MRF模型去雾算法在机场场面监视中的应用
2019-04-29向征高华李建锋
向征,高华,李建锋
(中国民用航空飞行学院空中交通管理学院,四川广汉618307)
安全永远是民航运输业排在首位的任务,但近几年,我国各地,尤其是经济发达的北京、天津等地,空气质量污染严重,经常出现严重的雾霾天气。雾霾天气的出现,不仅对人们的健康产生一定危害,而且给交通业带来了很大的影响,特别是对民航业的影响尤为重大,雾霾轻时会导致少许航班的延误,严重时则会造成大面积的机场航班延误,给人们的日常出行生活带来严重的影响[1]。因此,在雾霾天气下,对机场场面监视系统雾霾图像的去雾处理就显得尤为重要了。
对于机场场面监视系统雾霾图像的去雾霾处理,本文提出了一种基于马尔科夫模型[2](Markov Random Field Model,MRF)的去雾霾的算法,经试验结果验证并利用CNC去雾综合评价体系与传统的Retinex算法、He算法等去雾算法的对比,此去雾算法在机场场面监视的去雾霾的效果方面具有较好的应用性和鲁棒性。
1 基于MRF模型的去雾算法
1.1 MRF模型
马尔科夫随机场常常被用于标签的分配来建立各标签的概率分布,具有马尔科夫的特性[3]。在机场场面监视图像的去雾霾处理中,我们采用基于MRF模型的方法,同时,将隐含层与雾气的浓度水平相联系并以此来估计大气散射模型中的传播图。由此,便可以利用基于MRF模型的代价函数来解决机场场面监视中的去雾霾问题[4]。这个过程表示为:

式(1)中:f={fa|a∈A}为图像A的标签;fa为图像A中像素a的标签,fa={1,2,3,…,k};a为b的邻域;N为四邻域像素对。E(f)表示最小化2项之和,第1项Da(Ω)为数据项,像素和其标签的差值越小,Da(·)值越小,若a的标签fa与观测得到的数据Ia的差别越大,则Da(·)对此像素标签的惩罚越大;第2项Va,b(·)为平滑项,集合N中像素标签的差值越小,Va,b(·)的值越小。
1.2 算法流程
马尔科夫模型算法的去雾过程有3步:第1步是依据天空区域的3个显著特性计算大气光值。第2步是采用MRF模型和双边滤波求取传播图[5]。该步骤的目的在于通过采用基于图切的α-扩展技术来分配准确的像素标签,并使用双边滤波消除冗余的细节信息。第3步,依据大气散射模型,将得到的大气光值和传播图带入散射模型,以计算得到去雾后图像的场景辐照度。整个算法的流程如图1所示。

图1 马尔科夫模型算法流程示意图Fig.1 Flow diagram of Markov model algorithm
1.3 大气光值估计
由于大气中悬浮微粒的存在,导致光线有可能发生在散射并在介质中被吸收[6]。描述雾天图像成因的大气散射模型为:

式(2)中:I(x)为观测点x=(x,y)接收到的光强;J(x)为场景点处辐照度;A为大气的光值;t(x)为光路的传播图;J(x)t(x)项被称为直接衰退模型;A(1-t(x))项被称为大气光模型。
为了有效地估计出大气的光值,须要考虑天空区域具有的3个特征:①在暗原色图像中亮度较高[7];②灰度较为平坦;③位置偏上。
针对第1个特征,采用最小值滤波操作,以求取彩色图像的暗原色图像Imin(x),属于天空区域的像素应满足条件Imin(x)>Tv,Tv为Imin(x)中最大值的95%。对于第2个特征,采用Canny算子进行边缘检测,分块统计边缘像素点数目占总数的百分比,记为Nedge(x)。由此,第2个限制条件可表示为Nedge(x)<Tp。其中,Tp为平坦阈值,一般为0.001。同时满足Imin(x)和Nedge(x)的像素集合为候选天空区域。依据第3个特征,因而选取图像上方的第1个连通域作为天空区域,该区域对应的原有雾图像I(X)中的最大像素值即为大气估计光值A。
1.4 传播图估计
1)初始传播图估计。这里主要采用基于图切的α-扩展方法来估计传播图t(x)。具体来说,传播图的每一元素ti均与一个标签xi相关联,这些标签集合可表示为L={0,1,2,…,l},其代表了传播图像素值{0,1/l,2/l,…,l}。由此,各像素的标签单位被设置为8且l=31,标签总数为32[8]。最小化相关能量函数即可得到最为可能的标签x*为:

式(3)中:P为未知传播图t(x)的像素集;N为四邻域的像素对集合;Eij(xi,xj)为平滑函数;Ei(xi)为数据函数。
对于函数Ei(xi),其表示像素i具有与标签xi相关的传播图值ti的概率。其过程可表示为:

式(4)中:I′i为灰度图像的像素值(0≤I′i≤1);L(xi)表示标签集合L={0,1/l,2/l,…,l}中的每一个元素;ω的引入以确保I′i和L(xi)具有相同的数据集。
对于平滑函数Eij(xi,xj),采用如下的线性代价函数,并通过α-扩展技术进行函数求解:

对室外场景图像,考虑像素i和j,其中j位于i的上部,则可推知dj>di,且传播图tj的像素j应小于或等于传播图ti的像素i,即xj≤xi。对不满足的情况,将赋予一代价因子c>0。因此,式(5)可表示为:

式中,w和c用来控制图像去雾效果的程度[9]。
w用来控制细节增强的程度,通常设置为0.01~0.1;c用来控制图像色彩复原的程度,通常设置为100~1 000。
2)精细化传播图估计。基于MRF模型算法估计得到的初始传播图存在不连续性,为消除这一不连续性,应采用双边滤波来精细化传播图的估计[10]。因此,由上述算法得到的传播图tini的冗余信息可被消除,从而改善了复原图像的细节能力。这一过程可表示为:

式(7)中:tini(u)为像素位置u=(x,y)处的初始传播图;N(u)为u的邻域;空间邻域相似函数wa(x)是标准差为σa的高斯滤波器,。而灰度相似度函数ws(x)是标准差为σs的高斯滤波器[11]。
2 基于视觉感知的去雾霾效果评价方法
基于视觉感知的综合评价体系CNC(Contrast Naturalness Colorfulness)主要通过图像的对比度、自然度和色彩丰富度等指标来评价算法的去雾霾的效果[12]。CNC评价体系的框架如图2所示,对于CNC评价指标而言,须要考虑图像对比度、色彩自然度和色彩丰富度,以生成整体的去雾效果评价体系[13]。因此,原有雾图像x和去雾图像y间的CNC评价指标可定义为:

式(8)中:e用于衡量图像x和y的可见边数目;CNI为图像的色彩自然度;CCI为色彩丰富度。

图2 CNC评价体系总体框架示意图Fig.2 CNC evaluation system overall frame diagram
3 实验结果与分析
3.1 MRF模型算法的去雾效果
图3所示为待处理的雾霾天气下机场场面监视的飞机图像,采用上述基于MRF模型的去雾霾算法对该图像进行去雾霾处理,所得的初始传播图如图4所示,图5为进行双边滤波[14]处理后的结果,图6为最终得到的去雾霾后的图像。本节的实验环境均为32bits、3.00GHz的Windows系统上的Matlab R2014a软件[15]。

图3 监视有飞机的雾霾图像Fig.3 Surveillance planes of haze image

图4 初始传播图Fig.4 Initial propagation graph

图5 经双边滤波后的结果Fig.5 After bilateral filtering results

图6 经MRF模型去雾霾算法处理后的最终图像Fig.6 After MRF model to haze algorithm treatment of the final image
3.2 MRF模型去雾霾算法与传统算法的对比
选取停机位、滑行道等不同的雾霾天气下机场场面监视的场景,并用基于MRF模型的去雾霾算法与其他的算法进行了对比。图7是MRF模型去雾霾算法与Retinex算法[16]的去雾霾效果的对比,从图7中可以看出,Retinex算法的去雾霾效果颜色看起来不太自然,且存在光晕伪景现象,而MRF模型算法无此问题。图8是MRF模型算法与He去雾算法[17]的实验效果的对比,从图中可以看出,He算法天空区域的颜色似乎与雾霾天图像有些不太一致。图9是MRF模型算法与Tan去雾算法[18]的实验效果的对比,从图中可以看出,MRF模型算法比Tan算法具有更好的细节保持能力,且去雾霾结果的颜色与输入图像的颜色更为接近。
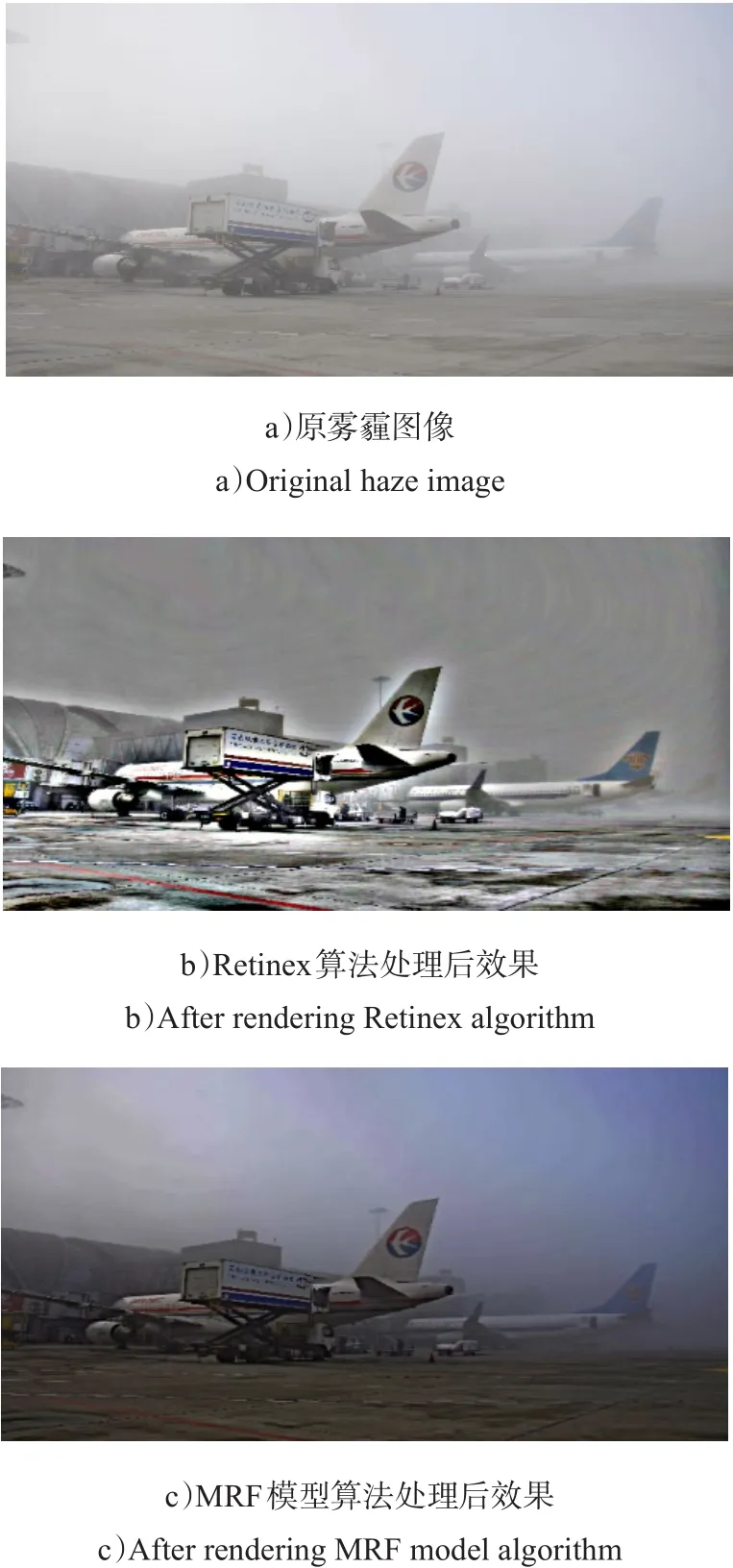
图7 MRF模型算法与Retinex算法效果的对比Fig.7 Effect comparison of Retinex algorithm ang MRF model algorithm

图8 MRF模型算法与He算法效果的对比Fig.8 Effect comparison of MRF model algorithm and He algorithm


图9 MRF模型算法与Tan算法效果的对比Fig.9 Effect comparison of MRF model algorithm and Tan algorithm
为定量评估Retinex去雾算法、He算法、Tan去雾算法和MRF模型去雾霾算法。利用上述的图像对比度-色彩自然度-色彩丰富度指标来客观地评价算法的去雾霾效果,其CNC值统计结果见表1。由表1可知,采用MRF模型算法可以获得较大的CNC值。这一结果表明:相比于其他传统的去雾算法,经MRF模型算法处理后的图像在图像对比度、色彩自然度和丰富度方面均有更好的恢复,即MRF模型算法在多数的雾霾天气下能够取得相对更好地去雾霾效果。

表1 几种去雾霾算法的CNC统计值比较Tab.1 Several to haze CNC statistical value comparison of the algorithm
4 结语与展望
对于雾霾天气条件下机场场面监视图像的处理,本文提出了一种基于MRF模型算法的去雾霾方法。首先,介绍了MRF模型去雾霾算法的基本理论;然后,又引出了基于视觉感知(CNC)的去雾效果评价体系;最后,用Matlab R2014a对机场雾霾监视图像进行了基于MRF模型算法的去雾霾处理,并与Retinex、He和Tan等传统去雾霾算法进行了效果的对比。可以得出:基于MRF模型算法对雾霾图像的处理具有相对更好的效果和鲁棒性,对雾霾天气下机场场面监视的处理具有一定的参考和应用价值。但是对于更严重的雾霾天气是否适用,还有待于在以后的学习中进行更深一步地研究。
