海面舰船目标雷达距离高分辨特性测量
2019-04-29祝明波孙铭浩丁向荣
祝明波,孙铭浩,丁向荣
(海军航空大学,山东烟台264001)
雷达距离高分辨特性,即目标的一维高分辨距离像(HRRP)特性,是目标散射体在每个距离单元中回波的相干和,代表了目标散射中心在雷达视线(LOS)上复杂回波信号的投影[1],能够体现目标的形状及结构信息。因其易于获取,同时能够对目标准确识别,已成为目前雷达目标识别领域的一个重要研究方向[2]。距离高分辨雷达的发射信号具有很大的时宽带宽积,其距离分辨力可达亚米级,一般目标的回波分布在不同的径向距离单元,呈现为“一维距离像”,形成了“距离拓展目标”[3]。作为现代雷达系统的重要研究方向与未来侦察系统的一个关键组成,加强对距离高分辨率下的目标特性的测量与分析,对目标识别具有极其重要的军事应用价值。为提高反舰导弹对舰船目标的精确打击性能,利用距离高分辨雷达导引头对舰船目标进行探测与识别,已成为反舰导弹探测制导技术发展的重要方向。通过分析舰船目标距离高分辨特性,可为新体制末制导雷达有效进行目标检测与识别提供理论基础。
国内研究机构经过20多年的不断研究与实践,使得基于HRRP的雷达目标测量与识别得到了长足的发展,并在此基础上提出了很多识别新方法,但目前大部分研究都是基于仿真模型开展,很少基于实测舰船或飞机数据开展。西安电子科技大学的邢孟道[4]、电子科技大学的周云[5]等,运用飞机的实测数据研究了距离高分辨下目标特性与识别。中国航空工业集团雷华电子技术研究所曾开展了海面目标识别技术的研究[6],但其中也仅从理论方面提出一维距离像的优势与可行性;海军工程大学的张家昌[7]、国防科技大学的李为民[8]利用建模仿真方法获得舰船目标的HRRP进行研究。由此可见,国内较为缺乏对于海面舰船目标距离高分辨特性数据的实际测量与分析。
本文利用实验室现有全相参新体制导引头目标测量平台,对海面舰船目标的距离高分辨特性进行了实际测量,并通过脉冲压缩处理得到其米级高分辨距离像。首先,介绍了测量背景与意义;接着,介绍了测量平台的组成与性能指标;之后,简要介绍了测量过程;最后,展示了实测得到的舰船目标的一维距离像。
1 测量平台
测量平台采用先进的全相参脉冲压缩体制,主要由系统硬件和软件组成。
1.1 平台硬件
主要由天线、全相参收发系统和主控计算机(内嵌数据采集模块)组成,见图1。其中,接收分系统采用正交解调方案设计。

图1 测量平台硬件组成框图Fig.1 Diagram of platform structure
1.2 平台软件
操作系统为Windows XP 64bit。开发软件主要是Microsoft Visual Studio 2010与Matlab 2014。Microsoft Visual Studio 2010是美国微软公司的开发工具包系列产品,实验中用于测量与控制程序的开发及运行。通过编程,建立包含参数设置的平台控制界面如图2所示,用以完成平台校准与数据采集。Matlab 2014是美国MathWorks公司出品的商业数学软件,实验中利用该软件完成脉冲压缩程序开发与运行。通过编程对回波进行匹配滤波获得目标一维距离像。
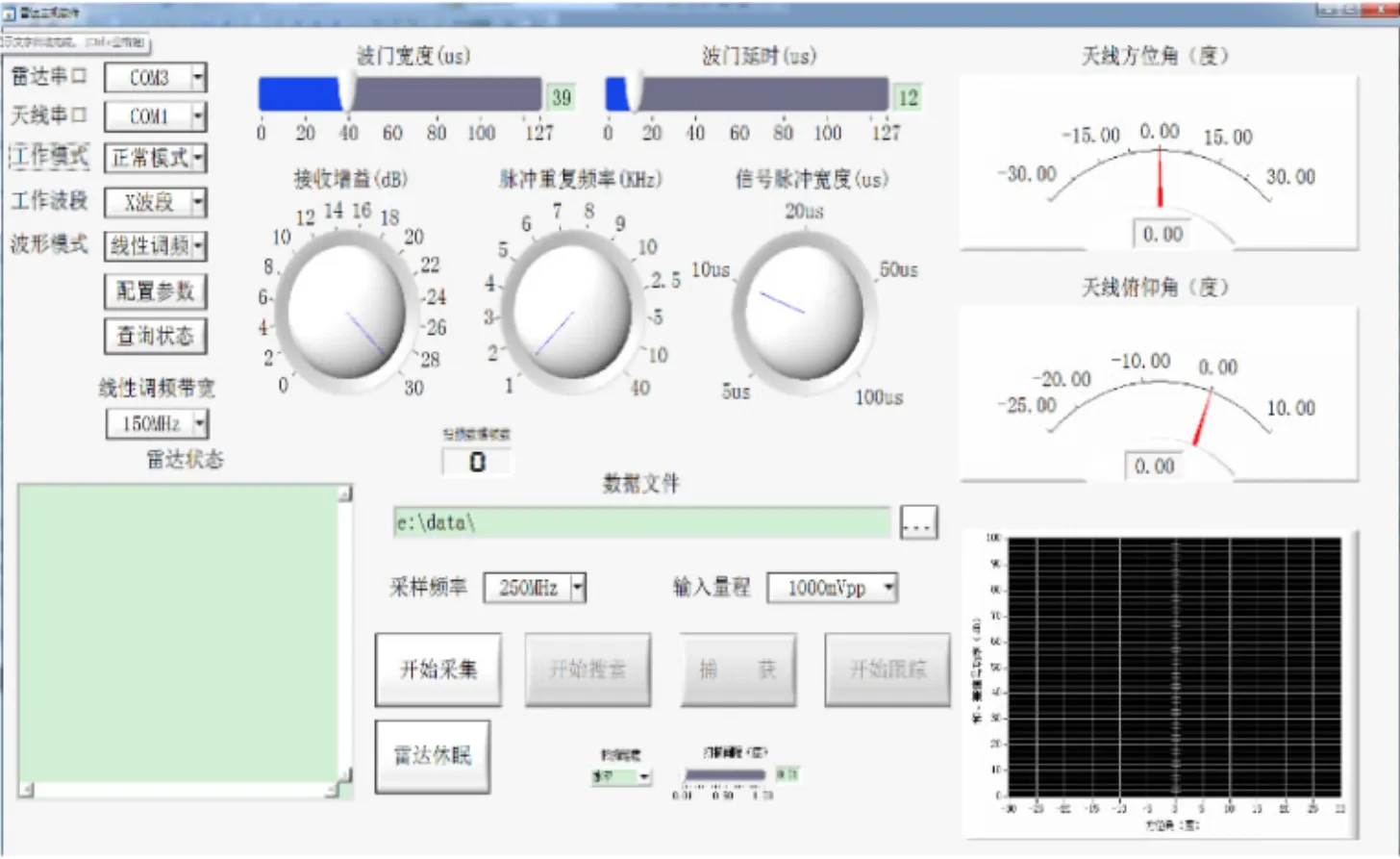
图2 平台控制界面Fig.2 Platform control interface
1.3 主要性能指标
波门宽度:0~127μs;波门延时:0~127μs;增益控制:0~30dB;脉冲重复频率:1~10 kHz(步长1 kHz)、2.5 kHz、40 kHz等12档;采样频率:150 MHz、200 MHz、250 MHz;信号脉冲宽度:5μs、10μs、20μs、50μs、100μs;线性调频带宽:15 MHz、30 MHz、50 MHz、150 MHz。
2 测量过程
本文完成了对同一舰船不同姿态、相同姿态不同舰船2种情况下距离分辨率为1 m的回波数据采集与处理。测量过程如下:
1)天线对准。将天线电轴对准目标舰船。
2)参数设置。在平台控制界面设置测量参数,如表1所示。

表1 测量参数Tab.1 Measurement parameters
3)系统校准。在平台控制界面将工作模式选为“校准状态”,录取相应校准信号数据,用于对系统宽带误差进行补偿。同时,用作后续脉冲压缩处理的参考。
4)回波采集。将工作模式选择到“正常模式”。录取对海实测回波数据。
5)脉冲压缩。在Matlab中启动脉冲压缩程序,进行脉冲压缩处理,保存有关结果。
6)图像提取。将基底噪声电平(-15dB)设置为提取门限,将脉压结果中超过该门限的目标部分提取出来,即为舰船目标一维距离像。
3 测量结果
3.1 同一舰船不同姿态的一维距离像
如图3~5所示,通过回波信号并不能直观地看出目标的特征,而通过脉冲压缩得到的一维距离像,则细节更丰富、特征轮廓更明显[9]。
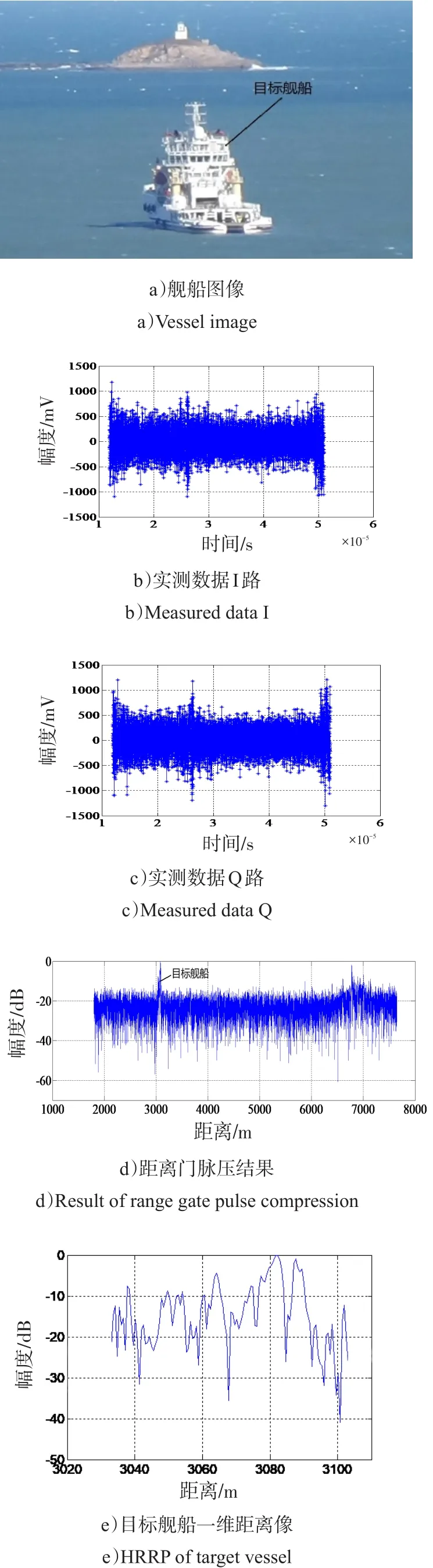
图3 某舰船姿态1测量结果Fig.3 Measurement result of a vessel with attitude 1
图4 某舰船姿态2测量结果Fig.4 Measurement result of a vessel with attitude 2

图5 某舰船姿态3测量结果Fig.5 Measurement result of a vessel with attitude 3
由测量结果还可以看出,同一舰船姿态不同时,距离像差异较大[10]。为使此观察结果更具客观性,本文计算了目标的散射重心[11]与强散射中心数目[12]2个典型参数。
散射重心是在径向长度L所对应的HRRP序列片段上进行研究,将L所对应的HRRP片段记为,则散射重心M定义为:[13]

式中,M的取值范围为[0,1]。
强散射中心数目定义为:[14]
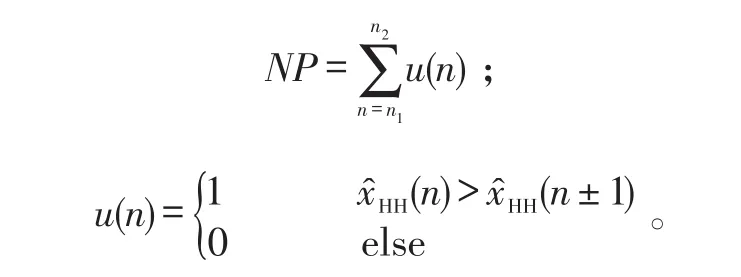
对图3 e)、图4 e)、图5 e)所示同一舰船不同姿态的HRRP分别计算散射重心与强散射中心数目的结果如表2所示。

表2 各姿态散射重心与强散射中心数目Tab.2 Scattering center of gravity and number of strong scattering centers in different attitudes
上述现象的原因在于目标在光学区可以近似为一组离散的散射点,而当目标的姿态发生变动时,散射点之间的相对径向距离也会随之改变[15]。因此,目标的散射重心与强散射中心数目会发生变化,即HRRP具有姿态敏感性[16-18]。
3.2 不同舰船的一维距离像
图6展示了3艘相同姿态的锚泊舰船的距离高分辨特性测量结果。由图6可见,舰船目标不同,其一维高分辨距离像明显不同,且差异较大。不同舰船的散射重心与强散射中心数目如表3所示。


图6 不同舰船一维距离像Fig.6 HRRPs of different vessels

表3 不同舰船散射重心与强散射中心数目Tab.3 Scattering center of gravity and number of strong scattering centers of different vessels
4 结束语
本文利用实验室现有全相参新体制导引头测量平台,对同一舰船不同姿态、相同姿态不同舰船的米级一维距离像进行了实测,为今后深入开展海面舰船目标识别研究奠定了坚实基础。测量结果表明,舰船目标的一维距离高分辨特性与其姿态和结构有很大关系,即同一舰船的一维高分辨距离像受姿态影响较大,具有较强的姿态敏感性,而不同舰船的一维距离像在姿态相同时明显不同。后续将在实测数据的基础上深入开展目标敏感性分析,以期获得可用于海面舰船识别的稳健的距离高分辨特性。
