基于CCD线阵的立靶测量系统精度分析∗
2019-05-07孙晏涛
孙晏涛
(92941部队43分队 葫芦岛 125001)
1 引言
在各类武器的射击试验中,确定弹丸坐标对于武器的研发、定型等有着重要的意义。关于弹丸坐标的测量方法,目前主要有如下几种:靶板法(木靶或网靶)、声学靶、光电坐标靶等。
靶板法是指在预定的测试地点竖立一面木板或网布,射击结束后,人工读取上面留下的弹孔坐标。此方法虽然简单易操作、可靠性高,但是无法实时处理数据,易产生较大的人工误差,并且当射弹数较多时,由于弹孔重叠可能出现漏测。
声学靶利用声敏器材,通过测定超音速弹丸产生的激波到达每个传感器的时间差,采用相应的数学模型反向结算出弹着点坐标。此方法目前仅能对超音速弹丸进行测试,抗干扰能力差,且射频不能过高。大靶面测量时,激波到达声传感器的传播路径更长,易受到各种因素的干扰,从而产生较大的定位误差。
光电坐标靶包括天幕靶和CCD交汇立靶。天幕靶通常由至少4个光幕阵列组合而成,通过测量弹丸穿过光幕阵列的时间反推坐标。此方法的测量精度很高,但存在安装条件严苛、便携性差等问题。
CCD交汇立靶采用2台或以上的CCD相机,其视角在空中交汇而成虚空立靶,弹丸过靶时会留下阴影位置信息,根据该信息即可结算出弹丸过靶坐标。此方法结构简单、测量精度高,目前已被广泛使用,随着CCD相机像素分辨率的提高,其测量精度有望进一步提升。
2 CCD立靶测量系统的组成
系统结构如图1所示。射击时,在弹丸穿过靶面的瞬间,CCD相机捕获到弹丸目标,通过数传系统将目标信号传输至中心站,经过数据处理,实时解算弹着点坐标,并计算出立靶密集度。

图1 CCD立靶测量系统结构图
3 交汇测量原理
如图2所示,两台CCD相机分别固定于A、B两处,采用正交法则布站,即两相机光轴夹角为90°,每台相机相对于基线(即AB连线)的夹角均为45°。
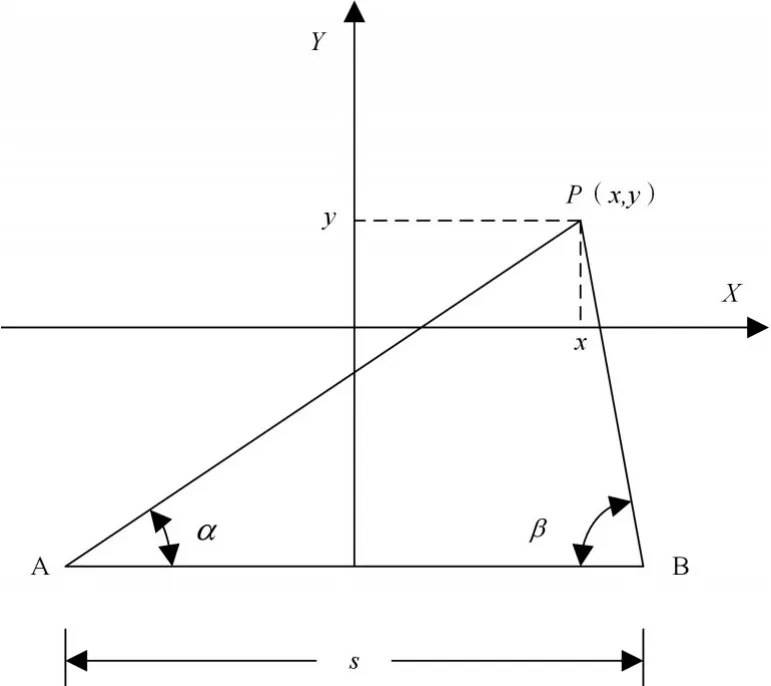
图2 系统测量原理
以两条光轴交点O为坐标原点,水平方向为X轴,垂直方向为Y轴,射向为Z轴。在靶面范围内,任一被测弹着点P相对于A,B的仰角为α、β。γ=180°-α-β ,AB=s。
P点在XOY坐标系中的坐标可由式(1)、(2)给出:
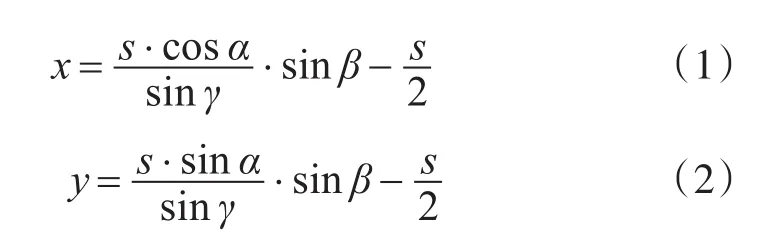
根据式(1)、(2)可知,参数s,α,β,γ都对测量精度产生影响[1],根据误差传播理论[2],可推导出P点坐标的测量误差表达式:
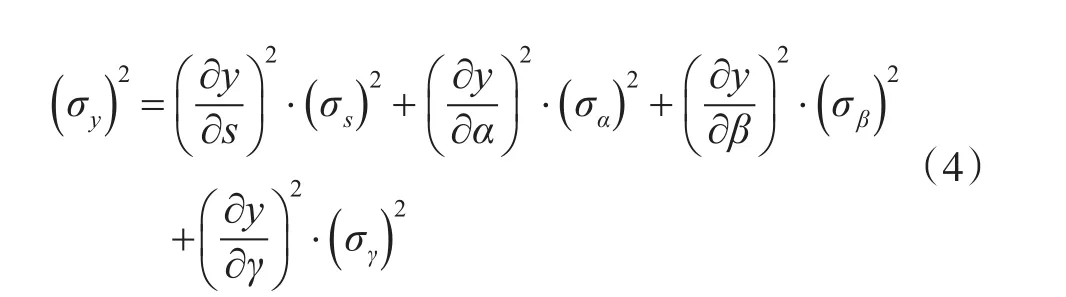
将式(1)、(2)代入式(3)、(4),可得:

4 误差仿真
根据坐标x和y的误差公式进行仿真,仿真流程如图3。
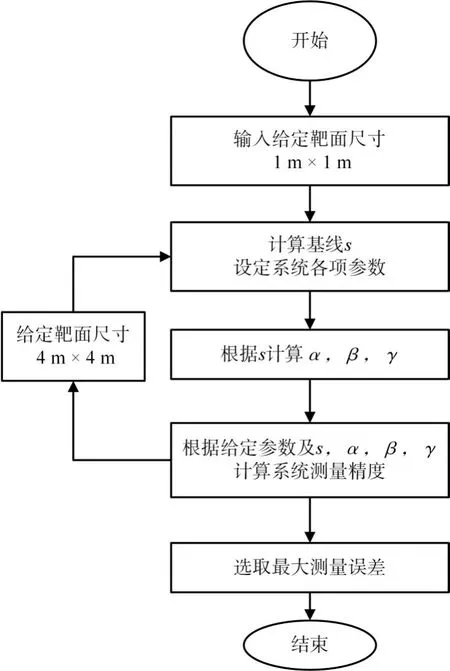
图3 仿真程序流程图
仿真条件如下:
1)靶面长度分别取1m×1m,4m×4m,对应的基线长度分别为2m,8m。
2)基线误差 σs=2mm ,测角误差 σα=σβ=60",σγ=2σα。
得到不同靶面下各点坐标误差分布三维图,如图4所示。
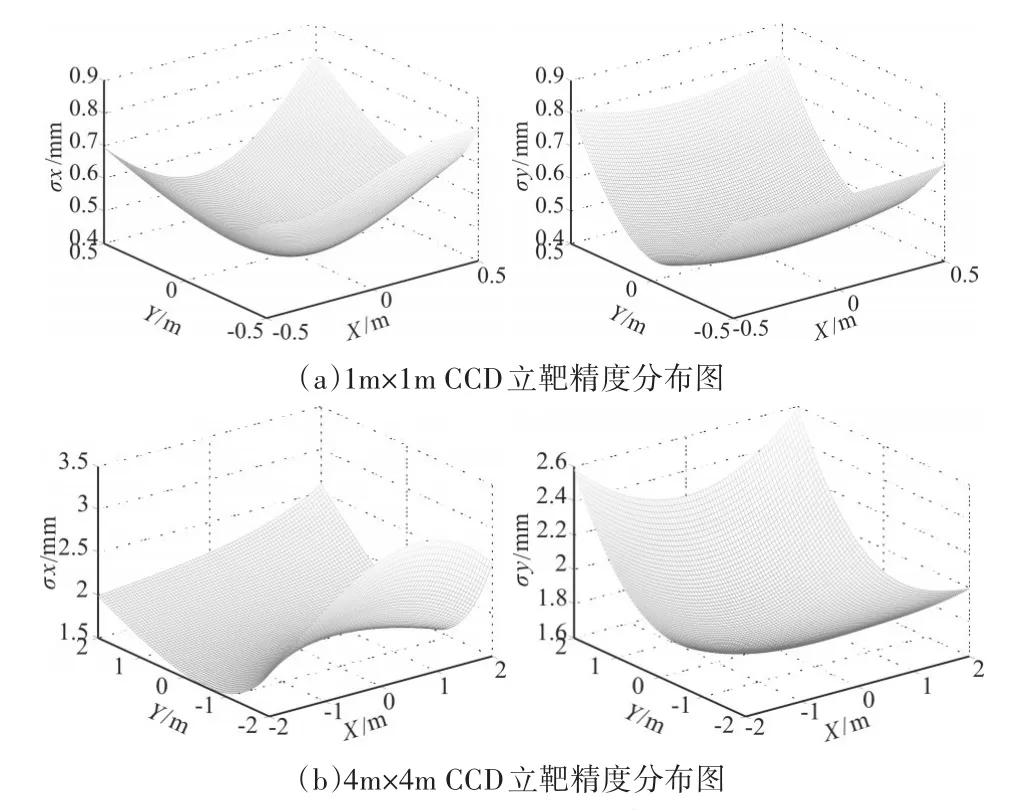
图坐标误差分布图
从图4可以看出:
1m×1m靶面的最大测量误差σxmax1×1=0.9mm,σymax1×1=0.9mm ;
4m×4m靶面的最大测量误差σxmax4×4=3.5mm,σymax4×4=2.6mm 。
5 影响测量精度的主要因素及相应对策
结合误差仿真及工程实践可知,靶面坐标的测量精度与s、α、β、γ这4个参数高度相关(其中γ=180°-α-β),也就是说,误差主要来自于s、α、β 的贡献[3]。
基线测距精度σs主要取决于测距工具的精度,而测角精度σα、σβ由仪器的装调误差及CCD相机读数的量化误差等决定。其中,装调误差由仪器在加工、装配及调试中产生;量化误差与相机的像元数及配置的光学镜头的视场有关。
因此,提高测量精度的措施如下:
1)使用高精度的激光测距仪,提高相机间距s的测量精度;
2)优化仪器的机械结构设计,提高零部件的加工、装配精度;
3)保持光学镜头视场不变,选用像元数更多的线阵CCD相机。
6 结语
本文根据CCD立靶测量系统的工作原理,对系统测量精度进行了理论分析,建立了系统测量精度数学模型,进行了计算机仿真计算,论述了影响测量精度的主要因素,并提出了相应对策。文中所述的提高测量精度的措施,已成功应用于多套CCD立靶测量设备中。本文对于CCD立靶测量系统的进一步研究具有实际参考价值,提供了可供借鉴的方法和经验。CCD立靶测量设备在响应速度、测量精度等方面具有巨大的优势,同时测量原理简单、直观,今后将得到更加广泛的应用。
