基于Creo的四轴机器人运动分析
2019-04-08文德刚相宁波
文德刚,相宁波
(山东临工工程机械有限公司,山东临沂276023)
1 引言
工业机器人主要是指具备多个自由度,由多个运动关节组成,专门用于工业行业的自动化设备,具有自动化程度高,定位准确,工作效率高等特点,按运动关节数量,工业机器人分为三轴、四轴、五轴等多种类型,本文研究对象为连杆式四轴机器人,主要用于码垛、分拣、搬运等行业。
2 基本原理
连杆式码垛机器人主要应用平衡吊的原理,主要结构包括底座(见图1),上部旋转组件和工作装置等部分组成,包含4个关节,其中,一轴为整体旋转,采用中空型RV减速器;二轴为末端装置上下运动,采用滚珠丝杠进行传动;三轴为末端装置水平运动,采用丝杠传动;四轴为末端装置旋转,采用中部输入型RV减速器。四连杆机器人的工作原理可以简化为简易相似三角形,并且当工作装置关节间尺寸满足特定关系时,机器人末端位置,于水平、垂直传动装置的位置呈线性相关,并且运动最平稳,振动最小。
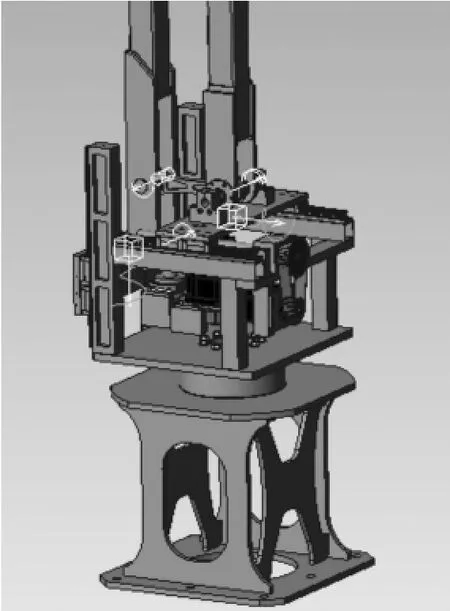
图1 机器人底座结构
3 主要研究对象
连杆机构通过销轴与水平滑板上的凸型块、垂直滑板上的耳座进行连接,其中,垂直滑板上耳座的尺寸对机器人运动范围有重要影响,因此,本文重点研究垂直滑板耳座销孔位置与机器人运动范围之间的关系。
经过前期计算,销孔与安装平面的距离范围为60~120mm,上下运动范围为[-50mm,330mm],考察水平滑块位于最后端位置时,短连杆与后动臂交点满足以下关系:以前动臂下销轴中心为原点,水平轴往后为X正方向,在后动臂下销轴位于(190,t)位置时(t为后动臂下销轴的Y方向坐标),短连杆与后动臂销轴中心位置D(x0,y0)满足以下条件:

4 软件分析
先在Creo Parametric的建模环境中添加测量,定义为后动臂与垂直滑板的角度,并将其保存为测量模型,然后切换到机构模块中,添加2个伺服电动机,伺服电机1将水平滑板的距离锁定为-110mm,设垂直滑板位置L,其中γ=[0,10](γ为使L满足[-50mm,330mm]的变量),运行仿真后,并测量中心距分别为60mm,80mm,100mm时的值,然后在同一个坐标系下绘制图形,得到结果如图2所示。
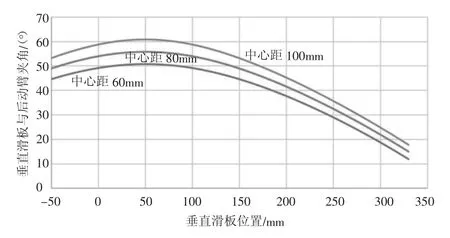
图2 垂直滑板与后动臂的角度随位置的变化曲线
经过对比分析,极值点均出现在滑板位置等于48.8附近,将垂直滑板的位置代入方程(1)中求解,得到点D坐标为(300,0)时,即当短拉杆位于水平位置时,后动臂与滑板间的角度最大。
结合垂直安装导轨和垂直衬板的厚度,最后得出,机械运动中,后动臂与垂直滑板的最大角度与配重耳座中心孔距离l的关系为
而根据机械结构,配重耳座与后动臂不发生干涉的最大允许夹角,以l为横坐标,绘制α和β的折线图,如图3所示。
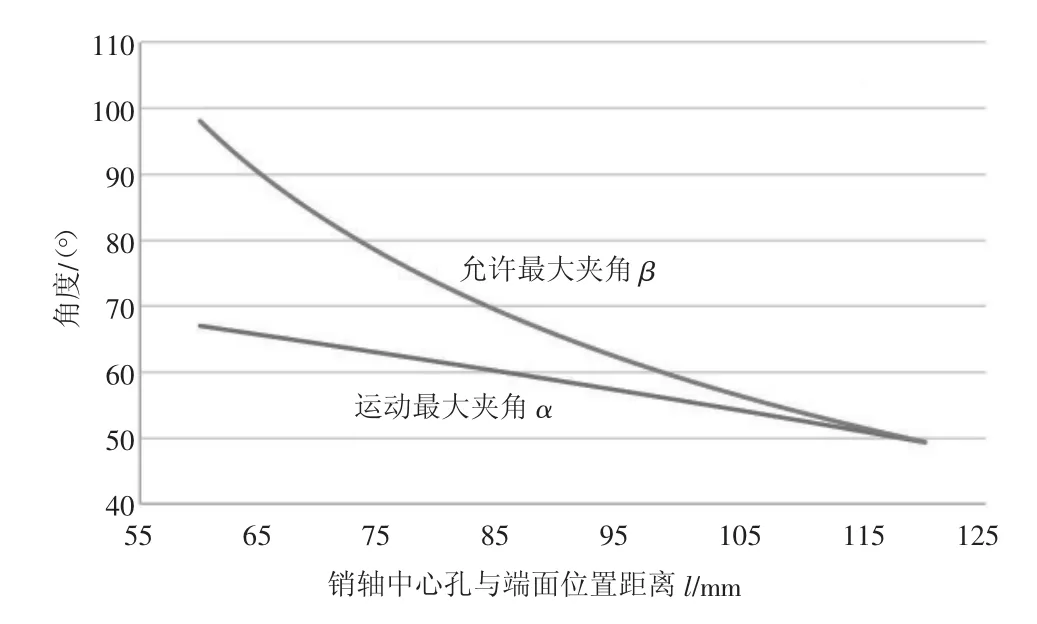
图3 夹角与距离的关系
从图3可知,在l>0范围内,α与β不存在交点(无限接近),因此,均按照β角度进行干涉分析即可。为保证机器人有相关的安全裕度,需要保证机器人在处于软件限位时,与极限位置留有15mm以上间隙,结合电机与后动臂的间隙,最终选择销轴中心孔与端面位置距离为80mm。
5 结果验证
最后,按照相关选定参数进行设计,并对实物进行测量,结果与软件仿真一致。
本文结合Creo三维建模与软件自带的机构模拟与仿真分析功能,在通过数学方法无法直接求解的情况下,首先利用软件仿真功能绘制相关参数变化曲线,分析极值出现位置,从而得出多参数优化问题的主要求解办法,最终结合实际需要得出最佳设计参数,对常见机器人设计具有指导意义。