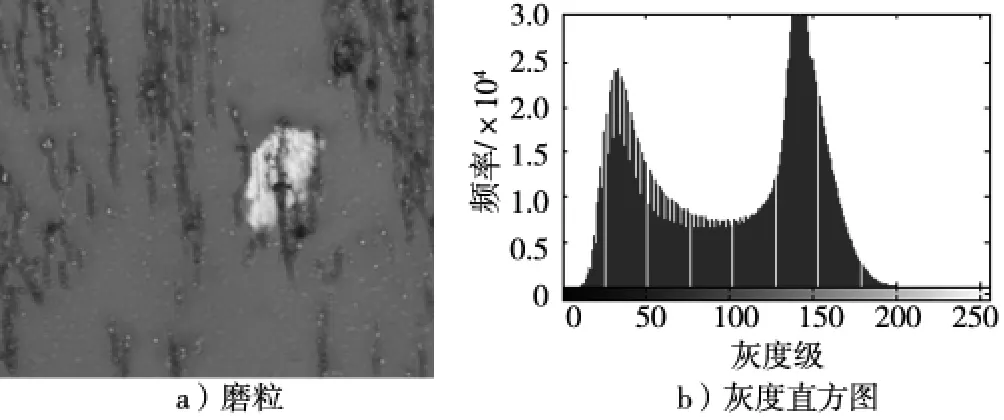
图1 磨粒图片及其灰度直方图
图1为刚采集到的磨粒图片,设磨粒图片的像素数为N,灰度值介于0与L-1之间,灰度级i对应的像素数为ni,则灰度分布概率可由式(1)和式(2)表示。

假设阈值为 T,则灰度值可表示为[0,T]和[T+1,L-1]两部分,定义C0区域为灰度值介于0与T之间的像素点,而C1区域为灰度值介于T+1与L-1之间的像素点,那么磨粒图片灰度分布概率的均值见式(3)。

而C0和C1部分对应的均值可由式(4)表示。

进一步简化,可得灰度分布概率的均值uT=ω0u0+ω1u1。这样,C0和C1两部分的类间方差则可表示为。使最大的值,便是传统的Otsu算法所要寻找的最佳阈值T[3]。
2 改进的Otsu算法
传统的Otsu算法只考虑了类间方差一个因素,使得用阈值分割出的两部分尽量远离图像的中心,却未考虑目标和背景各自类中的像素和各类中心之间的关系。针对该问题,将类内方差也引入到磨粒图片分割效果的评估中,在保证类间距离最大的基础上,确保分割的不同类均具有较好的内聚性。
已知灰度分布几率pi,则类内方差可定义为式(5)。

此时,在区间[0,L-1]内使得上式取得最大值的阈值便为该方法求得的最佳阈值T*,即。
因为同时考虑到2种方差,算法的计算量明显增大[3]。对于任何一副磨粒图片,磨粒区域和背景区域各自内部的方差值变动极小,只在磨粒的轮廓周边出现较大的波动,因此,利用方差信息取代均值信息可降低灰度的线性变化对磨粒分割的影响,提高算法的运算率。
磨粒区域Ci(i=0,1)内的类间方差,则磨粒区域C1与背景区域C0的总体方差可用式(6)表示。

求解出使得上式取得最大值的t,便是改进后算法的最佳分割阈值T*。
3 试验结果与分析
利用改进前后的2种算法对图1的磨粒图片进行处理,对比结果见图2。
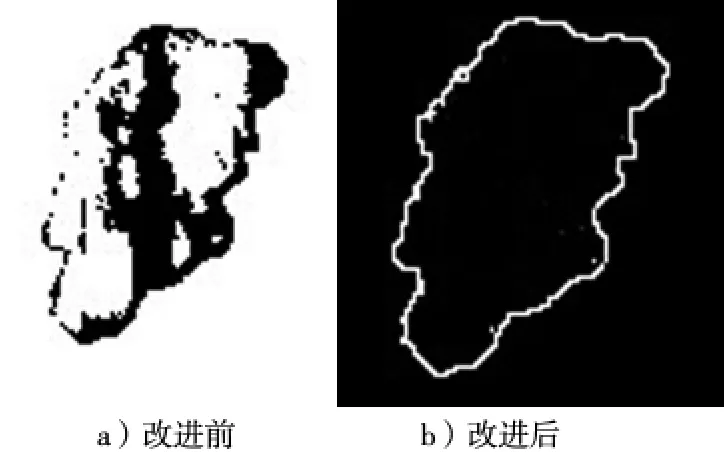
图2 磨粒分割结果对比
从图2可以看出,利用文中改进的算法,实现了磨粒与背景的完全分离,可以有效避免磨粒图片中背景噪声对磨粒特征参数提取的影响,提高磨粒识别的准确度[1]。
同时,为了进一步验证利用该算法提取的轮廓参数是否对判断磨粒类型有效,选取80幅现场采集的正常磨粒、片状磨粒以及严重滑动磨粒图片,经该算法处理后组成一个样本群,进行参数提取,并利用支持向量机原理设计了一个磨粒分类器,对其进行类型识别,分类结果如图3所示。3种磨粒均积聚到了各自对应的空间里,表示分类效果较好,进一步验证了该算法的可行性与通用性[5]。

图3 磨粒识别结果
4 结论
在研究传统的Otsu算法的分割原理之后,提出了一种利用铁谱图片的方差信息替换原有均值信息的分割算法,同时将类内方差也考虑在内,弥补了原有分割算法轮廓提取时容易出现边缘失真的缺点。实验证明,该算法对背景复杂的磨粒具有较好的分割效果。
