基于伪随机码相位调制和外差探测的高精度激光测速测距系统研究*
2019-04-20邱子胜李姝欣程楚玉傅紫源
杨 馥,邱子胜,李姝欣,程楚玉,刘 政,傅紫源
(1.东华大学 理学院·上海·201620;2.上海卫星工程研究所·上海·201109)
0 引 言
高精度激光测速测距技术被广泛应用于航空航天、国民经济和国防等领域,如深空导航、无人航天器自主交会对接、车载激光测距测速、三维地图构建等[1-5]。传统测距方式常采用脉冲激光飞行时间法,即发射较高峰值功率的脉冲,利用激光脉冲往返的时间间隔来获取距离信息,并利用距离的微分来获取速度信息。这种方法结构简单、技术成熟,但在远距离情况下工作时,需要激光器具备极高的峰值功率。为保证激光器的安全运转,出射脉冲的重复频率较低,因而测量的空间分辨率难以提高[6-8]。而在遇到目标距离出现突变的情况时,通过距离微分来获取目标速度的方法存在较大的误差。因此,一些新的测量方案不断被提出,如基于伪随机码和光子计数的测距技术[9]。该技术方案采用直接测量机制,将出射激光按照伪随机码进行强度调制,回波微弱的光子信号序列经过阈值甄别后得到接收的码元序列。该码元序列与原始伪随机码序列进行相关运算,相关运算的峰值所对应的距离即为目标距离。该技术的优势在于即使回波信号微弱到光子量级,回波码元出现大量误判,也能够利用回波码元与伪随机码之间的相关性得到正确的目标距离信息,从而大大提高了系统的灵敏度;除此以外,还有基于啁啾调幅的相干测量机制[10]。该测量方案采用相干探测机制,出射激光按照光强进行啁啾调制,回波信号与本振光进行相干探测。经过啁啾解调,可得到一单频信号,该信号的频率与目标距离成正比。该技术的优势在于激光器工作在宽脉宽、低峰值功率状态下,可大大提高脉冲重复探测频率,从而提高空间分辨率;另外,相干探测可利用本振信号放大回波小信号,从而较直接探测具备更好的灵敏度。本文提出了一种联合伪随机码相位调制和外差探测技术的方法,并搭建了实验验证系统。利用此技术对漫反射转动目标进行测量,在调制速率为100MHz的条件下,实现了0.138m的测距精度,以及4.16cm/s的测速精度。
1 实验原理
基于伪随机码相位调制和外差探测的激光测距测速系统的原理如图1所示[11]。激光经耦合器处理可被分成两部分,其中绝大部分通过电光相位调制器按照伪随机码信号进行相位调制,并作为出射激光由望远镜发射出去,另一部分通过声光移频器进行移频,并作为本振信号光用于相干探测。
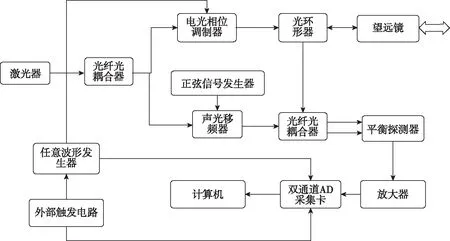
图1 基于伪随机码相位调制和外差探测的高精度激光测速测距系统原理图 Fig.1 Schematic of the high precision laser range measurement system based on the PRC phase modulation and heterodyne detection
经伪随机码相位调制的出射信号为
S=Arcos[ωct+PRC(t)π+φ1]
(1)
式中,Ar为出射激光的振幅,ωc为出射激光的频率。
(2)
式中,bn为伪随机码序列,取值为非0即1。系统采用M序列,伪随机码由任意波形发生器(AWG)提供。p(t)为门函数,其表达式为
(3)
同轴望远镜接收到的回波信号携带有物体的径向速度信息,表现为多普勒频移。其中,多普勒频移量ωd=2u/λ,u为径向速度。回波信号表示为
S=Arcos[(ωc+ωd)t+PRC(t-2R/c)π+φ1]
(4)
经过声光移频器进行移频的参考本征信号为
L=ALOcos[(ωc+ωm)t+φ2]
(5)
式中,ωm为声光移频器的频移量,回波信号光通过耦合器与本征信号光发生相干作用,在经过光电平衡探测器时被转化为电信号,在经过双通道AD采集卡时被转化为数字信号。采集的相干信号为
(6)

双通道AD采集卡的另一通道负责采集电光相位调制器的驱动信号。采集的两路信号在计算机处完成信号处理,主要方法为将电光相位调制器驱动信号和相干信号依次移位相乘,并做傅里叶变换,即
(7)
式中,N为一个完整M序列的码元数,它与M序列阶数m之间满足N=2m-1。由式(7)可知,当移位延迟的码元时间nT0和由目标导致的延时量2R/c一致时,Y将转变为相位连续的三角函数,此时的幅度谱在中频ωm-ωd处具有最大值。因此,系统可根据功率谱出现最大峰值时对应的延迟码元数n得到目标距离信息,即L=cnT0/2,根据最大峰值对应的频率可得目标的径向速度,即
u=λ·(ωm-ωd)/2
(8)
2 基于伪随机码相位调制的外差实验系统
基于上述基本原理,搭建了基于伪随机码相位调制和外差探测的激光测速测距实验系统,如图2所示。
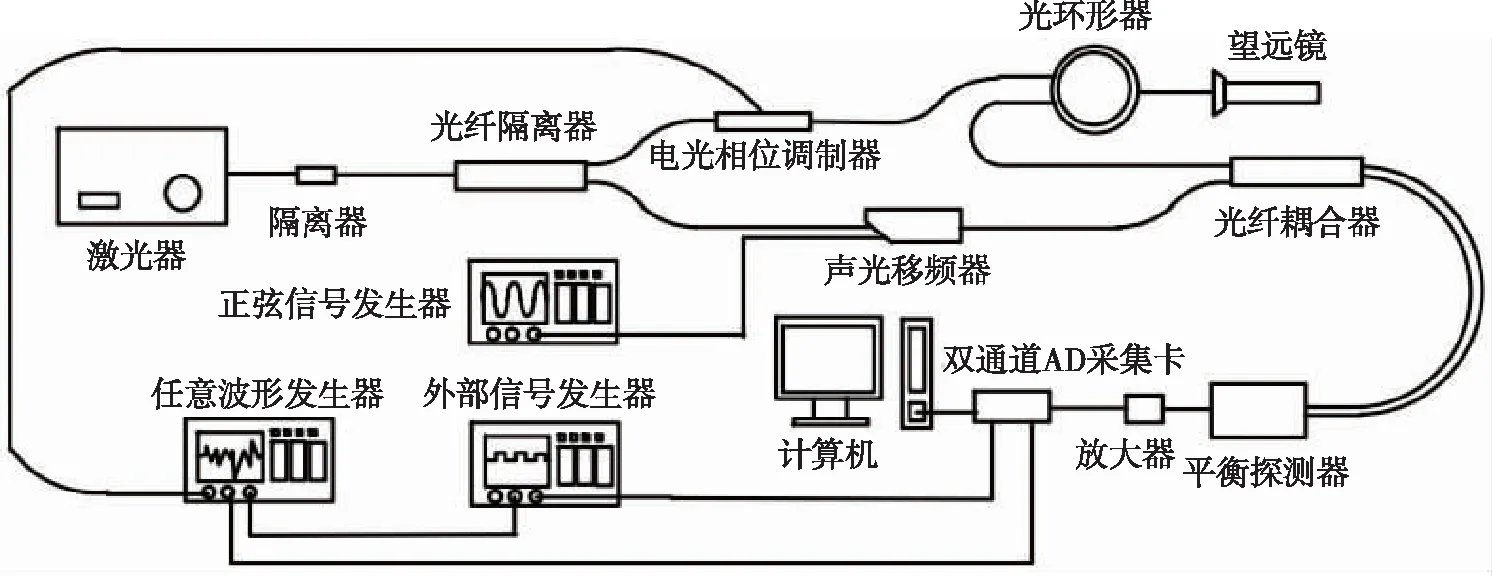
图2 系统实验图Fig.2 Experimental optical system
系统采用1550nm的单模窄线宽连续激光器作为光源,激光器的处理输出功率为11.4mW。激光器输出经隔离器处理后与10:90耦合器相连。激光器输出的绝大部分光源可通过电光相位调制器按照伪随机码信号进行相位调制,调制器的驱动信号由任意波形发生器提供,调制后的信号经环形器处理后作为出射激光由望远镜进行发射,出射功率为2mW;另一部分光源通过声光移频器移频后作为本振信号光用于外差探测,频移量为25MHz,本振信号功率为117μW,出射望远镜的口径为2cm。望远镜的出射激光经目标漫反射后,携带目标距离信息和径向速度信息的激光回波信号与本振信号光在耦合器中发生相干作用,并在经过光电平衡探测器时被转化为电信号,在经过双通道AD采集卡时被转化为数字信号。双通道AD采集卡的另一通道负责采集电光相位调制器的驱动信号。AD采集卡的采样速率为1GHz。外部触发器用于提供AD采集卡和任意波形发生器的触发信号,从而保证系统的同步性。采集的两路信号在计算机中完成信号处理,并得到目标的距离信息和径向速度信息。
3 实验结果与讨论
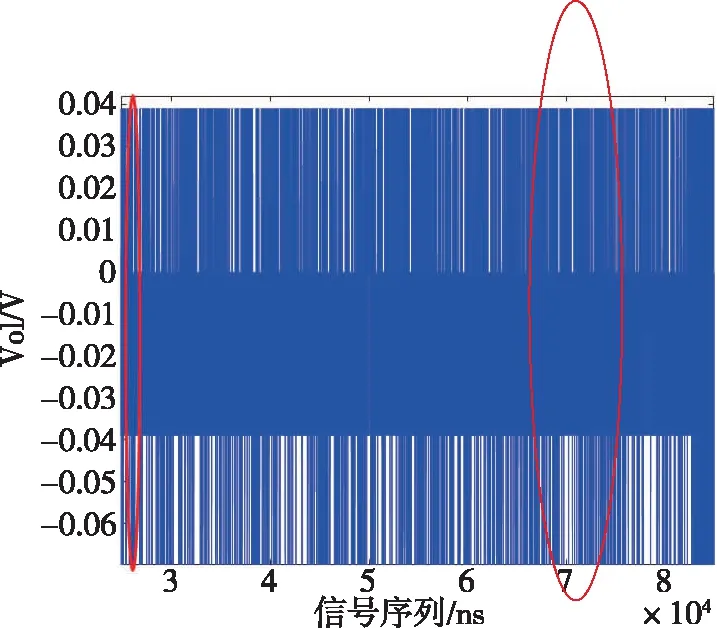
实验采用100MHz的13阶M序列伪随机码对激光进行相位调制,探测目标为常用的铝片风扇。风扇被放置于距离发射系统约8m处的位置,扇叶匀速转动。系统采样频率为1GHz,伪随机码序列长度为81.9μs,如图3所示,对应的距离分辨率为15cm,径向速度分辨率为du=λ/(2*Tpulse)=0.0091m/s。
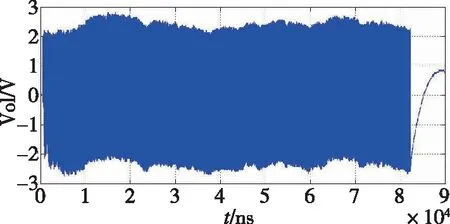
图3 ADC采集的伪随机码驱动信号Fig.3 PRC signal accumulated in ADC channel 2
转动风扇的漫反射信号与本振信号相干,相干信号如图4所示。
(a)整体信号(a) The whole signal
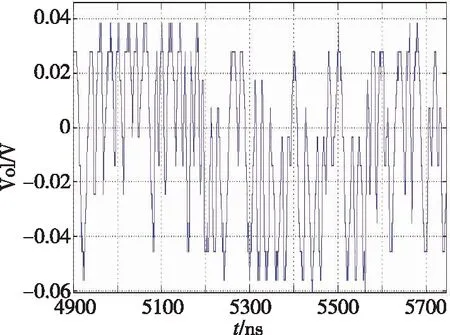
(b)图(a)中标注部分的放大信号(b) The zoomed signal with the mark in the (a) figure图4 ADC采集的相干信号Fig.4 Heterodyne signal in ADC
由图4可知,激光被调制部分的波形表现为相位不连续的正弦波信号,正弦波频率与声光移频器的频移量及目标径向速度相关。外差信号与伪随机码驱动信号移位相乘。当移位量与距离延迟相匹配时,得到的信号傅里叶变换频谱如图5所示。图5所示为中心频率为25MHz时,为声光移频器输出的25MHz基准信号,其附近的另一峰值23.27MHz则是由转动风扇在望远镜激光出射方向上的径向速度带来的多普勒频移引起。
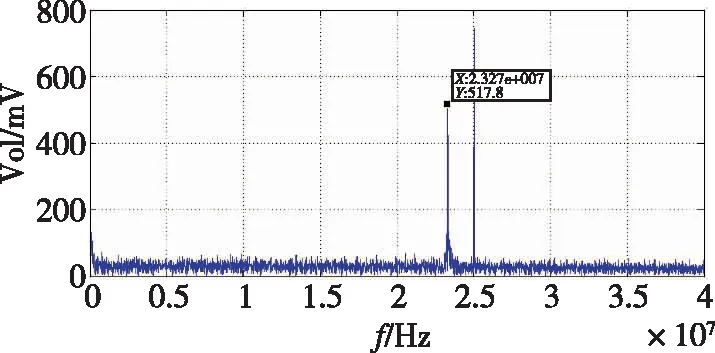
图5 转动物体的信号频谱图Fig.5 Rotation frequency spectrum
为了获取系统的测速测距精度,重复实验50次,得到的目标距离信息、径向速度信息分别如图6、图7所示。
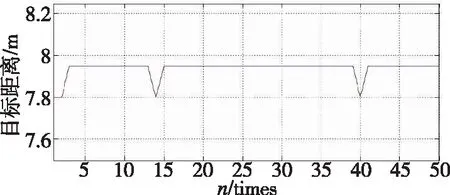
图6 转动物体的距离测量Fig.6 Rotation range measurement
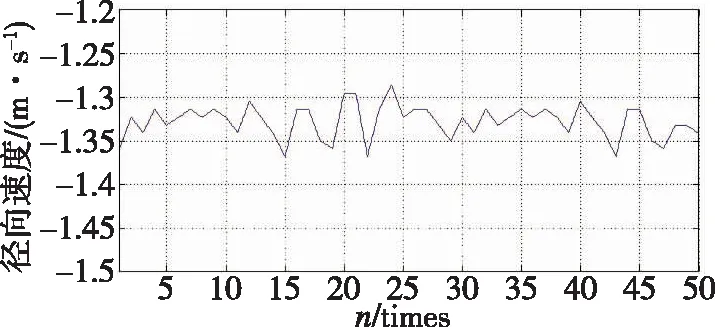
图7 转动物体的径向速度测量Fig.7 Rotation velocity measurement
从图6、图7可以看出,目标的平均距离为7.938m ,距离精度为0.138m,平均径向速度为1.372m/s,径向速度精度为4.16cm/s,与预估的目标距离、径向速度一致。距离精度与距离分辨率密切相关。在此系统中,伪随机码的调制速率为100MHz,但是AD采样速率为1GHz,即能够以1ns(对应的目标距离间隔为15cm)为单位来精确匹配伪随机码的延迟时间,所以从图6可以看出,测得的目标距离仅在2个相差为15cm的目标距离值之间跳动。径向速度精度同样与速度分辨率密切相关,本实验系统中的速度分辨率接近1cm/s,实验测得的径向速度精度为4.16cm/s。其中的原因,可能是由于在重复多次的测量过程中,转盘的径向速度并不能保持恒定。若系统采用更高的调制速率及AD采样速率,以及目标的运动速度能够保持恒定,则系统的测速测距精度可获得进一步提高。
4 结 论
本文讨论了基于伪随机码相位调制和外差探测的测速测距系统实施方案,并搭建了实验验证系统。当激光出射功率为2mW、参考光功率为117μW、伪随机码相位调制速率为100MHz、伪随机码序列长度为81.9μs、采样速率为1GHz时,系统对在约8m处、径向速度约为1.4m/s的目标进行测量,可获得0.138m的测距精度,以及4.16cm/s的测速精度。目前导致测量距离较短的原因,主要是激光的出射功率及望远镜的接收口径的限制。根据雷达方程可将实验系统参数反推至星载条件,即当出射激光峰值功率从2mW增长至111W、脉冲宽度从117.8μW增长至1mW、脉冲宽度从81.9μs增长至400μs、望远镜口径由2cm增长至70cm时,系统能够有效探测到600km处的目标。此反推参数与由参考文献[13]给出的采用典型巨脉冲飞行时间法的星载测高系统GLAS的系统参数相比,显示出了巨大的优越性。在将本实施方案用于远距离目标探测时,可以将本振信号进行一定延迟再完成出射,这样便可在不增加伪随机码序列长度的前提下完成测量。本文所做的工作充分显示了基于伪随机码相位调制和外差探测的测速测距技术在远距离应用时的优越性。