具有不确定参数的新混沌系统的参数辨识与自适应同步
2019-05-09孙常春
郑 莉, 孙常春
(沈阳建筑大学 理学院, 辽宁 沈阳 110168)
系统的混沌运动,产生于非线性,具有对初态的敏感依赖性、系统内的随机性、局部不稳定而整体稳定性.混沌行为广泛存在于工程、生物、经济、通讯等许多学科中.目前,学术界开始有越来越多的学者,提出了很多新混沌系统[1],譬如共存式系统[2],具有蝴蝶形混沌吸引子的类洛伦兹混沌系统,具有无穷多平衡点的混沌系统[3],具有二次曲面平衡点的四维混沌系统[4],等等.混沌广泛地应用于保密通信,数据加密、流体力学以及工程当中.1990年,美国海军实验室的T. L. Carrol等专家成功地让两个混沌系统实现了同步,而应用的方法便是驱动-响应法[5].目前,混沌控制和同步在许多领域有着极大的应用前景,如医学、通信、生物工程等.许多学者针对不同的混沌系统提出了不同的混沌同步方法[6],如不确定参数的自适应同步[7]、分数阶超混沌系统的完全状态投影同步[8]、基于主动自适应滑模控制的超混沌系统同步[9]、切换系统的控制及同步[10]、四维超混沌系统的计算机仿真及同步控制[11]、异结构混沌系统的混沌同步[12]等.本文提出了一个全新的三维自治系统,并利用非线性动力学的方法,研究了该系统的基本动力学特性,用MATLAB数学软件画出随时间t变化的相图、计算出系统平衡点随时间t变化的Lyapunov指数谱,验证了系统是混沌的.基于本文所给出的新混沌系统,参考自适应控制器的设计方法,验证了在本文设计的自适应控制器的作用下,驱动响应系统能达到渐近同步.并能准确地识别出响应系统的参数,通过数值仿真,进一步证明了控制器的有效性.
1 提出新的三参数的三维二次混沌系统
给出新的二次混沌系统,其参数为三个:
(1)
系统(1)的参数为a1,b1,c1,而对应的状态变量则为x1,x2,x3.在此系统中,非线性和线性项数量分别为6个和4个.若a1=15,b1=10,c1=8,那么该系统存在混沌吸引子,具体可参见图1.
2 新系统的动力学分析
2.1 耗散性
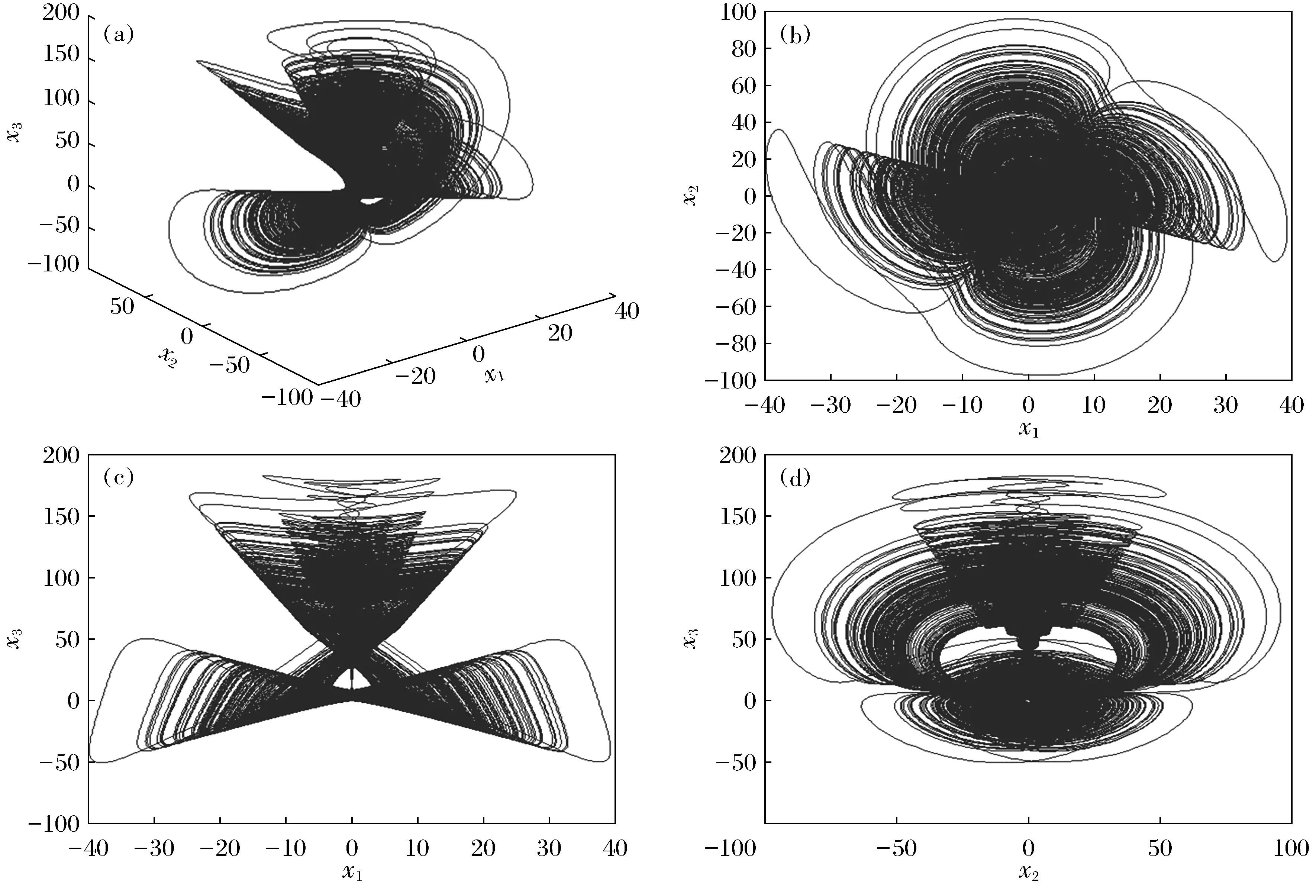
图1 当a1=15,b1=10,c1=8时,系统的混沌吸引子Fig.1 Chaotic attractor of the system with a1=15,b1=10,c1=8(a)—x1x2x3空间相图; (b)—x1x2平面相图; (c)—x1x3平面相图; (d)—x2x3平面相图.
2.2 Lyapunov指数谱
用MATLAB仿真得到该混沌系统当a1=15,b1=10,c1=8时的Lyapunov指数谱,如图2所示.可以看出系统的Lyapunov指数,LE1>0,LE2=0,LE3<0,且LE1+LE2+LE3<0,系统混沌.
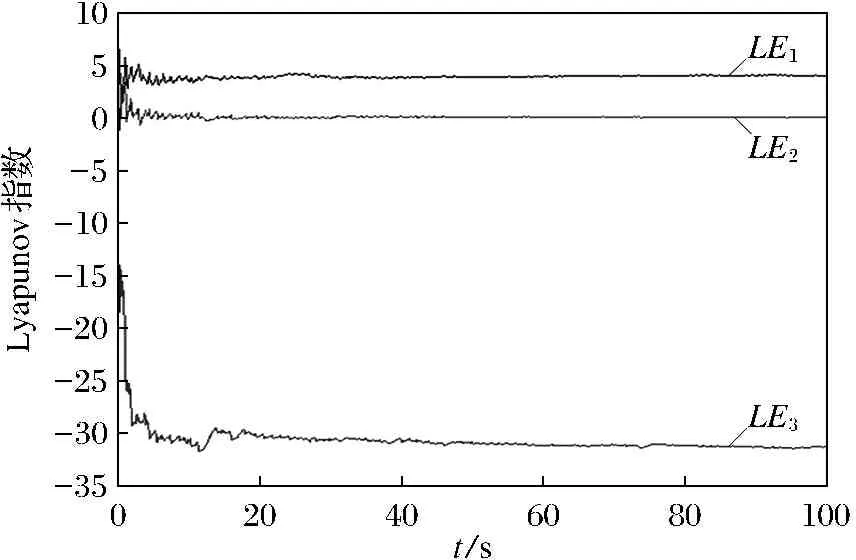
图2Lyapunov指数谱
Fig.2Lyapunovexponentspectrum
3 自适应控制器的设计
设系统(1)为驱动混沌系统,系统(2)
(2)
为响应系统.在u1=0,u2=0,u3=0时,即系统(1)未加控制器的情况下,选取驱动混沌系统的初始值为x0=(1,2,3),选取响应系统的初始值为y0=(1.1,2.1,3.1),这两个时间序列有细微的差别,但经过几次迭代后,系统轨道会迅速分离,走入完全不同的轨道,如图3所示.
a2,b2,c2为系统(2)中的未知参数,u1,u2,u3为控制器,e1=y1-x1,e2=y2-x2,e3=y3-x3为误差变量,则误差系统为

(3)
自适应控制器为
(4)
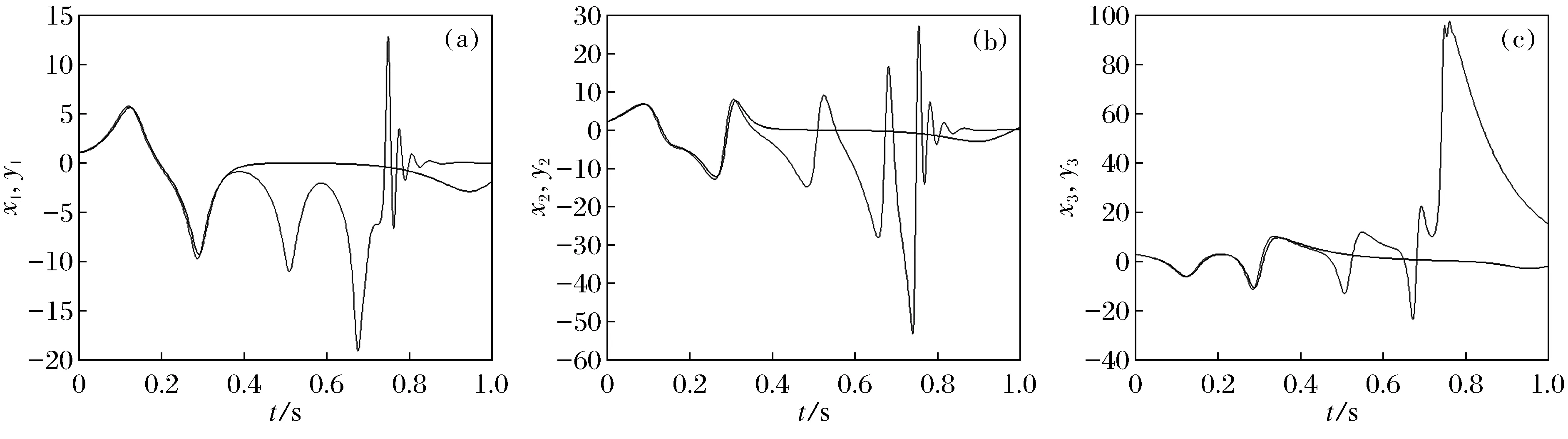
图3 未加控制时驱动系统和响应从不同的初始点出发的轨道随时间的变化

(5)
定理新提出的驱动混沌系统(1)与响应混沌系统(2)在选取了式(4)为控制器,式(5)为更新规则时,从任意初始值出发,轨道均可达到同步.


4 数值仿真
选取系统(1)和系统(2)中的初始点分别为:x0=(1,2,3)和y0=(3,6,9),由此可得系统(3)的初值:e0=(2,4,6),取a1=15,b1=10,c1=8,此时系统(1)的状态为混沌态,将系统(2)的初始参数设置为a2=0.01,b2=0.01,c2=0.01,接着通过管控装置(4)和相应的更新规则(5),对系统(1)和系统(2)的同步过程加以模拟,可以看出驱动系统与响应系统的轨线很快重合,也就是说,这两个系统实现了渐近同步,具体可参见图4、图5.
响应系统的参数本是未知的,在编程中将a2、b2、c2设为变量,在加入控制器后,用计算机模拟出a2、b2、c2随时间t变化的轨线,如图6,a2、b2、c2渐近地稳定在15、10和8,这与a1、b1、c1的取值完全相同,即在控制器的作用下,参数能被准确地识别出来.

图4 控制器作用下驱动系统及响应系统随时间变化相图Fig.4 Phase diagram of driving system and response system with time when controller is added(a)—控制器作用下x1及y1随时间变化相图; (b)—控制器作用下x2及y2随时间变化相图;(c)—控制器作用下x3及y3随时间变化相图.
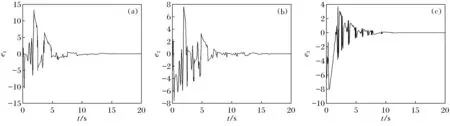
图5 控制器作用下响应系统和驱动系统的同步误差曲线Fig.5 Synchronization error curve of response system and drive system under the action of controller(a)—控制器作用下x1及y1的同步误差曲线; (b)—控制器作用下x2及y2的同步误差曲线;(c)—控制器作用下x3及y3的同步误差曲线.
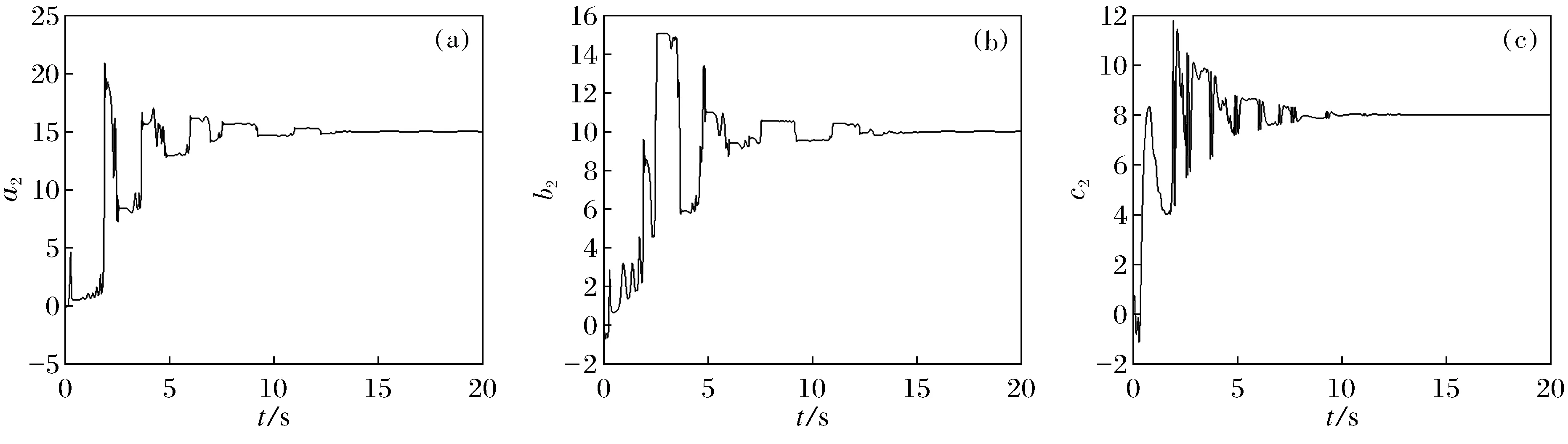
图6 控制器作用下的参数辨识过程Fig.6 Parameter identification under the action of controller(a)—控制器作用下a2的辨识过程; (b)—控制器作用下b2的辨识过程; (c)—控制器作用下c2的辨识过程.
5 结 论
本文提出了一个新的三维混沌系统,对该系统展开了相应的动力学分析,验证了系统的混沌性,设计了误差系统控制器,比较了加入控制器前后系统(1)、(2)轨线的不同性态,明确了参数更新规则,在理论上和仿真试验中都证明了控制器的有效性.
