光电式数种器的设计与试验
2019-05-08吕泽鑫郭慧东伍恒张航李风娟雷福祥周岭
吕泽鑫 郭慧东 伍恒 张航 李风娟 雷福祥 周岭
(塔里木大学机械电气化工程学院,新疆 阿拉尔843300)
千粒重[1]通常要数取一千粒完好的种子,再进行称量,其重量即为种子千粒重。但人工数取一千粒作物种子,不但增加了育种成本,而且计数也不准确[2]。数种盘[3]利用定量窝眼计数省时省力,但无法完成自动化的数种要求,且数种结果累加性较差。机械数种器[4-8]利用振荡原理将种子均匀的散布在平面上,再以种子流的形式依次通过光电传感器进行计数。数种器可以完成自动化的数种作业,但计数结果精确性不高,数种时间较长,振荡过程会损伤种子。基于计算机视觉识别技术的种子计数器[9]是将种子平铺在特定平台上,利用强光照射平台,再用计算机视觉识别技术捕捉种子在平台上所成的像。计算机视觉识别技术计数快速、多量,但强光照射会对种子胚芽有所损伤[10]。
针对上述问题,设计一种光电式数种器,数种器由计数系统、动力系统、收集系统和运送系统组成。具有快速数种、计数准确、损种率低、操作简便、适用性强等优点。
1 光电式数种器的组成及工作原理
光电式数种器(图1)主要由计数系统、动力系统、收集系统和运送系统四部分构成。
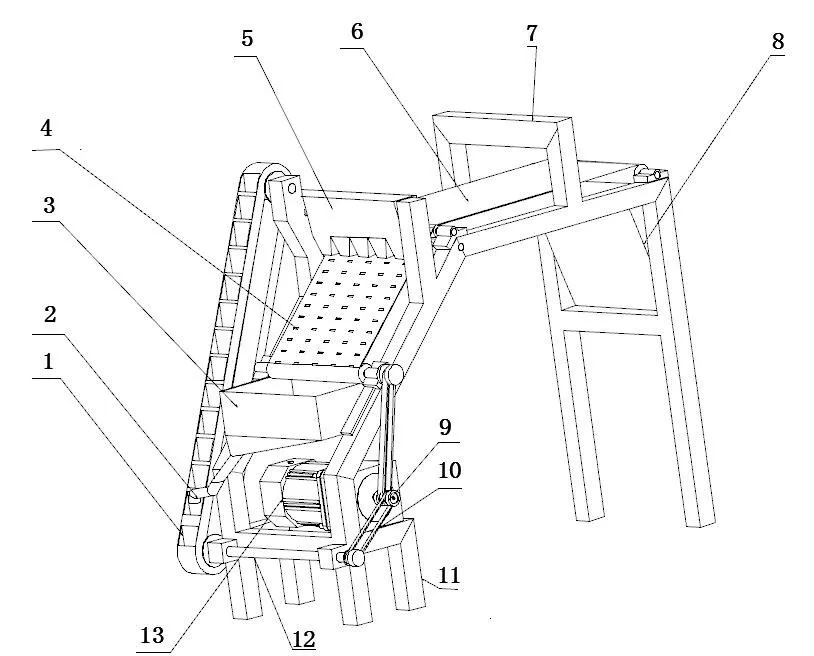
图1 光电式数种器
工作时,电机启动带动传送带匀速运转,将一定量的种子放到下种盒内,种子由下种盒下种口落下,散落在传送带上的计数凹槽内,计数凹槽内的种子随着传送带经过红外计数传感器,传感器接受模拟信号,单片机处理模拟信号转化成数字信号显示在显示屏上,计数过的种子落入接种盒内。未落入计数凹槽内的种子会沿着斜传送带掉入到收集箱内,由运种盒通过轨道重新进入下种盒循环计数。
2 主要结构设计
作物种子的形状大多是不规则的,不同时期的种子外形也有所不同。依据棉花、玉米、稻谷、小麦等作物种子的普遍特性将其假设为椭圆柱体[11]。对光电式数种器计数凹槽形状和大小,下种盒的结构与光电计数系统进行创新设计。
2.1 传送带计数凹槽形状的选择
为提高计数凹槽的充种率、单粒计数精度和数种速度,将传送带计数凹槽设计为倾斜形(图2a)和直立形(图2b)两种[12]。直立型计数凹槽打孔简单,方便种子落入。相较而言,倾斜形计数槽采用开口锥形设计,其锥面能够减小种子的滑出阻力,降低种子堵塞,有效减少计数槽的空槽率,降低种子的破损率。因此,本设计传送带计数凹槽选择倾斜型孔槽。
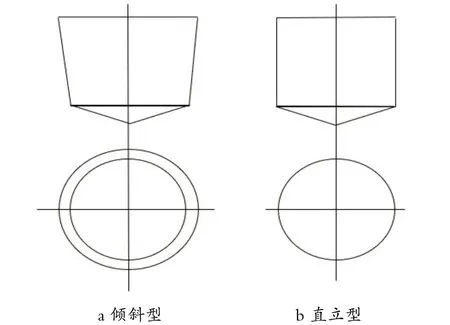
图2 传送带计数槽形状示意图
2.2 传送带计数凹槽尺寸的选择
传送带计数凹槽在于固定种子相对位置和保障种子按粒计数。每条传送带上设置五排计数凹槽,每一排凹槽间的种子在计数时互不影响。根据光电传感器的有效范围,每排计数凹槽间距为100 mm,行距为40 mm。传送带全长为1 400 mm。
用精度为0.01 mm的千分尺测量种子三维尺寸,然后根据三维尺寸求出相应的等效长、宽和高,而部分种子三维尺寸如下(表1):
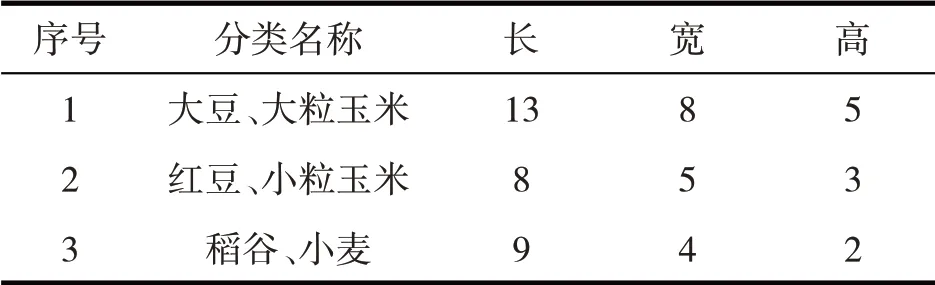
表1 部分种子尺寸模型单位:mm
因此,将传送带计数凹槽的尺寸分类设计为A类(13 mm×8 mm×5 mm)、B类(8 mm×5 mm×3 mm)、C 类(9 mm×4 mm×2 mm)三种不同的传送带,满足对不同品种种子的计数要求。
2.3 下种盒的设计
下种盒(图3)采用双层空腔式设计,上下两层之间用一块钝角三角形挡板隔开。上层承装待数种子,下层设计五个下种口,每个下种口正下方对应一排计数凹槽,既保证了下种速度也保证了每个计数凹槽里面只有一粒种子。

图3 下种盒结构图
2.4 光电计数单元的设计
设计选用光电式传感器[13-15]。工作时,被测变化量转换成光信号,借助光电元件将光信号转换成电信号。光电式数种器选用光电计数单元为E3FDS30P1 漫反射型光电开关[17-19]。开关检测内部装有一个发光器和一个收光器,正常情况下发光器所发出的光无法被收光器捕捉,在物体挡住入射光的传播路径时,入射光就会有一部分被反射回来,收光器收到反射回来的光信号,经过处理后输出一个开关信号,完成一次计数。
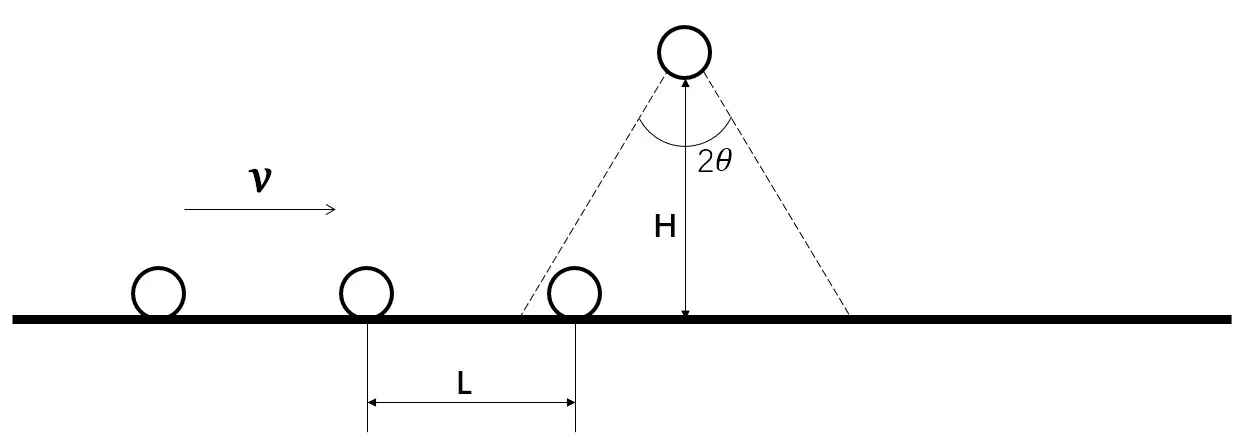
图4 光电计数单元模拟工作图
待数种子经过光电传感器正下方时计数一次,传送带上每一排槽口上方都安装有光电传感器。计数后显示器接收信号并显示计数结果。
光电传感器工作过程简化模型(图4),图中H 为光电传感器距传送带的距离,2为光电传感器的感应范围角,L为每排槽口间距离,v为传送带的行进速度。光电传感器的信号传递速度为光速,响应时间为t0,信号在光电传感器和传送带间的传递时间近似t→0,为保证计数结果的准确性,有:L>H·sinθ+v·t0,H<(L-v·t0)/sinθ,代入 数 据得H<[(100-v)/sinθ]×10-3m(v 的 单 位 为m/s,0≤θ ≤20°),关 系 是H<(820-0.82v),由此计算可知,为保证计数结果的准确性,应保证H和v的正常关系。
3 软件系统
光电式数种器采用STC-89C52单片机控制[20-22],传感器为E3F-DS30P1 漫反射型光电开关,用Keilu-Vision4 语言编写程序[23]。每个光电传感器输出信号,经累加器运算后将最终数字显在显示器上。断电情况前的计数结果保存到单片机内,重新开机后输出到显示器上,误差率保持在较小范围内。
电路(图5)中共有36 V 和5 V 两组电源,36V 电源电压给光电传感器和显示器供电,5 V 电源电压给单片机供电。5 个光电传感器直接与单片机相连,在接收到种子所反射的光信号后,将光的模拟信号变化量转化成电信号变化量通过一个引脚输入到单片机,单片机根据输入信号电压值的大小,换算出输入信号的个数(即种子的数目),每隔0.2 s 输出一个电信号到显示器输入引脚,显示器每收到一个输入电信号就累加一[24-25]。

图5 电路原理图
单片机处理输入信号能有效减小计数结果的误差率,显示器可以直观的读出计数结果,且带有记忆功能,断电时可以自动保存当前计数结果。显示器有清零按键,在计数完成并进行下一次计数时可以直接清零。
4 实验验证
实验分为三组,第一组两名熟练的数种工人在1 m2的方台上利用尺子10 粒种子为一排,1 000 粒为一组进行人工数种。第二组使用网上购买的SLY-C数粒器(自动化操作、无噪音、精度高、大中小粒种子通用型),其工作时使种子形成单粒的种子流,利用单个光电传感器对通过的单粒种子进行计数。第三组采用本文所设计的光电式数种器。将数种五个光电传感器调试在全通状态,待数种子放入到下种盒内,传送带以0.02 m/s的速度匀速运动进行数种作业。
三组均进行1 000 粒种子的计数,通过精确度和数种时间进行对比。为保证种子数目的准确性,每组共有10 人数种工作,每人数100 粒,重复数三遍,每次数出种子数目都为100 粒时将10 人数的种子集合起来用于实验计数。
4.1 实验结果准确性对比
通过实验得出的数据(表2)所示
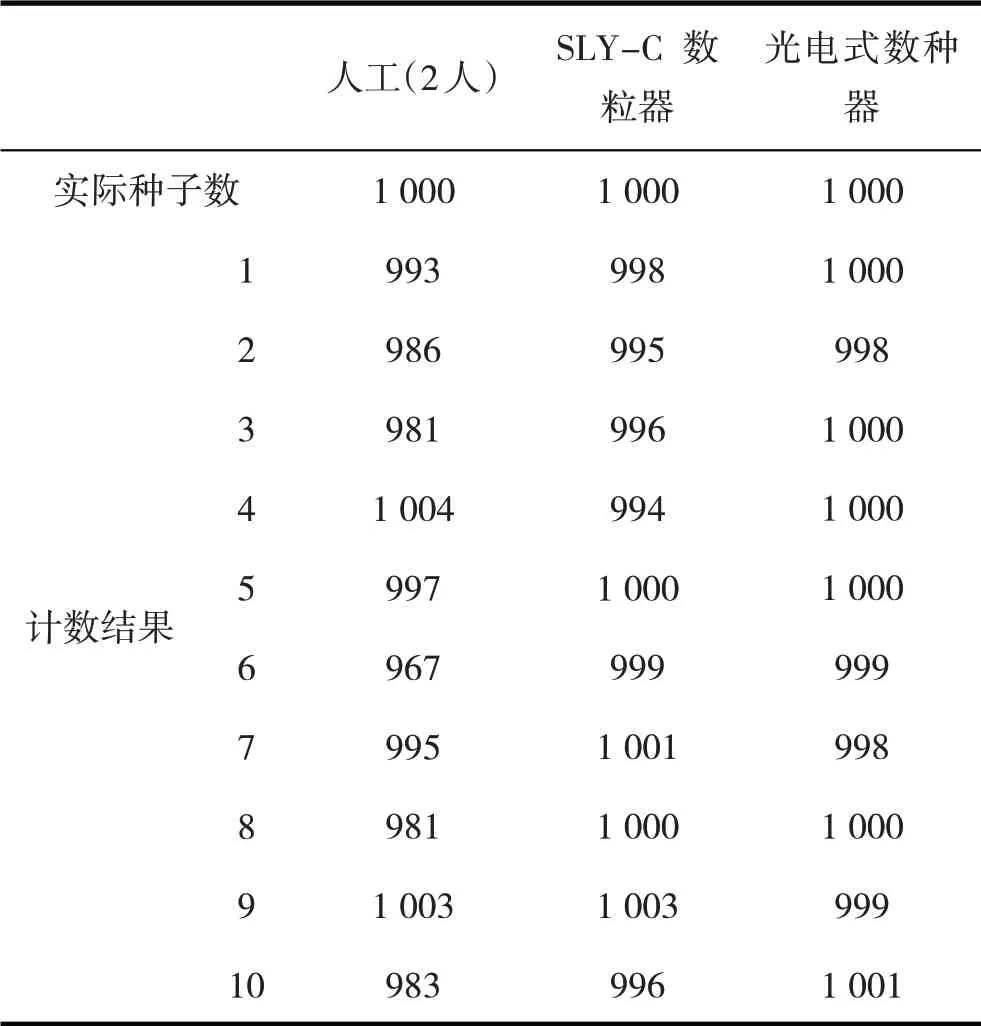
表2 不同数种方式准确性对比 单位:粒

图6 不同数种方式准确性对比图
由图6 可知,传统人工数种的误差率为10%,SLY-C数粒器数种误差率为1.64%,光电式数种器的数种误差率为0.45%。
4.2 实验数种时间对比
通过实验得出的数据(表3)所示
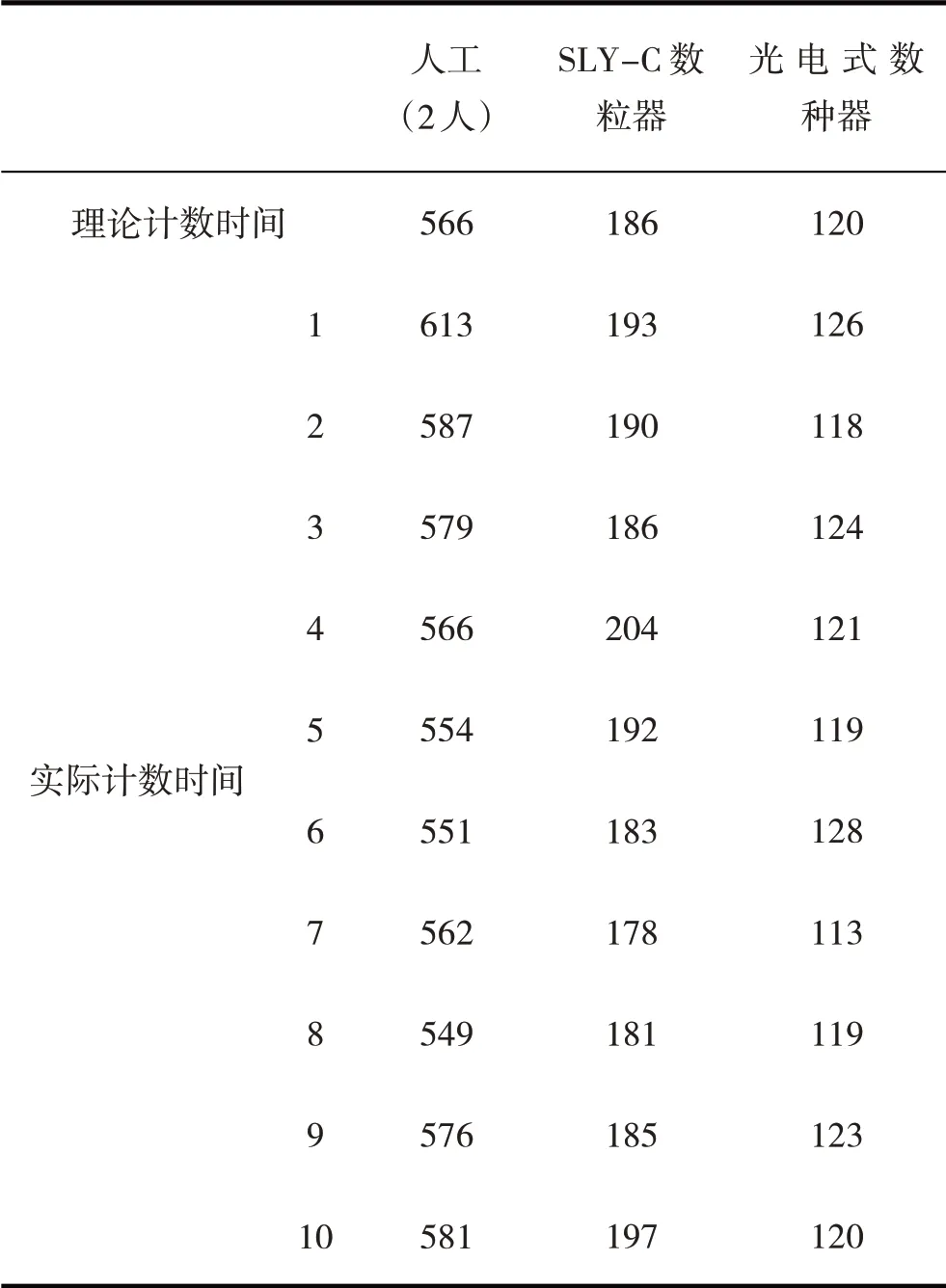
表3 不同数种方式数种时间对比单位:秒
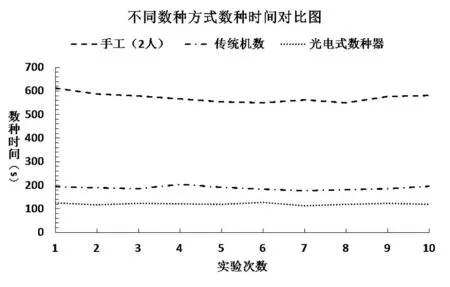
图7 不同数种方式数种时间对比图
由图7 可知,光电式数种器比两个数种工人数种效率高472. 17%,比SLY-C 数粒器数种效率高155.99%。
5 结论
光电式数种器由计数系统、动力系统、收集系统和运送系统组成。利用传送带表面计数槽进行计数,利用光电式传感器和单片机进行控制,实现智能、精准、快速数粒。传送带匀速前进,保证了数种结果的精确性,种子只与传送带和盒体接触,相对运动小,对种子伤害小,保证种子的品质。因此,光电式数种器可以为农作物种子的颗粒计数提供有力的技术支持。
