卫星姿态大角度机动的轨迹规划和模型预测与反演控制*
2019-04-20谭天乐尹俊雄郑翰清
谭天乐,尹俊雄,郑翰清
(1.上海航天控制技术研究所·上海·201109;2.上海市空间智能控制技术重点实验室·上海·201109)
0 引 言
为满足对地遥感、天基科学观测、空间目标监视、空间操控与服务等应用需要,卫星常需实现不同形式的大角度姿态机动。卫星姿态动力学系统在大角度情况下是一个时变、非线性的系统。如何实现高精度、高稳定度、敏捷快速的卫星姿态大角度机动控制,是当前的一个难点问题。
在航天器姿态跟踪机动控制方法中,自适应控制[1-2]能够通过实时调整自身参数,以适应干扰等不确定性的影响,并且可以与其他控制方法结合应用[3-4]。滑模变结构控制[5-11]通过在预先设计好的不同模态上切换,以适应系统结构与参数的变化。其对参数变化及外部干扰不敏感,响应速度快,且具有较强的鲁棒性与自适应性,但需被合理设计以避免抖振问题。鲁棒控制[12-14]根据参数的不确定性及干扰的摄动范围设计控制系统,更适用于模型不确定和外部干扰摄动的情况。智能控制[15-17]不依赖系统精确模型,采用神经网络、遗传算法等形式,利用自组织、自学习的特点,使控制系统能够自我完善,但难以对其控制品质进行精确、定量的分析。模型预测控制[18-20]通过预测模型、滚动优化、反馈校正3个环节进行控制,其控制输入量是通过求解特定的因需求而定的优化函数的极值而获得的。此外,PID控制及其改进方法[21-22]对模型要求不高,控制器的分析设计方法较为成熟,简单高效。最优控制[23-24]通过构造状态和性能相关的目标函数并求解,得出控制量。其他的控制方法,如王青等[25],是在扰动估计的基础上,结合互联、阻尼分配无源控制理论和反步法思想设计出的姿态跟踪控制方法,该方法可保证系统在干扰力矩下的稳定性。其削弱峰化现象,降低了对控制力矩的范数要求,便于工程实际应用。殷春武[26]将姿态跟踪误差的积分引入姿态动力学,得到了扩展系统,并基于多环递归控制策略设计了自适应多环姿态跟踪控制器,有效地提高了姿态跟踪精度。
文献[27]设计了基于模型预测与反演控制的卫星姿态状态转移控制方法。该方法在卫星大角度姿态机动过程的每个控制节拍中,将余下的姿态机动过程作为“一步”考虑。在航天器推力在姿态机动过程中为常值的假设下,进行了“一步”反演。采用该方法,卫星姿态角在卫星姿态机动结束时仍存在较大姿态偏差,在机动结束后出现了姿态超调及执行机构输出饱和的现象,需要较长时间的逐步稳定,且容易激起星上太阳帆板等挠性部件的振动。
单步的模型预测与反演控制在姿态稳定和跟踪控制上具有良好的控制品质。利用这一特点,针对卫星大角度姿态机动,本文提出和设计了基于三角函数的机动轨迹规划方法,结合单步模型预测与反演,以实现高精度、平稳柔顺的大角度姿态机动。仿真试验验证了所述规划及控制方法的有效性。
1 卫星姿态动力学建模[27]
采用欧拉角描述卫星姿态。以近圆轨道卫星第二轨道坐标系[28]Oxoyozo作为姿态基准坐标系。姿态角按照312转序定义。采用飞轮进行卫星的姿态控制。飞轮沿卫星本体坐标系Oxbybzb体轴方向安装。

(1)
(2)

在卫星姿态机动过程中,动力学系统是一个时变非线性系统。在卫星姿态控制的每一个控制周期中,将式(1)作为定常系统考虑,并令u为常值,以每一控制节拍的起始时刻/采样时刻作为t0时刻,以结束时刻作为tf时刻,求解系统的状态转移过程,得到
xtf=Φtf,t0xt0+Qtf,t0u
(3)
式中
Φtf,t0=eAT=L-1[(sI-A)-1]
(4)
=(eAT-I6×6)A-1B
(5)
此处的I6×6为6×6单位阵。
2 模型预测与反演控制律[27]
(6)
式中,Φtf,t0xt0为在t0时刻对tf时刻系统状态的预测值。式(6)的通解为
(7)

(8)
取式(7)中的最小范数、最小二乘唯一特解
(9)
结合式(2)、(8)、(9),得到卫星三轴飞轮的控制力矩为
(10)
3 姿态机动轨迹设计
令卫星初始姿态角为θt0,期望最终姿态角为θtf,机动时间为T。以三角函数曲线为基础,设计以下2种机动轨迹:
轨迹1 姿态角与姿态角速度分别为
(11)
(12)
轨迹2 姿态角与姿态角速度分别为
(13)

(14)
t=t1-t0,T=tf-t0。其中,t0为初始时刻,t1为当前时刻,tf为终端时刻。轨迹1是一个1/4正弦形式的轨迹,轨迹2是一个1/2正弦形式的轨迹。
4 仿真验证
仍以文献[27]中所述的实践十二号卫星姿态动力学模型为基础,考虑各个环节的实际偏差和噪声,仿真验证基于轨迹规划、模型预测与反演控制(Plan & Model Predictive and Inversive Control, PMPIC)的卫星姿态大角度机动控制方法。
卫星的惯量分布为
(15)
为检验控制律对卫星质量参数的鲁棒性,将质量参数分别拉偏10%并代入计算
(16)
在卫星上安装2块分别向±X方向伸展的对称的太阳帆板,在仿真中考虑前五阶模态[0.16 0.85 0.96 2.10 2.55]Hz。其中一翼的振动耦合系数如下,另一翼略。
(17)
在仿真中,考虑卫星所受的重力梯度力矩、气动力矩、太阳光压力矩、剩磁力矩等各种环境干扰力矩。姿态确定的姿态角噪声取为0.02° (3σ),姿态角速度的随机漂移取为0.01(°)/h(3σ)。执行机构采用标称角动量为55Nms、标称最大输出力矩为1Nm的飞轮,角动量控制误差为0.01Nms(3σ),采用力矩控制模式。卫星动力学仿真步长为0.05s,姿控周期取为τ=0.2s。卫星初始姿态为[3° -3°
3° 0.3(°)/s -0.3(°)/s 0.3(°)/s]T。仿真时间为400s。
姿态机动过程的规划轨迹采用式(13)、(14)所述的轨迹2的形式,用200s时间将卫星姿态机动到[40°-40°20°0(°)/s0(°)/s0(°)/s]T,之后转入姿态稳定控制。
图1、图2为卫星三轴姿态角仿真曲线。
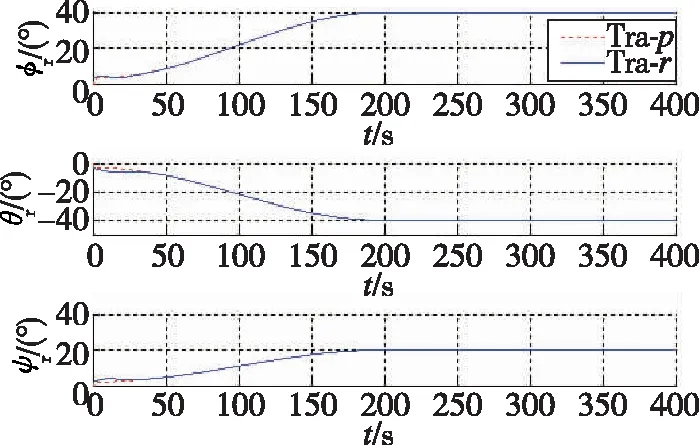
图1 姿态角Fig.1 Attitude angle

图2 姿态角偏差(局部)Fig.2 Deviation of attitude angle(Local)
在机动过程中,卫星姿态角较为精确地跟踪了规划轨迹。由图2可知,在第200s时,卫星姿态角机动到预定值,姿态机动结束时的姿态角误差小于0.02°。
图3、图4为卫星姿态角速度仿真曲线。

图3 姿态角速度Fig.3 Attitude angular velocity
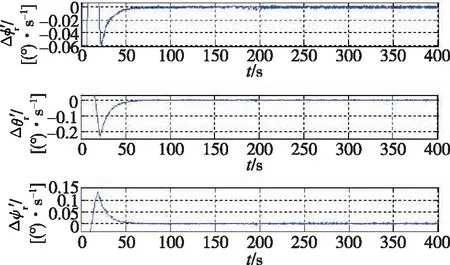
图4 姿态角速度偏差(局部)Fig.4 Deviation of Attitude Angular Velocity (Local)
在机动过程中,卫星姿态角速度也较为精确地跟踪了规划姿态角速度。由图4可知,在第200s时,卫星姿态角速度机动到预定值,姿态机动结束时刻的姿态角速度误差小于0.005(°)/s。
图5、图6为卫星飞轮仿真曲线。由图5可知,在整个姿态控制过程中,飞轮的角动量均在标称值内。

图5 飞轮角动量Fig.5 Angular momentum of wheel
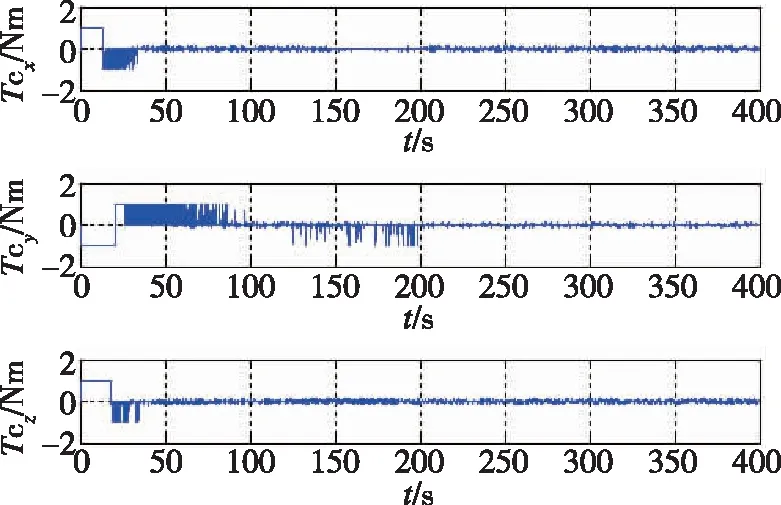
图6 飞轮控制力矩Fig.6 Control torque of wheel
由图6可知,在姿态机动过程中,受最大输出力矩限制,俯仰方向的飞轮出现了力矩饱和现象,这也是图2中俯仰姿态角误差较其他两轴稍大的原因。
姿态机动过程的规划轨迹如果采用式(11)、式(12)所述的轨迹1的形式,姿态机动的性能和效果与按照轨迹2形式进行的循迹机动类似,本文不再赘述。
5 结 论
本文在欧拉角形式下,对卫星姿态大角度机动进行了运动学和动力学分析建模,基于三角函数规划了卫星姿态大角度机动的轨迹,并结合模型预测与反演控制方法,将卫星姿态大角度机动控制转化为小角度下的姿态循迹跟踪机动控制。仿真结果表明,采用轨迹规划、模型预测与反演控制的方法,能够完成卫星姿态高精度、高稳定度、柔顺平滑的大角度循迹跟踪机动。