无刷直流电机闭环控制器设计∗
2019-05-07邸彩芸
邸彩芸
(1.国网冀北电力有限公司技能培训中心 保定 071051)(2.保定电力职业技术学院 保定 071051)
1 引言
由于无刷直流电机具有响应快速、启动转矩大、调速性能优异,且由于没有普通直流电机的碳刷、滑环等复杂结构因而运行可靠等突出优点,在工业环境得到越来越广泛地运用[1]。但是,目前无刷直流电机的闭环控制器普遍存在PI参数整定不佳,从而导致速度响应从暂态过度到稳态的时间过长,影响控制精度[2],因此本文对无刷直流电机的PI控制参数的优化方法进行了深入研究
文献[3]使用比例积分微分(PID)控制器的实现对无刷直流电机的闭环控制。文献[4]在DSP中实现了BLDC控制系统。该控制系统使用了DSP的串行通信接口(SCI)模块与上位机的RS232模块进行通信获取控制指令,而BLDC电机的速度和位置反馈信息由正交编码器获得。根据上述信息可以在DSP设备中计算PID控制命令,然后由DSP的驱动板产生脉宽调制(PWM)控制命令。根据文献[2]中的实验结果,所提出的PID控制设计在瞬态和稳态响应中表现出良好的性能。针对当在实际控制系统中输出响应过长的问题,文献[3]使用了一种神经网络预测控制设计来限制长延迟条件的影响并改善电机控制系统的时间响应。
近年来,应用于电机控制平台的优化方法在许多研究工作中得到了广泛的应用。文献[4]使用基于遗传算法(GA)的PID方法来控制电动助力转向系统中的无刷直流电机。根据文献[4]的实验结果,基于遗传算法的闭环PID控制设计能够实现最优PID参数,比标准闭环PID控制设计具有更好的能耗。
基于上述研究成果,本文在对无刷直流电机的参数进行识别的基础上,提出一种基于遗传算法的PI控制参数优化的方法。该方法使用遗传算法对不同延时系数下的比例、积分值进行迭代寻优。通过实验表明,该方法所设计的PI控制器的速度响应明显优于传统方法整定的PI控制器。
2 无刷直流电机的参数识别
为了在没有工厂技术规范的情况下,在系统建模中找到一个无刷直流电机模型,本研究采用一种简单的方法来获得BLDC电机的适合度模型。首先收集在开环控制模式下由DSP随机生成的PWM输入控制电压命令时的输出速度信息。然后,利用Matlab提供的系统辨识工具箱,从输入数据和输出数据中获得无刷直流电机系统模型[5~7]。工具箱中的用户界面如图1所示。

图1 系统识别工具箱
该工具箱用于以传递函数形式构建BLDC电机的模型。输入训练集由伪随机电压值在2~6的范围内生成,变化速率为10Hz。输出训练集是通过输入命令从实际电机速度信息中测量的。用作工具箱的原始数据如图2所示。
从工具箱中选择了带有极点和延迟的传递函数模型方法。时间延迟通过使用Padé逼近方法获得[8-10]。根据本研究中的标准模型拟合结果,在估计方法的连续时间模式中,极点数设为2,零点数设为0。在传递函数G(s)中得到估计模型如下:

为了检查系统识别处理的性能,使用四个电压条件作为输入命令:2V、3V、4V和5V。表1列出了实际BLDC电机和识别模型之间的稳态误差每分钟转数(RPM)值。G(s)和真实无刷直流电机模型的开环响应如图3所示。
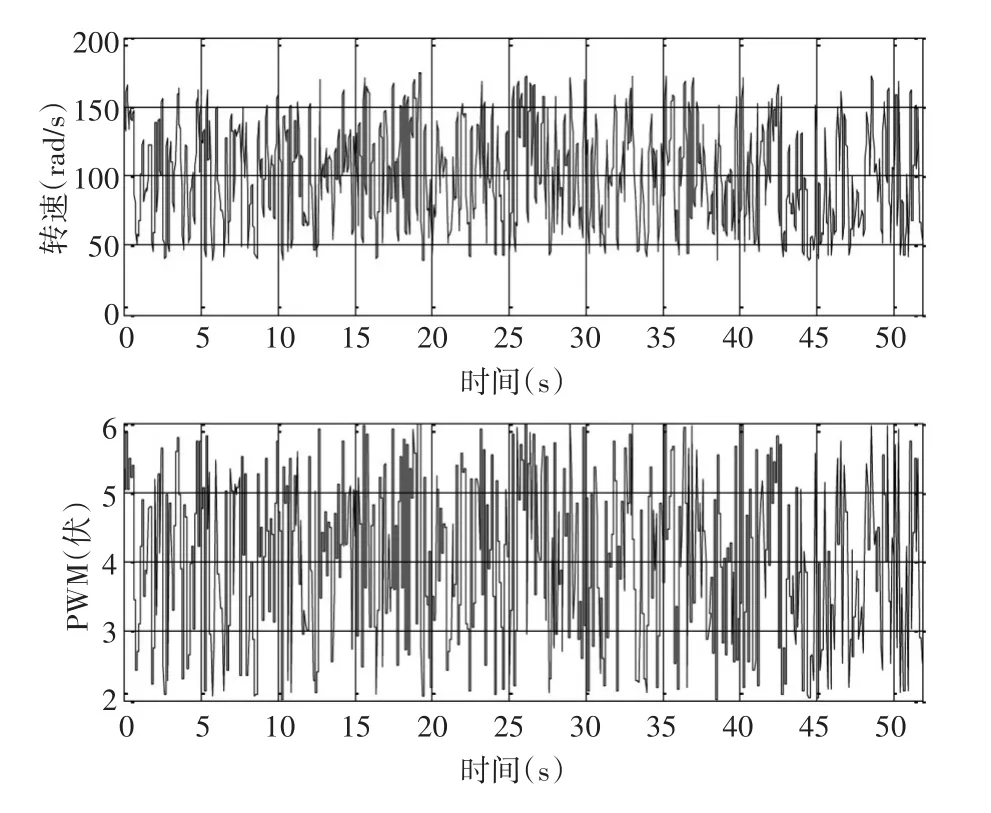
图2 无刷直流电机的输入输出响应

表1 实际无刷直流电机和识别模型之间的稳态误差

图3 无刷直流电机模型的开环响应
在图3中,来自实际BLDC电机的时间响应被绘制为蓝色线,并且来自系统识别工具箱的时间响应被绘制为红色线。根据系统辨识方法中的名义模型拟合结果,电机模型的稳态速度为接近1000 RPM。
3 参数空间中的GA-PI控制设计
无刷直流电机PI控制设计框图如图4所示[11~12]。

图4 具有时间延迟的无刷直流电机闭环PI速度控制
3.1 遗传算法(GA)
GA的主流程图如图5所示[13]。
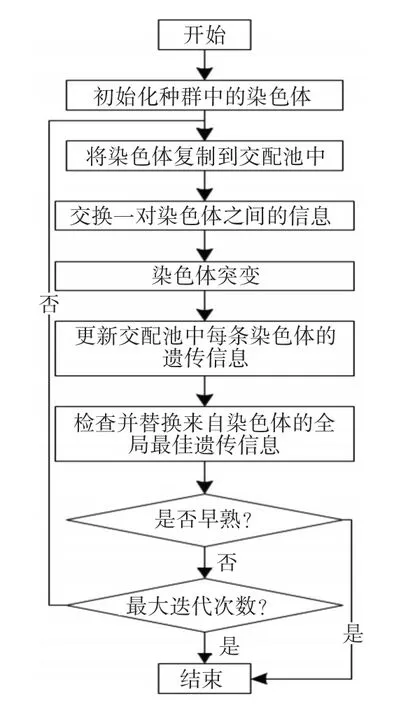
图5 遗传算法的过程概述
在GA的过程中,GA的总体是随机初始化的[14~15]。种群大小为10,每个染色体中的遗传信息长度为1000。轮盘选择方案用于选择染色体并将其复制到交配池中;交叉比率为0.5。交叉比率为0.25。
在本文的研究中,基于均方误差(MSE)微分值的提前停止技术被用来避免训练结果的过度拟合[16~17]。这个值是通过在每个训练阶段减去当前MSE值来计算的。如果获得的值是肯定的,则训练处理继续。如果MSE值在10次迭代中为负,则通过提前停止方法停止训练过程。训练过程停止后的时间数为10。
3.2 比例积分控制器
从文献[1]中引用的PI控制器的主要方程C(s)如下:
这里,kp是比例增益,而kι̇是积分增益。
3.3 基于GA的延时PI控制设计
为了找到不同时间延迟条件下的最优PI控制参数,在本研究中使用GA。为了提高训练质量,每个遗传信息的价值应该是有限的。在0时,三维稳定性参数区域中定义的增益极限条件,对于具有时间延迟的PI控制参数,如图6所示。
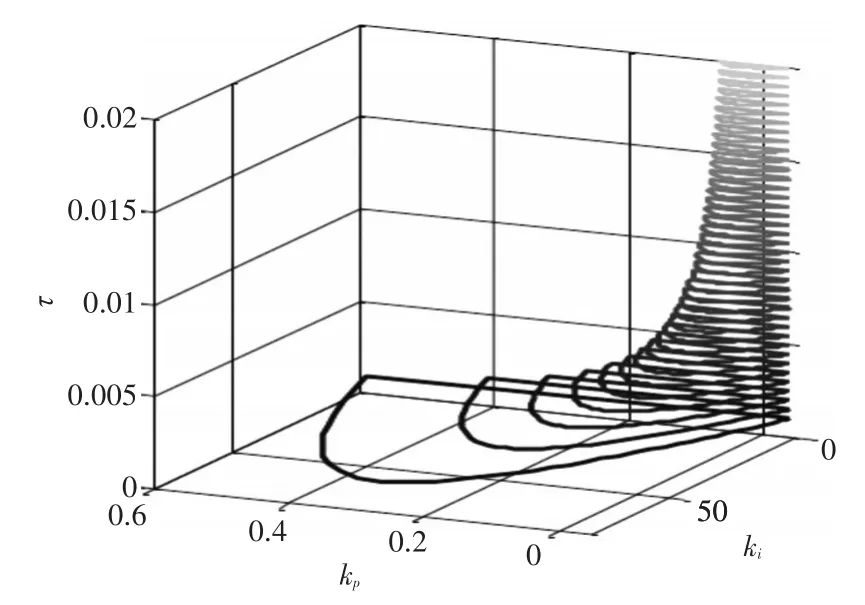
图6 三维稳定区域
图6显示了时间延迟τ值在0s~0.02s范围内的PI稳定区域。当面积因时间延迟而变小时。每个区域的范围用于获得GA群体中每个染色体值的下限和上限。通过使用这种方法获得了图7中由红色曲线表示的每个时间延迟条件的最佳值。

图7 不同方法的适应度曲线
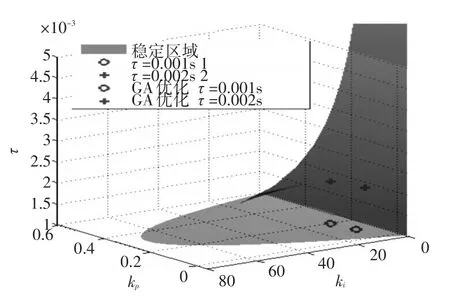
图8 已知τ的PI控制器测试点
为了比较PI控制器和基于GA的PI控制器的控制性能,测试点绘制在图8中,模拟结果如图9所示。标准PI控制增益的参数在不同时间条件下是固定的,并且使用基于GA的PI方法计算零值时间延迟的值。

图9 已知τ的Gs的时间响应
在图9中,PI的时间响应由蓝线表示,而基于GA的PI由红线表示。基于GA的PI控制设计的瞬态响应优于PI控制设计,适用于不同的时间延迟条件。在延时条件为0.004s时,PI控制增益超出稳定区域,时间响应不稳定。与PI方法相比,相同延时条件下的基于遗传算法的PI方法具有良好的性能。对于时间延迟值分别为0.001s,0.002s和0.003s的稳定条件,基于GA的PI控制设计的时间响应优于PI控制设计在不同时间延迟条件下的响应。表2列出了从模拟中获得的详细的IAE值。

表2 在模拟中已知的基于PI和GA的PI方法的IAE值
4 实验验证
4.1 实验平台
为了验证DSP的无刷直流电机闭环控制系统算法。采用由德州仪器设计的Code Composer Studio(CCS)用于本研究。CCS的用户界面如图10所示。

图10 CCS v3.3的用户界面
本研究中使用集成开发环境(IDE)编程C语言代码。IDE包含以下模块:编译器,汇编器和链接器。编程成功完成后,会创建“*.out”文件。这个文件然后被加载到DSP板的闪存中。最后,DSP的BLDC电机正常工作。
该平台用于通过使用DSP来控制BLDC电机。在这项研究中,DSP可以由IDE编程。该平台如图11所示,使用以下硬件。
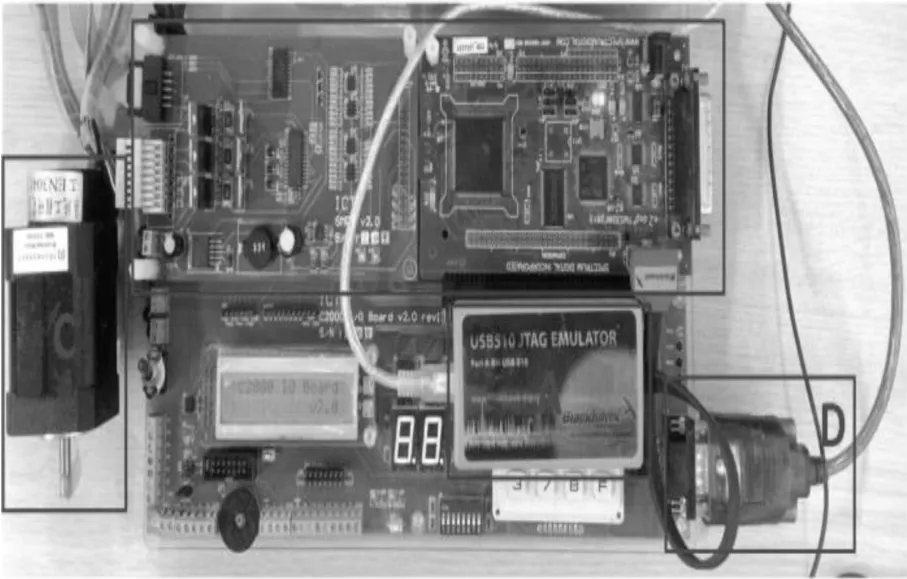
图11 基于DSP的无刷直流电机控制平台
1)JTAG调试仿真器
实时联合测试行动小组(JTAG)调试电缆。型号名称是由Blackhawk Inc.制造的BH-USB-510。
2)DSP主板
该板由Spectrum Digital Inc.制造。型号名称为TMS320F2812 DSP的eZdsp™2812,如图11右侧所示。功率模块和绝缘栅双极晶体管(IGBT)显示在图11的左侧。在执行DSP系统中的事件管理器(EV)之后,EV模块生成6个PWM输出。然后,IGBT模块由PWM电路驱动。最后,BLDC电机由IGBT模块驱动。
3)无刷直流电机
电机型号是MBE.172.E500,连接到DSP主板上的运动控制板。在本文研究中,通过安装在电机后部的光学编码器获得无刷直流电机的速度反馈信息。嵌入在DSP芯片中的正交编码器脉冲(QEP)模块可以检测旋转编码器输出的A通道和B通道脉冲,其分辨率为每转500个脉冲。
4)RS232接口
目标速度控制命令和基于GA的PI控制增益从个人计算机上的用户界面(UI)发送到串行端口(RS232),然后发送到DSP控制系统。实时速度信息可以通过电机在UI上的时间响应(如图12所示)从串口获得。
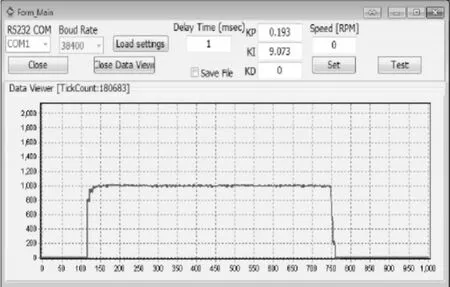
图12 基于DSP的BLDC电机PI控制用户界面
4.2 实验结果
为了评估基于GA的PI方法相对于标准PI方法的性能改善,从所提出的方法获得的控制参数被用于控制BLDC电机。目标速度命令是1000 RPM,每个条件下的时间延迟是不同的。

图13 来自已知τ的实验平台的时间响应性能
线性间隔矢量中的元素的时间延迟值在0s~0.004s的范围内。矢量的选定值之间的间隔为0.001。基于GA的PI控制设计方法在基于DSP的控制平台上实现。实验结果如图13所示。在该图中,使用PI方法获得的结果由蓝线表示,基于GA的PI方法的结果由红线表示。
从图13可以推断,所提出的方法可以在不同的时间延迟下从GA中获得最优PI参数。该方法在时间响应方面的性能优于PI方法。表2显示了从实验中获得的详细的IAE值。

表2 在实验中已知的基于PI和GA的PI方法的IAE值
比较模拟和实验结果之间的IAE值,我们推测所提出的方法比PI方法具有更好的瞬态响应。
5 结语
本文阐述了基于遗传算法实现对PI控制器的参数整定的方法。首先,利用Matlab中的系统辨识工具箱,在传递函数形式中建立无刷直流电机的控制模型。然后,利用Matlab中的适应度模型,该方法找到了不同延时条件下的最优PI控制参数。随后,PI控制参数被输入到DSP平台。最后,我们获得了BLDC电机的时间响应,该电机使用DSP平台中的驱动板进行操作。实验结果表明,使用所提出的控制设计获得的暂态响应优于传统方法整定的PI控制器。
