基于工程模型的六光幕阵列天幕立靶弹头坐标测量不确定度评定方法研究
2019-04-17陈瑞倪晋平刘金龙
陈瑞, 倪晋平, 刘金龙
(1.西安工业大学 光电工程学院, 陕西 西安 710032; 2.黑龙江北方工具有限责任公司, 黑龙江 牡丹江 157000)
0 引言
随着身管武器的发展,速射武器得到越来越广泛的应用[1-2],为对该类武器性能进行评估,需实现高射频连发弹头飞行参数的测量。现有的非接触式测量设备[3-6]中,基于光幕阵列原理的天幕立靶因其靶面大、响应频率快、测速范围广、使用方便、成本低廉等优点,非常适用于速射武器弹头飞行参数的测量[7-8]。双N形光幕阵列天幕立靶由2组在空间呈N形排列的光幕组成,通过测量弹头穿过每个光幕的时刻,结合已知的光幕阵列空间结构,实现弹头飞行参数测量。研究双N形光幕阵列天幕立靶测量不确定度的影响因素和各影响因素下坐标测量不确定度分布规律,对该类设备的优化设计具有重要意义,可有效地提高各类大口径速射武器的测量精度。
目前针对光幕阵列天幕立靶弹头坐标测量不确定度分析的研究大都基于理想测量模型(简称理想模型),它要求2组N形光幕阵列结构完全对称且相同,这在工程实际中难以实现[9-12]。本文结合工程实际,建立双N形光幕阵列工程测量模型(简称工程模型),推导弹头着靶坐标测量不确定度传播公式,综合分析理想模型和工程模型下各影响因素对坐标测量不确定度的影响规律和影响力大小,结合现有技术水平对各因素影响下的坐标测量不确定度进行合成,在选定的1 m×1 m靶面范围得到工程模型下坐标测量不确定度分布。
1 测量模型
两个天幕立靶平行放置,分别称为前靶和后靶,空间形成的探测区域如图1所示。

图1 双N形光幕阵列测量模型Fig.1 Double N-shaped light-screen array model
s和h分别为前靶、后靶的间距和高低差,统称为布靶参数。x轴方向为预设弹道方向,G1~G6表示的6个光幕可被视为理想平面[13]。图2是双光幕阵列在坐标系平面z=0和探测区域内平行于y=0的平面y=b(b>0)内的截面。

图2 双N形光幕阵列截面图Fig.2 Section view of double N-shaped light-screen array
图2中,α1,α2,α3,α4和β1,β2分别表示各光幕间角度,统称为光幕阵列结构参数。弹头依次穿过6个光幕,弹头穿过每个光幕的时刻记为t1,t2,t3,t4,t5,t6,统称为过幕时刻序列。
假设弹头在光幕阵列内做匀速直线运动,根据坐标系内各光幕的空间平面方程,可以计算出弹头在各光幕面内的坐标及弹头飞行速度[14],测量原理为
M·X=N,
(1)
式中:M为各光幕面平面方程系数相关项,由光幕角度决定,
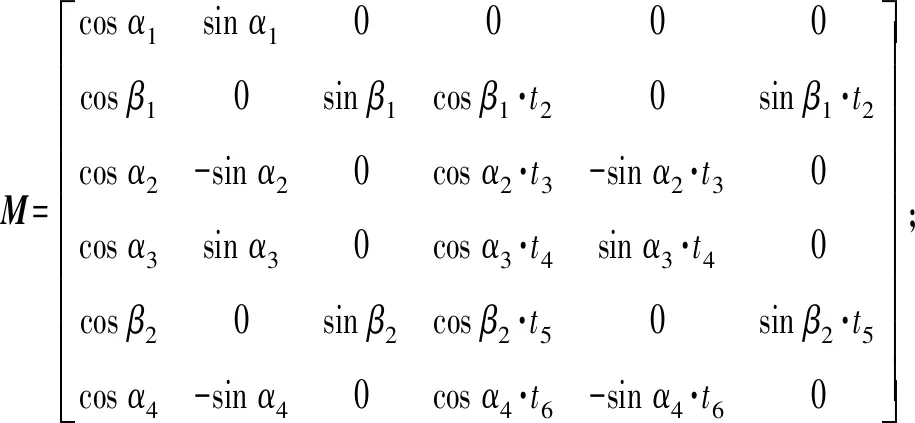
试验中的坐标测量结果常常与纸板靶坐标测量结果进行比对,即在预设弹道方向的延长线上放置一个垂直于x轴的纸板靶,以图1坐标系为例取纸板靶靶面位置为x=s1(s1>0),则纸板靶上的弹头着靶坐标[15]为
(2)
将(1)式计算得到的弹头飞行参数X=[x1,y1,z1,vx,vy,vz]T代入(2)式,可得到弹头在纸板靶靶面内的着靶坐标,由于表达式繁琐这里表示为
(3)
式中:f、g分别表示弹头着靶横坐标和纵坐标的测量函数,由于测量函数中各分量相互独立,在理想模型下横坐标、纵坐标测量不确定度表达式为
(4)
式中:u(αm)(m=1,2,3,4)和u(βn)(n=1,2)为6个光幕角度的测量不确定度;u(s)、u(h)、u(s1)分别为s、h、s1的测量不确定度。
分析(4)式可知,在图1所示的理想模型下,其测量结果的不确定度受到以下因素影响:1)光幕阵列结构参数标定不确定度;2)布靶参数测量不确定度;3)过幕时刻序列提取不确定度。
但在实际工程模型下,由于理想模型中的光幕G1、G3、G4、G6不能严格垂直于Oxy平面,光幕G2、G5也不能严格垂直于Oxz平面,且前靶与后靶布放后也不能完全水平和平行。这些因素将导致光幕阵列空间结构发生相应的改变,从而影响弹头飞行参数测量结果的不确定度。因此对工程模型下的双N形六光幕阵列天幕立靶坐标测量结果不确定度的分析还需考虑:1)光幕垂直度不确定度的影响;2)靶体水平和平行布放不确定度的影响。
最后,不同的弹头飞行速度方向角,也会影响测量结果,因此最后还需考虑弹头飞行方向角的影响。
2 测量不确定度分析
由于各类影响因素来源不同且相互独立,结合工程实际,取(1)式中各参数为s=5 m,h=0 mm,s1=3 m,α1=α2=α3=α4=25°,β1=β2=24°,建立仿真模型,在z=[-500 mm,500 mm],y=[800 mm,1 800 mm]的1 m×1 m靶面范围对各因素影响下的弹头坐标测量不确定度进行仿真分析。
各因素影响下靶面内横坐标、纵坐标测量不确定度的大小和分布不同。在选定靶面范围内选取均匀分布的若干个入射位置,综合考虑各入射位置弹头着靶横坐标和纵坐标测量不确定度,作为整个靶面弹头着靶坐标不确定度的评价函数,如 (5) 式所示:
(5)
式中:δz(j,k)、δy(j,k)分别为横向和纵向的坐标测量不确定度;(j,k)表示靶面内不同入射位置的序号,如1 m×1 m靶面按横、纵方向每50 mm划分一个单位距离,则j=k=1,2,…,21.
考虑弹头沿预设弹道方向入射的情况,飞行速度vx=720 m/s,vy=vz=0 m/s. 根据测量模型求取选取靶面位置的着靶坐标,其中过幕时刻序列(t1,t2,t3,t4,t5,t6)可以通过给定的布靶参数和弹头飞行参数反演得到。
2.1 理想模型下不确定度影响因素
理想模型下的坐标测量不确定度影响因素中,光幕阵列结构参数、布靶参数可在射击开始之前通过测量得到,按照A类评定方法[16]对其进行统计分析,其标准不确定度分量为
(6)
式中:s(xK)为单个测量值的试验标准差,可通过贝塞尔公式得到;N为独立重复测量次数。
由于6个光幕角度测量过程和方法一致,因此具有相同的标准不确定度分量,按照重复性试验方法对光幕间角度进行10次测量并按照(6)式对测量结果进行统计,得到其标准不确定度u(α1)=u(β1)=u(α2)=u(α3)=u(β2)=u(α4)=0.05°. 类似的得到布靶参数标准不确定度u(s)=u(s1)=3 mm,u(h)=1 mm.
弹头过幕时刻测量精度受过幕时刻提取算法、数据采集卡性能及镜头灵敏度等因素影响,采用采集频率为20 MHz的四通道数据采集仪采集弹头过幕时刻信号,可通过查询技术手册和相关文献[10],按照B类评定方法[16]对其标准不确定度进行评估,有u(ti)=2 μm,i=1,2,3,…,6.
上述条件下在选定靶面范围内对理想模型中各因素影响下的坐标测量不确定度进行仿真分析,结果如图3所示。
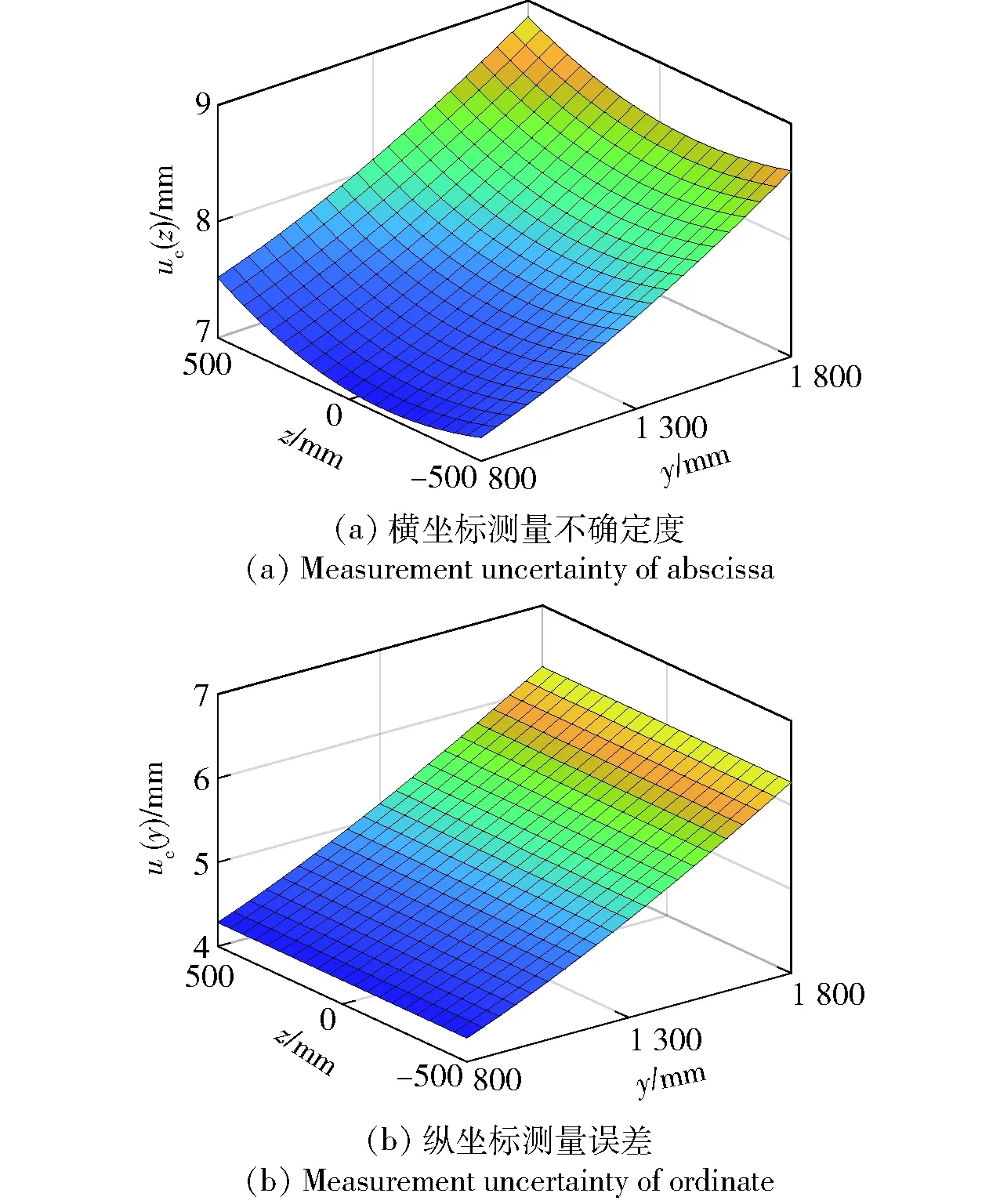
图3 理想模型下坐标测量不确定度仿真分析Fig.3 Coordinate measurement uncertainty in ideal model
图3中两个水平坐标轴表示弹头在选定区域内的入射坐标,竖直坐标轴为通过(4)式计算得到的着靶坐标测量不确定度。
为研究不同光幕角度对坐标测量不确定度影响作用的大小,取各光幕角度不确定度分别从0°逐渐增至0.05°,在选取的靶面内取j=k=21,计算靶面内441个点的测量不确定度,根据(5)式对整个靶面不确定度进行评价,结果如图4所示。

图4 各光幕角度对坐标测量不确定度影响力评定Fig.4 Effect of angle between light-screens on measurement uncertainty
图4中,随着各光幕间角度标定结果的不确定度增加,靶面整体坐标测量不确定度均呈增大趋势,按照影响力顺序排序有α3≥α4≥α1≥α2≥β2≥β1.
2.2 工程模型下不确定度影响因素
工程模型下测量不确定度影响因素,主要是指除理想模型中各影响因素外,实际中存在的改变光幕阵列空间结构的因素,如光幕垂直度不确定度影响因素、靶体水平和平行布放不确定度影响因素。
为了模拟他们在实际工程中对测量结果的影响作用,分别考虑两种因素下引起的光幕阵列空间结构改变,扩充建立的仿真模型,通过弹头飞行参数在扩充后的模型中反演得到弹头过幕时刻序列,并带入扩充前的光幕阵列空间结构求解弹头着靶坐标,仿真分析工程模型下各因素对测量不确定度的影响。
2.2.1 光幕垂直度不确定度的影响

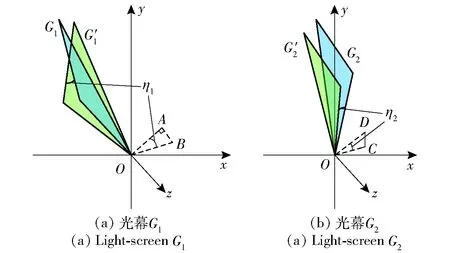
图5 光幕垂直度不确定度示意图Fig.5 Angle between the actual position and the ideal position of light-screens
6个光幕的形成方式相同,通过文献[17]中的标定方法,按照B类不确定度评定方法[16]得到光幕垂直度的标准不确定度为u(ηi)=0.03°,i=1,2,3,…,6. 在选定的靶面内仿真各光幕垂直度不确定度对坐标测量不确定度的影响分布,如图6所示。
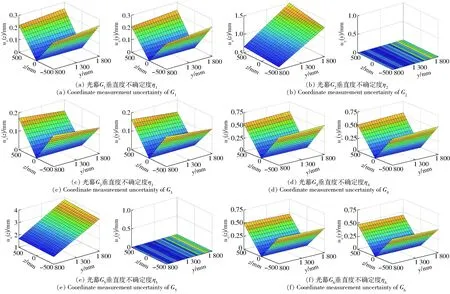
图6 各光幕垂直度不确定度影响下坐标测量不确定度仿真结果Fig.6 Coordinate measurement uncertainty distribution of angle between the actual position and the ideal position of light-screens in selected area
分析图6可得:光幕垂直度不确定度对坐标测量不确定度的影响作用与光幕类型相关;当垂直于竖直平面Oxy的光幕G1、G3、G4、G6垂直度存在不确定度时,坐标测量不确定度随入射横坐标呈对称分布;当垂直于水平面Oxz的光幕G2、G5垂直度存在不确定度时,横坐标测量不确定度随弹头入射纵坐标增大而增大,纵坐标测量误差则不受其影响。
为研究不同光幕垂直度对坐标测量不确定度影响作用的大小,取各光幕垂直度不确定度分别从0°逐渐增至0.03°,在选取的靶面内取j=k=21,计算靶面内441个点的测量不确定度,根据(5)式对靶面整体测量不确定度进行分析。
由图7可以看出,随着各光幕面垂直度不确定度的增加,靶面整体坐标测量不确定度均呈增大趋势,按照影响力顺序排序有η5≥η2≥η4≥η6≥η1≥η3.
2.2.2 靶体水平和平行布放不确定度的影响
在双N形光幕阵列布靶过程中,需要调整前靶和后靶水平并用激光器互瞄对准,以保证前后靶平行。但实际中将不可避免地存在靶体水平和平行布放不确定度,这些不确定度可表示为图1中光幕阵列沿坐标轴方向的旋转。靶体调平后的水平布放不确定度,使其上方的光幕阵列空间整体结构变化,如图8所示。
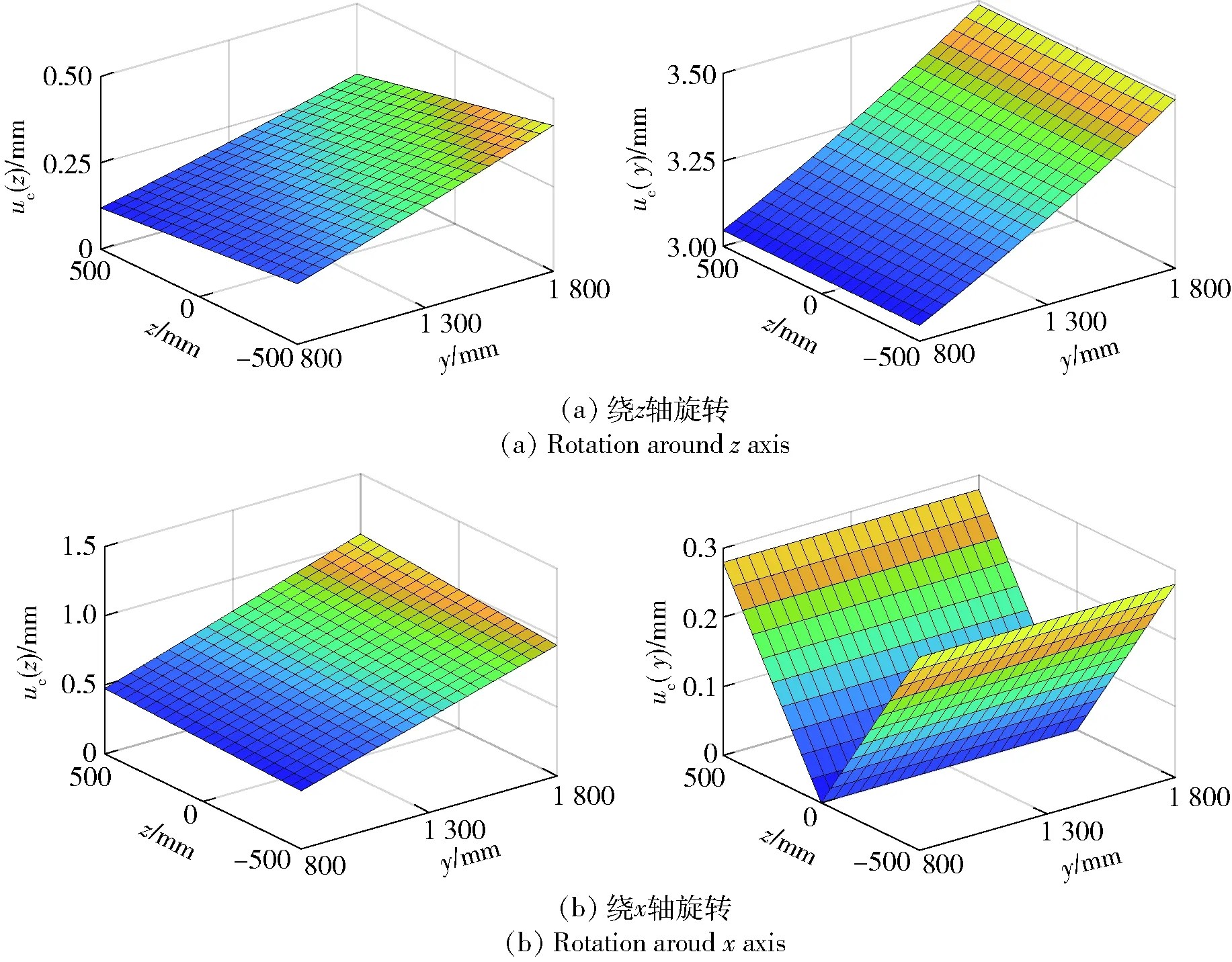
图9 靶体水平布放不确定度对着靶坐标测量不确定度的影响Fig.9 Coordinate measurement uncertainty distribution of horizontal placement uncertainty in the selected area
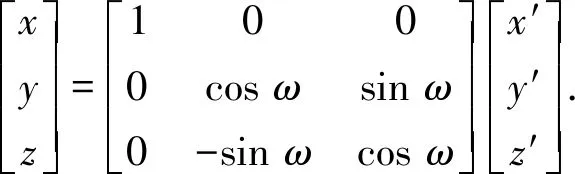
图8中靶体水平布放引起的光幕阵列空间结构变化可分解为沿z轴的旋转τ和沿x轴的旋转ω,分别用(7)式和(8)式表述:

图8 靶体水平布放不确定度Fig.8 Horizontal placement uncertainty of vertical target

(7)
(8)
光幕阵列结构旋转发生在后靶,在建立的测量模型参数条件下,根据B类不确定度评定方法[16]结合相关测量仪器特性和校准规范,取液泡水平仪测量不确定度1′30″,人眼观测不确定度40″,得到图7中靶体水平布放标准不确定度u(τ)=u(ω)=0.02°,在选定的靶面内仿真其对坐标测量不确定度的影响分布如图9所示。
由图9可以看出:绕z轴旋转主要影响纵坐标测量不确定度;绕x轴旋转主要影响横坐标测量不确定度。同样的方法对前靶水平布放不确定度进行分析,可以得到类似的结论。
取前靶激光照射方向为预设弹道方向,后靶与其瞄准后在Oxz平面内存在的不确定度为平行布放不确定度,如图10所示。

图10 靶体水平布放不确定度Fig.10 Parallel placement uncertainty of vertical target

图11 靶体水平布放不确定度对着靶坐标测量不确定度的影响Fig.11 Parallel placement uncertainty of target on coordinate measurement uncertainty in the selected area
平行布放不确定度使得光幕阵列绕y轴旋转ε,用(9)式表述:
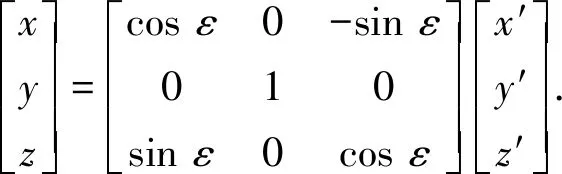
(9)
类似的,取光幕阵列结构旋转发生在后靶,根据B类不确定度评定方法[16]结合相关测量仪器特性和校准规范,得到图10中靶体平行布放标准不确定度u(ε)=0.03°,在选定的靶面内仿真其对坐标测量不确定度的影响分布如图11所示。
为研究靶体水平和平行布放不确定度对坐标测量不确定度影响作用的大小,在各旋转方向分别取不确定度从0°逐渐增至0.03°,在选取的靶面内取j=k=21,计算靶面内441个点的测量不确定度,根据(5)式对靶面整体测量不确定度进行分析,结果如图12所示。
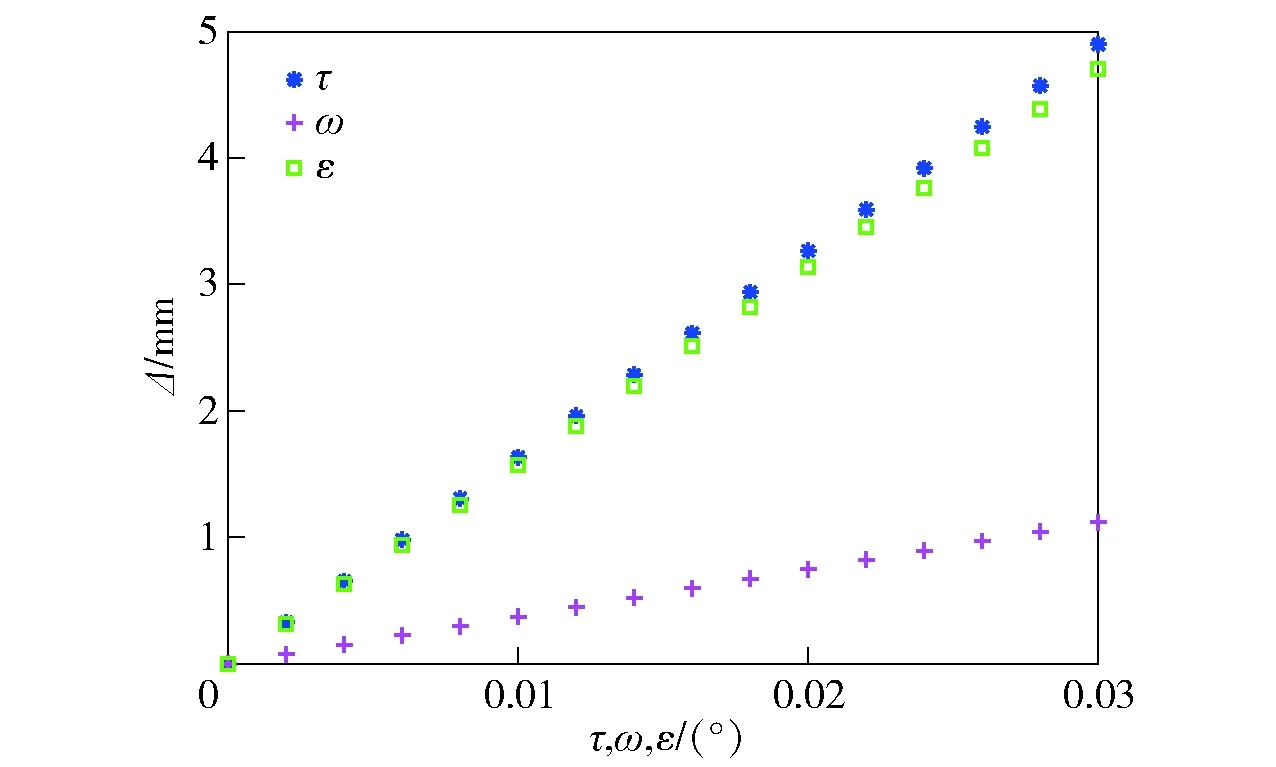
图12 靶体布放不确定度对坐标测量不确定度的影响对比Fig.12 Effects of the horizontal and parallel placement uncertainties of vertical target on measurement uncertainty
由图12可以看出,按照不同的旋转方向对坐标测量不确定度影响力排序有τ≥ε≥ω,即绕z轴的影响大于绕y轴的影响、大于绕x轴的影响。
2.3 弹头速度方向角的影响
2.1节和2.2节中着靶坐标测量不确定度分析均假设弹头飞行方位角θ与俯仰角γ为0°,即vy=vz=0 mm/s. 本节取弹头从靶面固定位置z=0 mm,y=1200 mm处入射,使弹头入射方位角θ和俯仰角γ分别从0°增大至5°,在上述仿真条件下分析速度方位角θ与俯仰角γ对着靶坐标测量不确定度的影响作用,得到结果如图13所示。

图13 弹头速度方向角对着靶坐标测量不确定度的影响Fig.13 Effect of projectile incidence angle on coordinate measurement uncertainty
由图13可知,随着弹头速度方位角和俯仰角的增大,使得坐标测量不确定度有放大趋势。
3 综合因素影响下的不确定度合成
实际使用中各影响因素同时存在,根据第2节分析结果,取弹头速度方位角和俯仰角均为5°,通过 (10) 式对各因素影响下的坐标测量不确定度进行合成:
(10)
式中:δΔαm(m=1,2,3,4)和δΔβn(n=1,2)为光幕阵列结构参数因素影响下的坐标测量不确定度;δΔs、δΔh和δΔs1为布靶参数因素影响下的坐标测量不确定度;δΔti(i=1,2,3,…,6)为过幕时刻序列因素影响下的坐标测量不确定度;δηi(i=1,2,3,…,6)为光幕垂直度因素影响下的坐标测量不确定度;δτ、δω和δε为立靶布放因素影响下的坐标测量不确定度。合成后的靶面不确定度如图14所示。
4 试验验证
用双N形光幕阵列进行实弹试验验证,双N形光幕阵列空间结构经过事先精确标定α1=24.8°,α2=25.1°,α3=25.0°,α4=24.9°,β1=23.5°,β2=24.7°. 试验现场如图15所示。
通过卷尺测量双N形光幕阵列天幕立靶布靶参数s=5 m,h=0 mm,纸板靶距离s1=3 m. 调平和对准之后,用7.62 mm自动步枪对指定的1 m×1 m靶面内随机进行多次射击,在测量结果中剔除异常的测量结果选择10发换算至纸板靶平面进行对比[15],结果如表1所示。
试验得到的测量偏差整体上小于仿真分析得到的不确定度分布,这是由于试验现场各项参数的实际偏差并非全部等于仿真中所取的各项参数不确定度的极大值,但试验结果与仿真结果的分布基本趋于一致,验证了本文仿真结果的正确性。
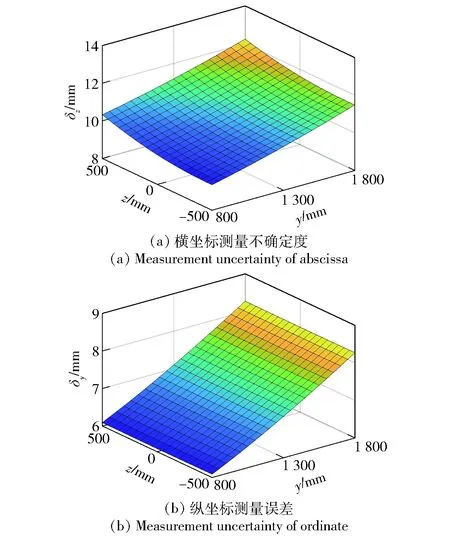
图14 各因素综合影响下弹头着靶坐标测量不确定度分布Fig.14 Distribution of measurement uncertainty in the selected area

图15 试验现场Fig.15 Experimental field
5 结论
基于多光幕阵列方法的天幕立靶是解决速射武器连发测量的理想设备,本文以双N形光幕阵列为例,分析了工程实际中影响弹头着靶坐标测量不确定度的各项因素,包括:理想模型下光幕阵列结构参数、布靶参数、过幕时刻序列影响;工程模型下光幕垂直度不确定度影响,靶体水平和平行布放不确定度影响以及弹头飞行方向角影响。得到各项因素影响下的弹头着靶坐标测量不确定度分布规律,通过对各因素影响下坐标测量不确定度的合成,对选定的1 m×1 m靶面范围的坐标测量不确定度进行估计。试验结果表明,实弹射击结果与仿真结果具有较好的一致性。本文研究结果可为双N形光幕阵列及同类设备的设计、优化提供参考,为提高速射武器弹头着靶坐标现场测量精度提供新思路。