直升机载雷达波束稳定的研究
2019-04-11高一栋
高一栋 牟 聪 任 强
(西安电子工程研究所 西安 710100)
0 引言
直升机载多功能火控雷达(以下简称机载雷达)区别于常规地面雷达,大部分地面雷达工作时处于非机动状态,其天线坐标系较为固定,而直升机为空中运动平台,飞行机动性强,体积小、重量轻,受地形、气流、风力影响较大,飞行过程中,偏航角、横滚、纵摇三轴姿态极不稳定,另外,由于雷达安装在飞机旋翼顶部,旋翼旋转后导致雷达振动,影响较为强烈,因此机载雷达波束稳定控制相对麻烦[1]。
在实际飞行中,飞机的姿态变化是非常剧烈的,对波束稳定的影响同样是巨大的。因此,需要对波束进行补偿,无论飞机姿态发生任何变化,都要保持波束在空间中的位置不变。在飞机的操控终端上,操作指令是按照大地坐标系下发送工作指令,雷达天线的方位、俯仰位则是在天线坐标系中进行的控制,因此,需要结合当前的飞行姿态角,根据当前的操作指令,将大地坐标系下的角度变换到天线坐标系的角度。上报角度数据时,伺服发送的是天线坐标系下的角度数据,因此,还需要将该数据进行坐标反变换,转化为大地坐标系下的角度发送给操控终端。部分文献给出了坐标的转换方法,适用于大部分常规的机械扫描雷达[2-4]。
本系统对地模式为相扫,对空则使用机械圆周扫描方式,相扫模式下坐标转换相对复杂,而机械扫描方式坐标转换相对简单,因为机械扫描时载机坐标系与天线坐标系重合,而相扫时,天线坐标系与载机坐标系不同。因篇幅所限,本文重点对相扫时坐标转换公式进行详细的推导,而对机械扫描方式坐标转换给以简单说明。
1 多种因素导致波束稳定
导致波束稳定的因素角多,雷达安装误差、校靶、惯导校准不精确,都会导致无法得到精确角度。由于采用一维相扫,天线坐标系与传统机械扫描坐标系具有一定的差异,表现在较大的方位扫描角度时,俯仰下降,在地形探测时表现尤为突出。对于雷达安装标校属于测量的范畴,这里不再赘述,本文重点对旋翼振动、飞行姿态变化、坐标系的差异三个方面进行论述。
1.1 飞行姿态的影响
图1为雷达波束照射示意图,以此举例说明,当直升机处于飞行状态时,由于雷达安装在直升机顶部位置,因此,雷达与直升机机体同步摆动,当飞机姿态发生变化时,雷达波束位置也将随着机体姿态发生变化,也就意味着,雷达坐标系与机体坐标系是相同的,雷达坐标系与大地坐标系不一致,在图1(a)可看到,飞机处于平稳状态,雷达与固定翼飞机保持在同一水平面,也就是说在空间大地坐标系下,对于雷达而言,固定翼飞机处于俯仰0°位置,此时直升机为水平姿态,因此0°波束俯仰位可以发现该固定翼飞机;在图1(b)中,机头向下倾斜,飞机纵摇发生了变化,纵摇角为负,因此雷达波束照射到固定翼飞机下方位置,同样,在图1(c)中,机头向上倾斜,纵摇角为正值,波束照射到飞机上方位置,同样导致目标丢失。
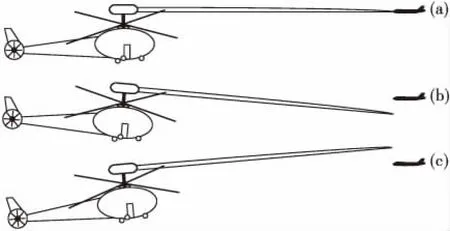
图1 载机带来波束抖动示意图
1.2 雷达天线坐标系与载机坐标系的差异
天线坐标系与载机坐标系的差异,是针对方位相扫时而言,而机械扫描则不存在上述问题,图2是标准坐标系图,为机械扫描时空间波束,图3为相扫时空间波束,两幅图中,OX代表飞机纵轴方向,与天线法线重合,在雷达安装时,需要进行标校,与飞机轴线进行重合。OY轴为垂直向上,OZ轴则按右手定则进行确定,下面分析机械扫描与相扫时天线坐标系的区别:
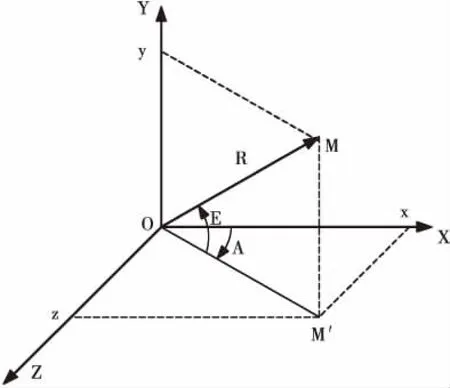
图2 机械扫描坐标
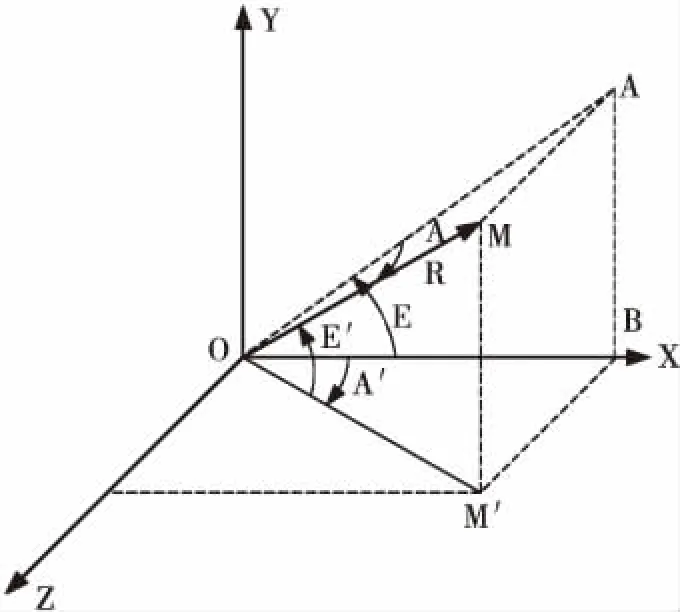
图3 相扫坐标
在图2中,波束方位为A ,俯仰为E,可以得出:
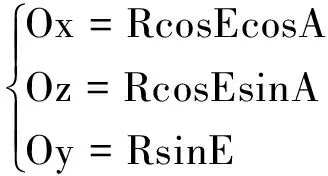
(1)
以图3为例说明,与图2不同的是,波束在MOA所示的平面内进行相位扫描,方面扫描0°,天线俯仰角度为E,当扫描到M点位置时,俯仰角度为E′,可以看出, E> E′,也就意味着,伺服设定某个固定俯仰角度,方位角进行扫描,在法线位置处,俯仰角最大,随着方位远离法线方向,俯仰减小,俯仰呈下降趋势。在极限情况,假如方位能够扫描到90°,则俯仰位变为0°。可总结如下公式:

(2)
实际空间方位、俯仰角为:
(3)
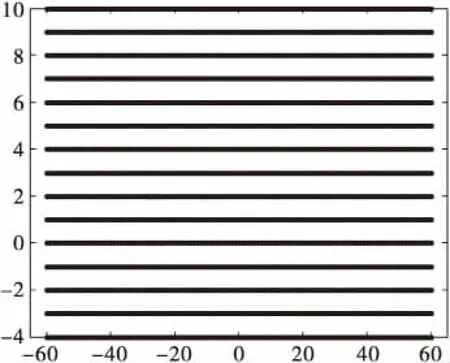
图4 俯仰波束覆盖示意图
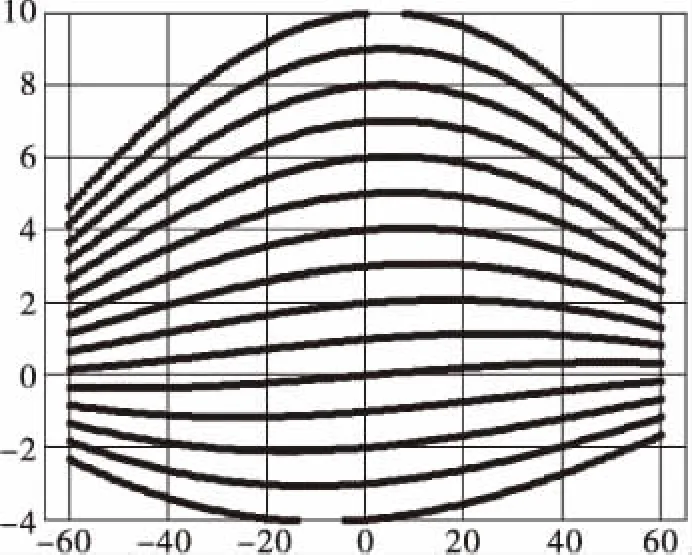
图5 俯仰波束畸变示意图
从公式(3)可以看出,在俯仰较小时,方位角度差别很小;在方位较小时,俯仰角度差别很小。实际工程运用中,在雷达对地、对空、高压线探测模式中,不需要扫描较大的空域范围,俯仰波位少,仅扫描一到两行,而且俯仰波位较低,一般扫描0°及以下角度即可,因此,两者俯仰位差别较小,因而可以忽略不计。需要对地形探测时,方位覆盖从-45°到45°或者-60°到60°俯仰位则需要安排较多的俯仰波位,为探测出山形地貌,安排了数十个俯仰波位,图4中,地形探测模式覆盖了方位从-60°到60°,俯仰从底部-4°到上端10°的区域,可以扫描大部分山形区间,实际根据山形实际高度进行调整。由于方位采用相扫,俯仰采用了机械扫描,实际上的波束空间分布随着方位增大,俯仰下降,从图5中可以统计出,在方位扫描到60°处,本在10°处的俯仰波位,实际空间位置下降到5.3°左右,因此将导致严重后果:第一,地形探测时将遗漏空域,当俯仰位处于高波位时,下降趋势将变得更加严重,方位波束无法照射到两侧的较高的山脉;第二,由于使用了非准确的俯仰位,导致山形产生畸变,雷达界面的山脉轮廓与实际山形不一致。因此需要对俯仰波束进行实时补偿,在俯仰为正值,方位扫描时,逐步抬高两侧俯仰波束,反之,俯仰下视时,随着方位扫描,两侧俯仰波束降低,实际空间波位覆盖时,以尽可能接近图4所示的理想状态。
1.3 旋翼振动
由于雷达是安装在直升机旋翼的上方,因此旋翼旋转时对俯仰波束位置影响是巨大的,图6选取某次飞行较为平稳的俯仰统计图,横坐标为CPI计数,纵坐标为角度值,o曲线代表俯仰码盘值,可以看出,由于振动原因,该曲线抖动较大,经统计,俯仰波位有±0.7°的抖动,振幅达1.4°很容易导致丢失目标。尤其是在高压线探测模式,丢失任何一组目标信息将使高压线规律性变差,以致无法区分地面静目标与高压线,最终导致无法连线,也就是说雷达并未检测到高压线。这无疑对雷达探测影响是巨大的,因此需要采取其它措施以减小波束抖动。
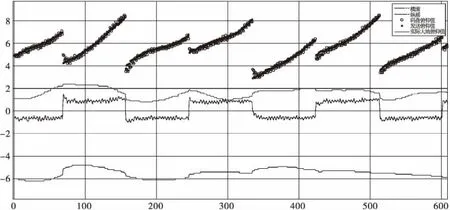
图6 旋翼振动示意图
2 坐标系转换
2.1 雷达相扫坐标转换[5]
1)地理极坐标系到地理直角坐标系的转换
极坐标系转换到直角坐标系示意图如图2所示,极坐标转换成直角坐标公式见式(1)。
2)地理直角坐标系到载机直角坐标系的转换
该转换涉及到偏航、横滚、纵摇三轴转换,在推导变换公式时,首先只考虑一种姿态的变化,另外两种姿态保持不变,先分后合,分别推导出公式后,再将各姿态同时变化时态综合考虑,进行叠加相乘。
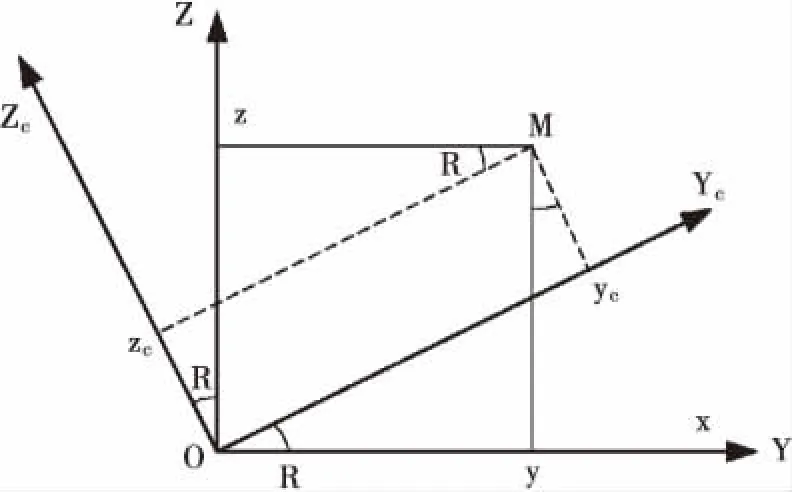
图7 仅考虑横滚角变化时的坐标转换
①横滚角R发生改变时,以上图所示,可认为是Y轴与Z轴绕X轴旋转,Y轴和Z轴转过的角度为R。设空间某点M在大地坐标系中为M(X,Y,Z)在载机直角坐标系中为MC(XC,YC,ZC),见图7。
Oyc=ON+Nyc
=Oy/cosR+(My-Ny)sinR
=Y/cosR+(Z-YtgR)sinR
=Y/cosR+ZsinR-sin2R·Y/cosR
(4)
Ozc=Myc=MNcosR=(Z-sinR·Y/cosR)
=-YsinR+ZcosR
(5)
用矩阵形式表示为:

②同理,仅纵摇角P发生变化时,可以认为绕X轴与Y轴绕Z轴旋转,X 轴和Y轴转过的角度为P。把Y →X;Z →Y; R → P; YC → XC ; ZC → YC。
同理可推出:
Oxc=XcosP+YsinP
(6)
Oyc=-XsinP+YcosP
(7)
用矩阵表示为
③最后,仅当航当角H发生变化时,X轴与Z轴绕Y轴旋转,X轴和Z轴转过的角度为H,则有
Oxc=ON+Nxc
=X/cos H+(Z-sin H/cos H)sinH
=Xcos H+Zsin H
(8)
Ozc=xcM=MNcos H
=(Z-sin H·X/cos H)cos H
=-Xsin H+Zcos H
(9)
用矩阵表示为

④综合上述推导的公式,当横摇、纵摇和航向角同时发生变化时
(10)
其中:

3)地理极坐标到载机直角坐标的转换
(11)
4)载机直角坐标系到载机天线极坐标系转换
天线直角坐标与天线极坐标之间的关系见图4所示。对式(2)做逆变换:
Ac=sin-1(ZC)
(12)
Ec=tg-1(YC/XC)
(13)
需要注意的是,当方位电轴为0°,也就是与载机纵轴线重合时,可以使用以上述坐标转换方法。
当雷达方位转台转动时,坐标转换更加复杂,使用公式(1)时,方位值使用相扫方位值加上电轴转台码盘值,在第3与第4步转换之前,需要做一次电轴坐标转换,下面给出公式。
XC′=cos(AXIS)·XC+sin(AXIS)·ZC
(14)
YC′=YC
(15)
ZC′=(-1)·sin(AXIS)·XC+cos(AXIS)·ZC
(16)
2.2 雷达机械扫描坐标转换
方位机械扫描坐标系转换与方位相扫坐标系转换相似,主要区别在于载机天线极坐标系到载机直角坐标系的变换。
对图1的变换公式(1)做其逆变换即可:
Ac=tg-1(ZC/XC)
(17)
Ec=sin-1(YC)
(18)
3 飞行试验效果分析
图8为机载雷达某次对地飞行实验时的俯仰波位统计图,图中,“o”表示俯仰回报的码盘值,原点“.”表示的是向伺服系统发送的俯仰角,“-.”曲线为载机的横滚角,“--”为载机的纵摇角度,最后实线条“-”表示为俯仰空间实际的指向值。
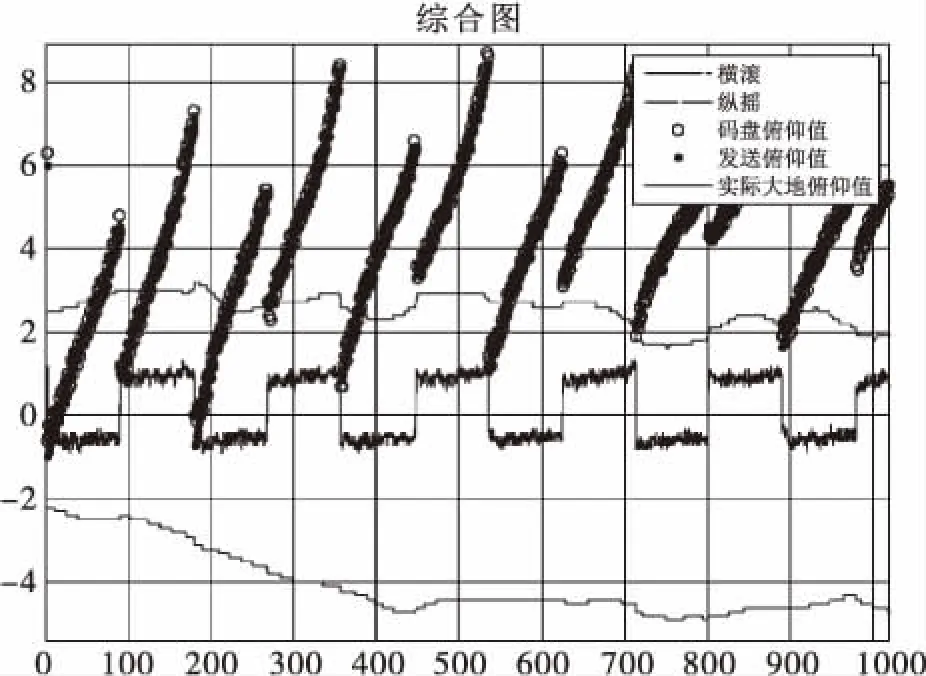
图8 相扫时俯仰波束补偿效果图
统计实际俯仰角度,容易看出,实线条所代表空间俯仰值,在一个小的范围内进行步进角扫描,步进角度为1°,与操控终端设定俯仰波位大体一致,说明空间波束补偿到位,其上下抖动是旋翼振动带来的,无法避免,整体补偿效果理想。
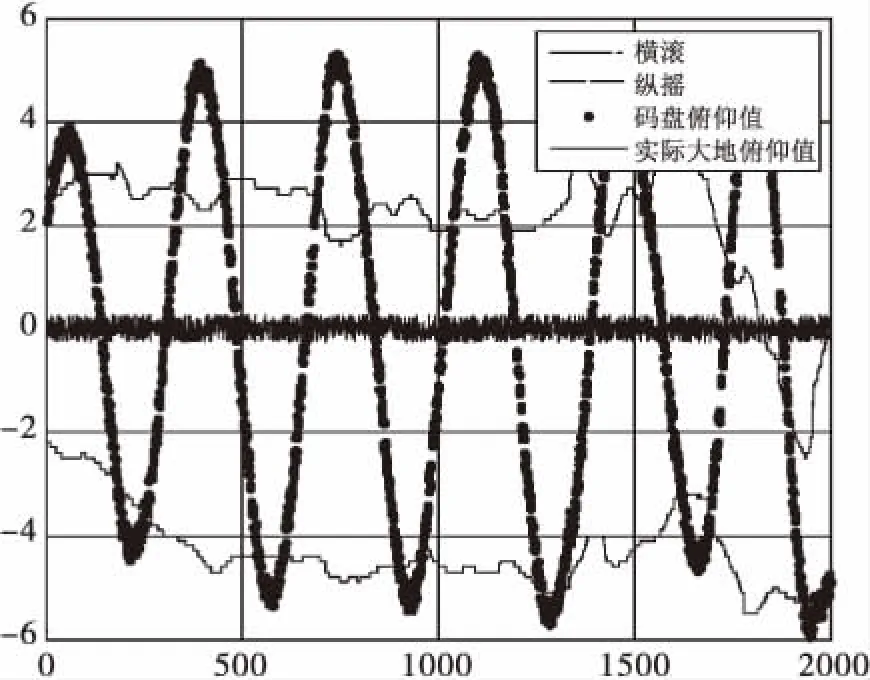
图9 机械扫描俯仰波束补偿效果图
图9为机载雷达在对空模式试验时的俯仰波位统计图,上图中,以“.”连接的曲线为俯仰码盘值,“-.”曲线为载机的横滚角,“--”为载机的纵摇角度,实线条“-”表示为俯仰空间实际的指向值。
可以看出,在载机极坐标系下,俯仰为正弦式扫描,统计实线条“-”线条,发现其值代表空间俯仰值,在0°的范围内抖动,为固定角俯仰角,与操控终端设定的俯仰波位吻合,意味着波束补偿基本到位。但是通过放大显示,发送的俯仰波位与回报的码盘值略有所差异,经过数学分析,实际统计俯仰码盘均值大于理论计算值0.2°左右,通过修正伺服俯仰指令值,消除该差异。
4 优化事项
1)应用公式时,需要注意, 在求方位角时,要用到反正切函数,这就有一个象限确定的问题。
2)由于伺服系统响应的滞后性,因此,波束稳定对于伺服控制需要有一个时间提前量,对于不同工作模式,对应的prf不同,造成工作周期不同,该时间提前量也不尽相同,并且不同批次的伺服系统,性能也有所差异,因此需要每一套伺服进行测试。
3)雷达在地面静止时,可选取具有代表性的飞机数据,进行模拟波束补偿,通过数采设备以及matlab软件,精心测试,测试出控制时间的最佳调整值,以达到最佳补偿效果。
5 结束语
上述分析表明,直升机载雷达的波束稳定,可通过任务计算机(中心机),实时进行坐标转换,将计算的波束补偿角,再发送给伺服系统,实现波束补偿。在实际飞行试验过程中,进行了精度测试项目,包含距离、角度、速度精度测试,在配试目标与载机加装了差分GPS系统,以两套GPS直接的距离、角度为真值,来验证雷达的性能,数采设备对飞行数据实时记录,通过中心机对录取的飞行数据进行分析,实际空间指向角与通过GPS统计的出角度值较为吻合,满足精度了测试要求,也间接的证明了直升机载雷达波束稳定方法的正确性。
