基于机器人装配生产线的结构与离散事件建模研究
2019-04-30陈玲琳
陈玲琳
(安徽工业经济职业技术学院 机械与汽车工程学院,安徽 合肥 230051)
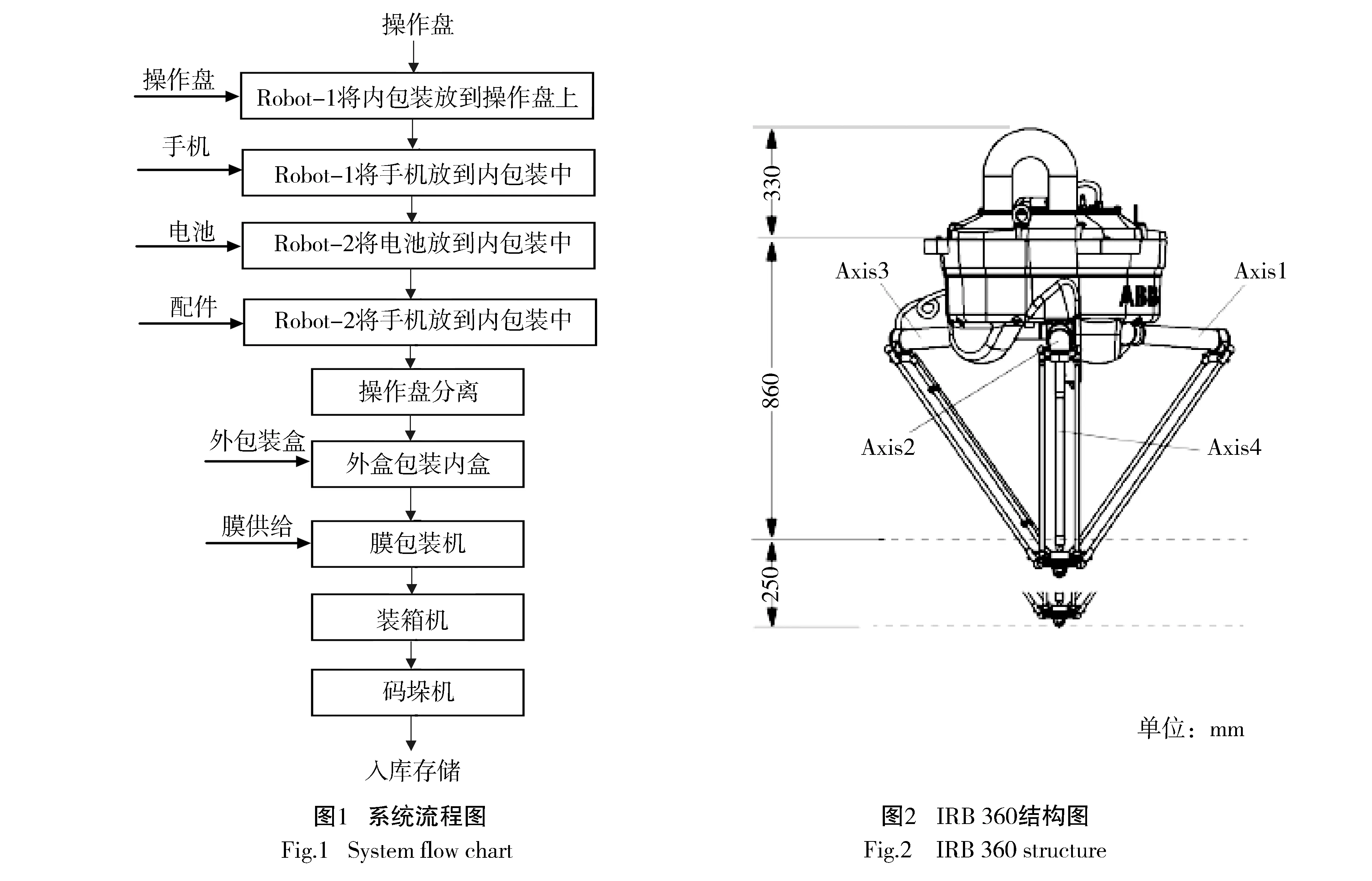
1 装配流程图
本文以某手机包装生产线为研究对象,先确定装配对象类型,再根据老式生产线的工艺流程,对其流程进行分析,并计算出所需物理元件的个数,然后构建出能够用于实际生产的系统方案。最后用数字化工厂软件验证设计方案的有效性。具体工序的描述如表1所示,流程图如图1所示。

表1 手机包装流水线工序详述Table 1 Mobile packaging pipeline process details
2 流水线结构
2.1 Robot
ABB IRB 360 Flexpicker 四轴工业机器人,专门用于高速捡取及放置任务,经模块化设计,具有 0.1 mm 的重复定位精度,且负载高、节拍时间短、运动性能强,其组成结构如图 2所示。
从表2中IRB 360机器人的性能指标可知,机器人可在短时间内实现货物捡取及放置的一次往返路径,同时节拍时间不会随着负重增加而提高,且能够高速行进。
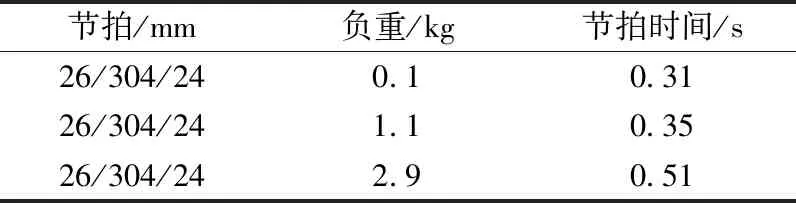
表2 Robot指标数据Table 2 Robot indicator data
本文使用的 ABB 公司的 IRC5 控制器,具备动态建模技术,可以自动优化机器人性能,并采用 TrueMoveTM、QuickMoveTM技术来增加精度、减少节拍时间。而且IRC5的传感器接口、远程接口等均可编程,其 I/O 接口可兼容大部分工业网络,具备良好的联网能力。
2.2 传送系统
输送机可实现大批货物在某区间内的快速移动,可有效节约人力,在传送更多货物的同时,实现更少的人力和空间占用,是自动化仓储中不可或缺的部分,在包装生产中广泛应用。根据行业的不同,传送系统的种类也不同,这些都可以从3D Create组件库中找到如图3所示。
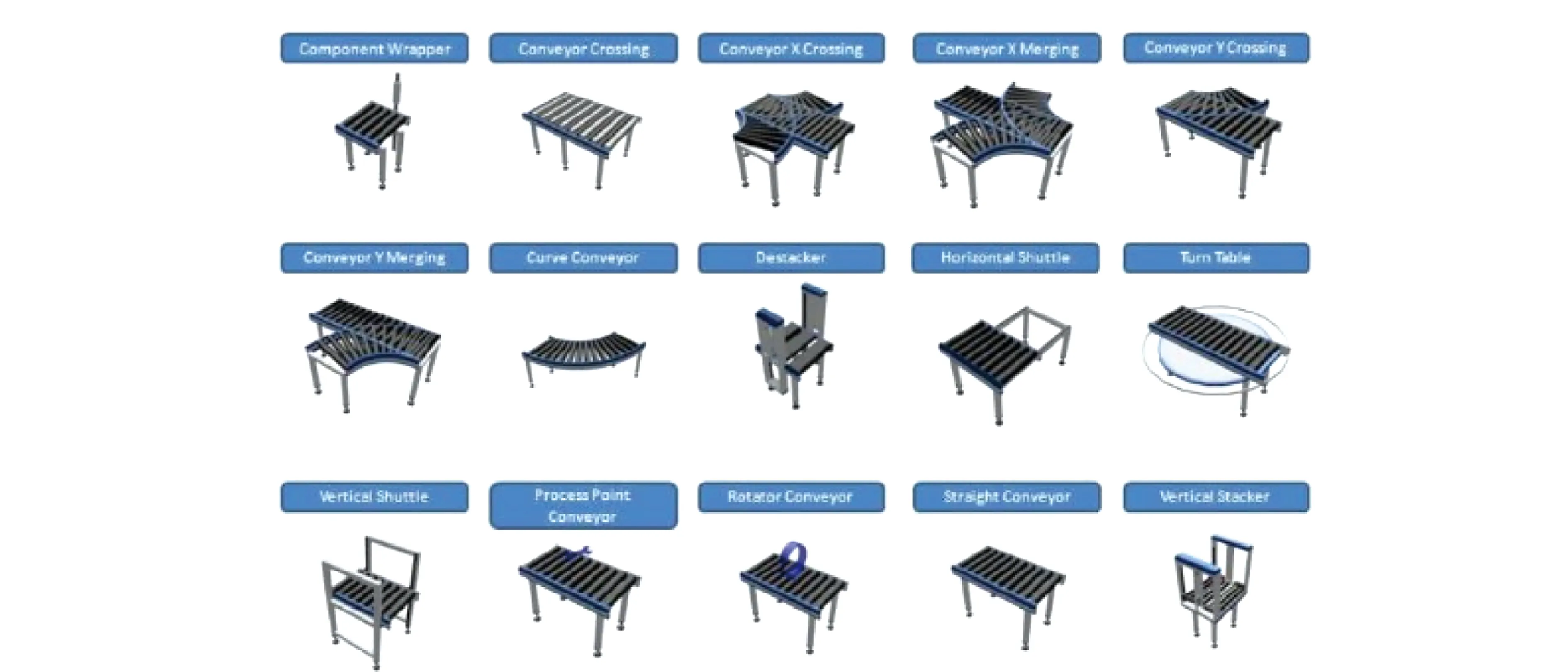
图3 3D Create中的各类输送机Fig.3 Various conveyors in 3D Create
2.3 自动化仓储
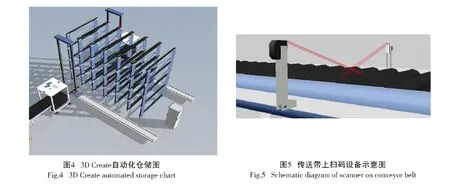
自动化仓储模块主要包含:立体货架、出入库操作台、堆垛起重设备和自动控制系统。它可以将货物传入仓库的同时,对仓储情况进行数字化仿真分析。图4是3D Create的自动化仓储模拟图,并通过条码识别和计算机控制实现货物的归类。
自动化仓储模块包含:存储仓库部分、货物传输系统、控制及管理模块。针对现实操作中不同类型货物的不同属性,自动化仓储系统也有不同的分类。
自动化仓储模块还有很多优势,比如节约占地资源、高效管理和运作以及具有很高的安全性。
2.4 扫码设备
条形码扫描技术能方便地采集产品信息,实现对产品的实时监控,被越来越多地用于仓储系统[1]。自动分拣系统、AGV等先进物料处理技术,在扫码技术的加持下,失误率更低,生产效率得以提升。在本自动化仓储系统中,扫码设备被安装在传送带两侧,可以边运送产品边进行扫描(图5),从而实时掌握库存情况及物料存储位置信息,对仓储的出入库进行动态管理[2]。
3 离散事件系统仿真
3.1 离散事件系统的研究
在对生产系统的分析研究及改进设计工作中,最普遍应用的方法就是离散事件仿真。其组成有实体、属性、活动、事件、进程等多种要素,用户可以通过离散事件仿真试验各种不同的条件,以此来优化工作流程[3]。
1)实体是指系统的设备构成,例如传送带、机械设备及物料等。
2)属性是指实体所具备的状态、参数等特性,如手机包装中包装盒的外观、尺寸、选材、耗时等是手机外盒的属性。
3)活动是指系统变化的历程,指示体系状况的改变。活动的停止可引起其它事件产生,并且活动本身也是由另一个事件引起的。
4)事件是指致使系统产生变化的行为,只有通过事件的作用,才能导致系统的状态改变。
5)进程包括了跟实体有关的各种活动及事件,表达了它们的时序和相互逻辑。
3.2 离散事件系统仿真
离散事件系统仿真操作包括:
1)任务解读。首先要掌握流水线的大体情况,了解为什么要仿真及仿真模型结果的参数,如系统的工作时间、装置的使用率等等。
2)仿真实验设计。全面深入地掌握系统基本情况,同时对系统的结构组成、相关数据等各种情况进行描述。
3)获取数据。依据周边环境,获取所需的完整数据,并执行分析及比对。
4)制作仿真模型。根据周边现实环境,制作仿真模型,再经反复检验及完善后构建完成。
5)实现模型的编程。可以使用C++、Python等通用的编程语言,也可以通过Witness、Simula 等仿真语言。
6)仿真实验。首先指定时间范围,在时间范围内实验操作,得到所需的结果信息。
7)结果分析。分析得结果数据,统计并研究各项性能参数,并比对预估目标、研究可行性。
4 流水线的Petri网建模
4.1 基本Petri网的介绍
满足下面四个条件的PN=(P,T,I,O;F)叫做有向网:
(3)F⊆(P×T)∪(T×S),(“×”为笛卡尔积运算);
(4)dom(F)∪cod(F)=P∪T;
其中dom(F)和cod(F)分别为F的定义域和值域;
dom(F)={x∈P∪T∣∃y∈P∪T:(x,y)∈F};
cod(F)={x∈P∪T∣∃y∈P∪T:(y,x)∈F};
P={p1,…,pn}是库所的有限集,n>0为库所的个数;
T={t1,…,tn}为变迁的有限集,m>0是变迁的数量;
输入I:P×T→N,是指由P至T的权的集合,其中非负整数集N={0,1,…};I可以描述为:
(1)
输出函数O:T×P→N,表示从变迁 T 到库所 P 的权的集合,O可以描述为:
(2)
关联矩阵 C 是用来描述 Petri 网的动态行为,可以描述为:
(3)
离散事件系统建模普遍使用Petri 网对流水线建模,以此来全面解完整的的生产流程,并利用 Petri 网模型来分析系统的有效性、安全性等性能。
4.2 Petri网建模步骤
Petri网建模方式为[4]:
1)以建模为目标,找出Robot、包装及装箱设备、码垛机等物理单元。再找出系统的过程元素。
2)通过 Petri 网中的T、P及流关系来表示资源同过程间的关系,变迁表示系统中全部的活动、库所表示系统中全部的状态、流关系描述活动和状态间的约束。
3)利用 Petri 网模型,依据不同工序及托肯数目的改变,得到相关函数及关联矩阵,然后利用关联矩阵对流水线的工艺进行研究。只要不影响结果,在进行Petri网建模前,假定有下列条件:
一是流水线工作中零故障,生产顺利;二是生产过程中材料供给流畅;三是仅输入主要工作站的任务时间,不考其他因素。
以上面假设条件为前提,构建该生产线的Petri 网模型,其具体流程如图 6 所示。

图6 生产线的 Petri 网模型Fig.6 Petri net model of production line
本流水线中,库所P的集合代表流水线上全部装置的状态,变迁T的集合代表系统运行中导致待处理件改变的操作,如表3所示。

表3 Petri 网模型P同T的对照Table 3 Comparison of petri net model P and T
4.3 对流水线的评估
本文对该流水线系统 Petri 网模型的分析方法,选用了基于不变量分析的数学分析法,首先利用Petri网得到相关函数及关联矩阵,然后根据解线性方程解的个数进行性能判断,以此来判断可行性。
状态方程为:
M=M0+CY......................
(4)
M=[m1,m2,…,mn]T...........
(5)
其中M0是最初各P的token数,M是经T后,P的token数。
假如系统经过T后,又回到原始状态,即
M=M0+CY.......................
(6)
那么Y就称为T的不变量,即
CY=0.................
(7)

(8)
利用 Petri 网的模型,获得的输出函数(9)式所示:
(9)
通过方程CY = 0,得到 Y,就能够有该流水线模型T不变量,求解出关联矩阵 C 的秩,利用数学软件求得rank(C)=16,由于变迁数量是17(列数),因此CY= 0有无穷个解,且有非0解。据此,能够分析出具有T不变量,证明其可达、有界、活性。可达性是指该流水线能够依据规则连续运行,而且可以经历原始状态→变迁→目标状态→原始状态的循环;有界性是指该流水线的布局设计合理,在工作过程中不会发生资源溢出;活性是指工艺流程合理,在工作过程中不会出现死锁情况,能确保流水线的顺畅运行。
4.4 Petri 网的工艺流程转 3D Creat
利用 Petri 网构建流水线的工艺模型后,通过面向对象的研究方法,在仿真软件中把 Petri 网中生产过程全部的库所、变迁转为相关的物理元件和指标,详细的转换步骤有:
1)流水线上的物料能够利用3D Create仿真软件中的Feeder组件库生成。将Feeder的供料参数定为无限,确保足额添料。
2)利用3D Create创建2个Robot,并设定其计划日志及轨迹。
3)在模型库中创建有码垛机、控制器、货架、入库台、出库台等自动仓储系统的组成元件,再通过PNP与其连接,制定Controller的各项参数。
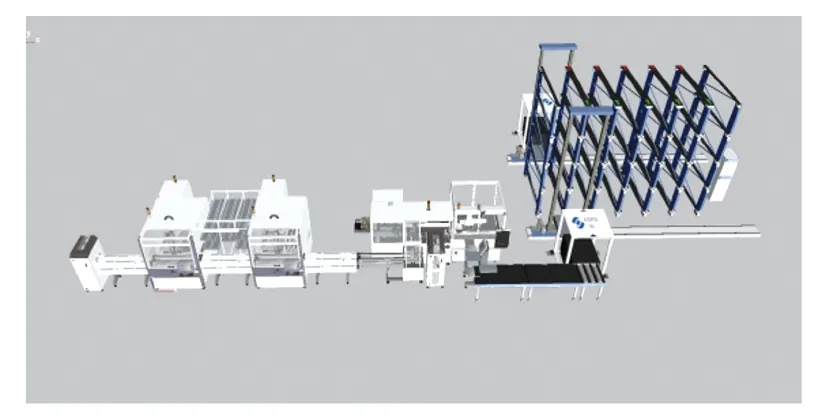
图7 手机包装机器人流水线布局图Fig.7 Pipeline layout of mobile packaging robot
4)最后的工序由包装模块执行,通过cp240组件生成并制定有关参数。
5)传送带可通过Conveyor组件生成,并设定长度、形状、速度、加速度等参数。
6)利用模型库的设备控件实现各类变迁的出发条件。
根据上述步骤,绘制出的生产线布局如图7所示。
5 结论
1)分析了某手机机器人包装流水线的工艺流程,整个流水线系统完全基于自动化设计。由于不同种类的手机在生产线上的装配流程基本相同,所以该包装流水线的结构也可应用于同类产品。
2)装配生产线属于典型的离散事件系统,研究离散事件系统,然后利用Petri 网对流水线建模,采用不变量分析法研究系统工艺,进而评估该系统的合理性。
3)Petri网的工艺流程转 3D Create对应的装配工艺,构建了流水线的总体布局方案。
