基于自抗扰控制的电流环控制器设计
2019-04-28闫剑虹
赵 瑞,闫剑虹
(中国空间技术研究院西安分院,西安 710100)
0 引 言
光电跟瞄控制系统常采用三闭环嵌套结构[1],各环节性能的最优化是整个伺服系统追求高性能的基础,而外环性能的发挥依赖于系统内环的优化。电流控制作为最内环,与输出电磁转矩直接相关,因此其动、静态性能直接关系到整个位置伺服系统性能。
目前,电流环的主要控制方法有PI控制[2]、滞环控制[3]、滑模控制[4]、预测控制[5]等,各有优缺点。滞环控制响应快速,但是由于开关频率不固定,存在电流纹波和稳态误差等缺点;滑模控制速度快、鲁棒性强,但是存在“抖振”问题;预测控制可以实现对指令信号无超调地快速跟踪,但是它依赖被控对象的精确数学模型,鲁棒性不足。PI控制器结构简单、性能稳定,是目前电流环使用最多的控制算法。然而,PI控制器存在快速性与超调的矛盾以及积分饱和问题。另外,对于小惯量位置伺服系统,速度变化频繁,且电磁时间常数与机电时间常数数量级相当,反电势干扰变得不可忽略,传统PI控制已经不再适用[5-6]。基于传统PI控制的反电势直接前馈补偿方法,受磁链参数不确定性、速度信号质量以及环路时滞的影响,工程实用性欠佳。再者,数字控制过程中的时滞[6]会引起控制输入与被控量变化的不同步,当控制器增益选择不当时,易引起超调甚至系统振荡。针对传统PI控制的不足,许多学者提出了改进措施,如前馈补偿PI[7]、抗积分饱和PI[8]以及模糊PI控制[9]等,取得良好效果。尤其是自抗扰控制(ADRC)的提出[10],极大地克服了PI控制的不足,获得令人鼓舞的控制效能。已有文献将ADRC用于速度环[11]和位置环[12],但电流环的应用还不多。
设计ADRC控制器,“安排过渡过程”环节解决了超调与快速性的矛盾,而扩张状态观测器(ESO)能很好地估计出包括反电势干扰在内的各种内外干扰,并予以动态补偿。同时,借鉴经典Smith预估控制的思想,设计基于跟踪-微分器(TD)的输出预估器,可以较好的补偿环路时滞,并具有良好的滤波功能。仿真结果表明,文中设计的电流环控制算法能够实现快速、准确、无超调地跟踪参考输入电流,较传统PI控制有更好的动态特性和鲁棒性。
1 永磁同步电机矢量控制模型
本文以表贴式永磁同步电机为研究对象。假设PMSM空间磁场呈正弦分布,磁路不饱和且不计磁滞和涡流损耗影响,当采用的矢量控制策略时,PMSM数学模型如下[13]。
d-q坐标系电压方程:
(1)
运动方程:
(2)
式中,ud,uq为定子电压矢量的d,q轴分量;id,iq为定子电流矢量的d,q轴分量;we为电角速度,wm为机械角速度;电磁转矩Te=1.5pψriq,负载转矩TL。仿真试验用电机参数如表1所示。
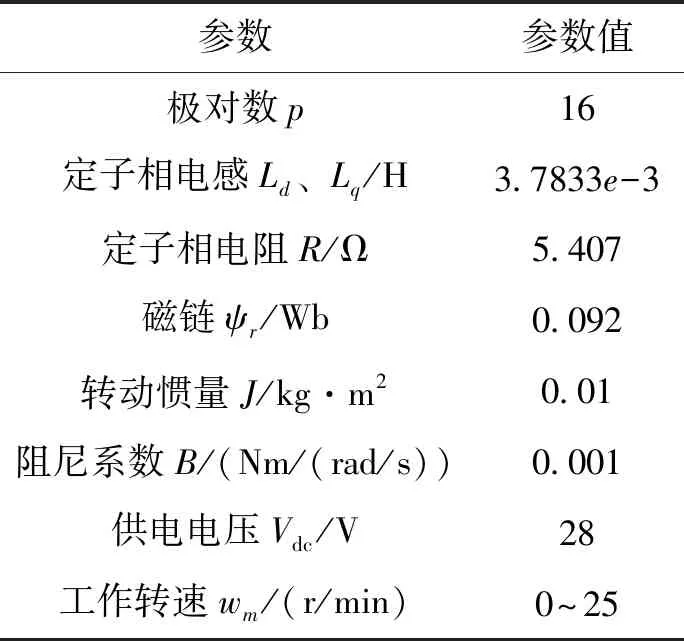
表1 永磁同步电机仿真模型数据
2 影响电流环性能因素的分析
影响电流环控制性能的因素是复杂而综合的。基于PMSM理想化数学模型分析影响电流动态响应的因素,包括反电势干扰、电流动态耦合、环路延时、噪声干扰、谐波畸变以及模型参数失配等[13]。我们重点分析反电势干扰与环路延时对电流环控制性能的影响。
2.1 反电势干扰
由式(1)可见,ef=weψr为施加在q轴电压上的反电势项。对PMSM,转子磁链幅值ψr可认为是常值,则ef的幅值与转子电角速度成比例。在一般运动控制系统中,由于转轴及负载转动惯量较大,电机的机电时间常数远大于电磁时间常数,使得转速的变化相对于电流的变化很慢,ef可以认为是电流环的常值扰动[7,13]。又因为反电势干扰位于电流环的前向通道,按照I型系统整定的PI控制器理论上完全可以克服反电势的影响,达到无静差控制。
然而,对于精密光电跟踪系统,一方面,电机转轴或负载转动惯量通常很小,此时机电时间常数与电磁时间常数相差不大,再将ef视为常值干扰已经不符合实际。文献[14~15]指出:在传统PI控制作用下,当系统为小转动惯量时,惯量越小,反电势干扰引起的误差幅值越大且调整时间越长。因此,PI控制器已不能胜任小惯量系统电流环控制。
另一方面,位置伺服系统在应用于精确定位和动态目标跟踪时,不同于调速系统,其速度往往不是恒定的或者缓慢变化的,而是频繁地出现剧烈的加减速。
如图1所示,位置伺服系统的速度响应将经历加速段、恒速段(大位置给定时,由于速度限幅而使速度保持在最大速度)、减速段和渐近段。电流环反电势干扰系统框图如图2所示。


图1 光电跟瞄伺服系统位置-速度响应示意图
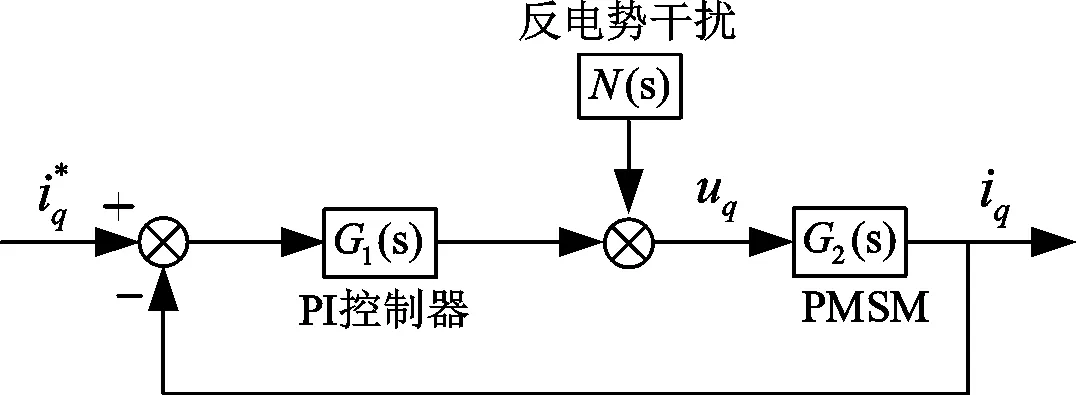
图2 电流环反电势干扰系统框图

(3)
(4)

(5)

(6)
式(4)表明,在理想情况将反电势视为常值干扰时,位于前向通道的PI控制器完全可以将其克服。在式(5)中,当反电势干扰为速度阶跃信号时,稳态误差与速度阶跃信号的强度成正比,与积分系数成反比。也就是说,系统转动惯量越小,越小,则速度变化相对电流变化越快,从而稳态误差越大;由此式亦可知,增大前向通道的积分系数,可减小跟踪误差。由式(6)可知,当反电势干扰为加速度阶跃信号时,反电势干扰下的稳态误差有发散的趋势。图3为传统PI控制对不同形式反电势干扰的误差曲线(A=1,B=500,C=50000)。需要指出的是,实际的反电势干扰不能简单的用上述三种模型中的任何一种完全描述,但是作者认为三种模型的线性组合在时域是一个二次多项式,它能够在一定程度上近似描述反电势干扰的形式。

图3 传统PI控制对反电势干扰的误差曲线
2.2 环路延时
数字控制系统中,由于固有的保持和量化等环节,使系统的控制规律呈现周期性,并引入诸多数字延时[6]。若延时时间Tdelay与电流阶跃响应上升时间相当,则会造成控制输入和被控量变化的不同步,从而会引起超调甚至系统不稳定。从另一个角度,环路延时与电流环带宽成反比关系[6],即环路延时限制着电流响应速度,进而影响速度环和位置环的响应性能。
为了优化电流环动态性能,一方面可以创新采样方式和PWM占空比更新方式,或者提高PWM开关频率。另一方面,还可以通过预测控制技术补偿时滞造成的影响。
Smith预估控制是应对时滞问题的经典方法,文献[10,13]通过研究指出,其实质是在闭环控制系统的反馈回路中加入一个产生超越函数的预测单元,相当于一个高阶微分器。由于电流环时滞Tdelay一般在0.25Tpwm~2Tpwm之间[6],数值很小,故可以将超越函数近似为一阶微分,即e≈1+s。然而,电流反馈不仅含有PWM开关造成的高频谐波,还有反馈回路引入的随机噪声,这种情况对低速小电流的影响更甚。一般的微分器很难从噪声污染的反馈电流中提取高质量的微分信号。韩京清先生应用最速综合函数设计的离散跟踪微分器,不仅具有良好的微分效果,还具有极好的滤波功能[17]。基于此,设计图4所示的输出微分预估器:利用TD对系统输出滤波,并提取y的跟踪信号y1和微分信号y2,进而外推时间后的预期输出信号y0=y1+y2。
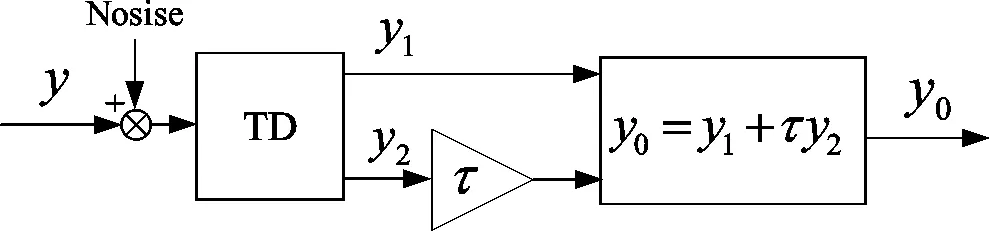
图4 Smith预估器等效一阶微分形式示意图
3 电流环自抗扰控制器
韩京清先生于上世纪90年代创造性地提出自抗扰控制技术(ADRC)[10],这是一种新型非线性实用控制方法,具有良好的抗扰性、鲁棒性和动静态特性。ADRC包含3个部分:跟踪-微分器(TD),扩张状态观测器(ESO)和非线性状态误差反馈控制律(NLSEF),这三部分可以有很多不同的形式。另外,本文还设计了基于跟踪-微分器的输出微分预估器,用于反馈电流滤波和环路时滞补偿。
当采用id=0的矢量控制时,q轴电流与电磁转矩直接相关,而q轴电流起辅助作用。所以,电流环控制器的设计将以q轴电流控制为主。q轴电流状态方程为
(7)
基于上述分析,则轴电流状态方程(7)改为

(8)
式中,控制输入量u=uq,补偿因子b=1/Lq。
以下给出本文设计ADRC的形式。
(1)安排过度过程,以克服快速性与超调的矛盾。
(9)
(2)扩张状态观测器,跟踪反馈电流并估计包括反电势干扰、d轴电流耦合项等在内的扰动总和
(10)
(3)非线性误差反馈控制律,实现“小误差大增益,大误差小增益”[10]的高效率控制
(11)
(4)动态补偿,将ESO的估计结果实时补偿至控制输入
(12)
(5)输出微分预估器,对反馈电流进行滤波并产生预报信号
(13)
y0=y1+·y1
(14)


图5 带预估器的自抗扰控制框图
4 仿真试验
在Simulink搭建三闭环位置伺服系统仿真模型:位置环采用比例(P)控制器,速度环采用PI控制器,d轴电流仍采用PI控制器,q轴电流采用如图5所示的改进自抗扰控制器,PMSM参数见表1。假设上述P、PI参数按照工程最优整定,ADRC参数根据文献[10,16]参考值选取。
为了验证所设计控制器的有效性,采用快速性/有无超调、时间乘以误差绝对值积分(ITAE)指标和鲁棒性等作为电流环控制性能指标。一方面,仿真对比传统PI控制+直接电压前馈补偿和自抗扰控制的反电势补偿效果;另一方面,在ADRC的基础上增加输出微分预估器,验证其时滞补偿能力和滤波性能。
4.1 反电势干扰补偿的仿真分析
(1)方案一:传统PI控制+直接电压前馈补偿
位置给定为10°(0.175 rad)阶跃信号时,速度-电流响应曲线如图6(a)所示。可见,在小惯量位置伺服系统中,速度变化较快;此时,若采用传统PI控制,电流跟踪会出现较大的误差。
在传统PI控制的基础上,直接进行电压前馈补偿[6]是文献中采用的较多方法,其仿真结果如图6(b)所示,电流跟随效果明显改善,几乎可以达到零误差跟踪。在图6(b)基础上使转子磁链较名义值增加50%,得到仿真图6(c),表明反电势前馈效果受制于转子磁链的标称值与实际值是否一致。考虑实际应用中速度反馈信号,尤其是低速信号受干扰严重;在图6(b)基础上,在速度环增加功率为25e-8均匀白噪声,仿真结果如图6(d)。可见,反电势直接前馈补偿的方法将会为电流环引入新的噪声干扰。正如前述2.1节分析,这种方法工程实用价值不高。



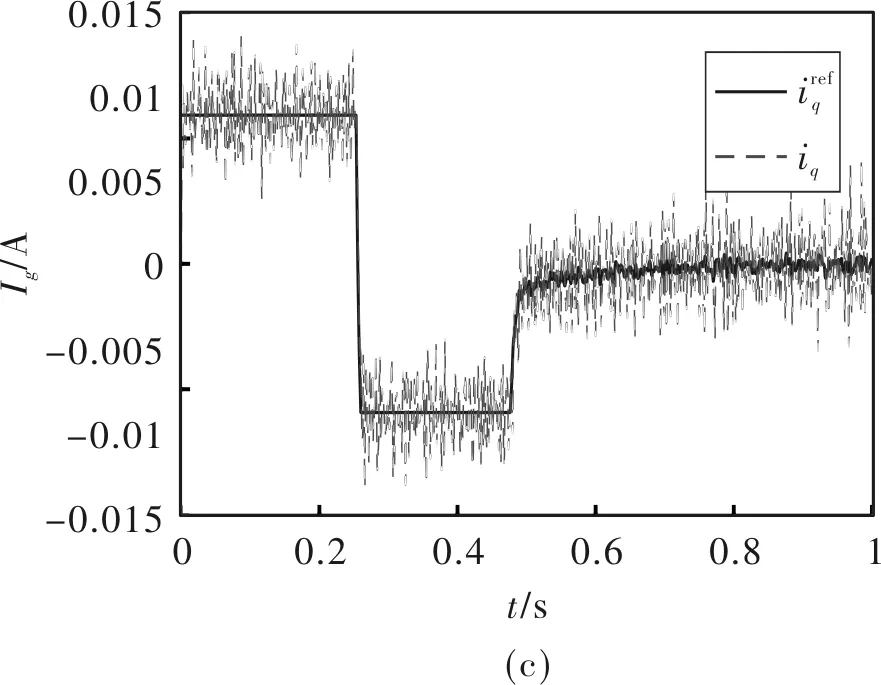
图6 方案一电流响应曲线
(2)方案二:自抗扰控制器
图7(a)为电流环采用ADRC时的电流响应曲线,由于将反电势视为外部干扰,用ESO进行观测,并予以动态补偿,所以反电势干扰的影响基本消除。另外,由于“安排过渡过程”环节,克服了快速性和超调的矛盾,在较大的参数选择范围内可以实现快速无超调的跟踪;由于非线性反馈的“小误差大增益,大误差小增益”[10]的优越性能,不用积分器仍然达到很高的控制精度,克服了积分器饱和与反应迟钝的缺点。


图7 方案二电流响应曲线
图7(b)为当转子磁链较名义值较实际超出50%时的仿真结果,由此可见,ADRC具有极佳的鲁棒性。由于ADRC完全用不到速度信号,所以不存在方案一中速度反馈信号质量不佳所致的补偿效果下降的问题。
图8中,wm1、θ1为采用传统PI控制的速度、位置响应曲线;wm2、θ2为采用ADRC的速度、位置响应曲线。可见,后者的速度和位置响应较前者均提前0.3 s无超调地到达稳态,表明电流环的快速、无超调和准确跟踪参考输入有利于速度和位置响应的及时性,有利于提高速度响应的稳定度。表2总结了传统PI控制与ADRC控制性能的对比,可见ADRC在快速性、无超调、准确性和鲁棒性等方面都优于PI控制及反电势前馈补偿的方法。

图8 电流环PI与ADRC位置伺服系统响应对比

控制方案快速性/有无超调误差指标(ITAE)鲁棒性传统PI控制良好/有2.44e-4一般传统PI+前馈补偿良好/有1.59e-5差 自抗扰控制优/无7.14e-6优
4.2 基于微分预估器的电流预测控制
仿真模型中,电流环的控制周期Ts,即采样步长h为100 μs。假设环路延时Tdelay为0.8Ts[6],先不考虑电流环噪声。采用如图4所示形式的输出微分预估器,滤波因子h0取为h,由于TD本身会延迟1个周期[17],故时滞补偿因子取为Ts。仿真结果如图9所示,分别为q轴电流参考输入、加入时滞环节后q轴电流响应曲线和预估器补偿后的q轴电流响应曲线。可见,时滞环节引起了系统的超调和振荡,经过输出预估器后,消除了时滞引起的振荡。进一步仿真发现,当Tdelay大于1个控制周期时,将引起系统的不稳定。这里需要指出,控制器增益越高系统响应越快,则同等大小的时滞越容易引起系统的超调和不稳定。

图9 基于微分预估器的时滞补偿电流曲线
在反馈电流中加入功率为5e-10的均匀白噪声,滤波因子取h0=5h时。时滞补偿因子取为(1+5)Ts,这个参数应根据滤波因子h0调整,但是不宜过大。仿真结果如图10所示,和iq3分别为q轴电流参考输入、反馈电流、预估器输出电流和ESO输出z1曲线。从图中可以看出预估器由于采用了跟踪-微分器(TD),具有很强的滤波功能,加之ESO也具有一定的滤波功能,所以两者配合使用,可以形成极好的滤波效果。另外,预估器的延时预报功能,不仅可以补偿自身的滤波延时,还可以有效补偿环路延时。
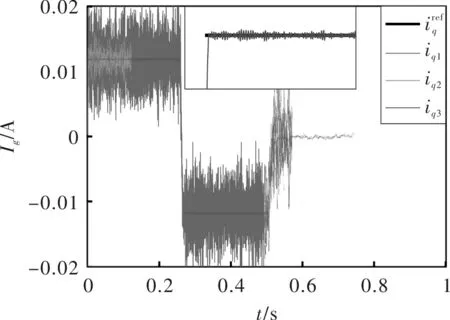
图10 带预估器ADRC反馈电流滤波效果曲线
5 结 语
本文通过分析指出,对于小转动惯量的位置伺服系统,反电势将造成电流动态跟随误差,进而影响速度和位置响应的及时性;另外,数字控制中环路时滞易引起电流超调的问题。因此,传统PI控制器已经很难胜任高精度场合的电流环控制。
设计了带输出微分预估器的电流环ADRC控制器。仿真对比试验证明,在快速性、无超调、准确性和鲁棒性等方面,ADRC都优于传统PI+前馈补偿的方法。最后,在ADRC基础上增加输出微分预估器,仿真试验证明了其对时滞问题的有效性,且具有良好的滤波性能。
