GPS地面沉降监测应用与实践
2019-04-08赵明金徐杰孟黎
赵明金,徐杰,孟黎
(1.山东省国土测绘院,济南250102;2.山东城市建设职业学院,济南 250014)
1 引言
地面沉降在GPS沉降监测数据处理过程中,基准点及点位坐标基准的选择对于提高数据的处理精度和真实客观地反映监测点位沉降速率均具有十分重要的意义。基准点要求建立在稳定的基岩上,但由于地壳运动的存在,建立在基岩上的基准点同时也存在水平和垂直方向上的运动。鉴于此,选用稳定、高精度的动态三维地心坐标系,用于监测网点的数据处理是整个数据处理中十分关键的一步。本文主要研究了利用北京、上海、武汉3座IGS站作为沉降监测网中的基准点,联合沉降监测网中的监测点在ITRF2008框架下统一平差,从而确定各监测点位的高精度垂直变化分量,得到点位的沉降值。
2 ITRF2008的实现
国际地球参考框架即ITRF,是指国际地球参考系(ITRS)的一种具体实现,ITRF是基于VLBI、LLR、SLR、GPS和DORIS等空间技术所建立起来的现代全球地面参考框架,它提供了一个全球统一的、地心的、三维的和动态的高精度地面坐标参照基准,并广泛应用于全球范围内精密定位、地壳形变监测、地球动力学研究等。当前常用的框架种类包括:ITRF2000、ITRF2005 和 ITRF2008[1]。
2.1 ITRF2008
ITRF2008的实现是基于VLBI、SLR、GPS和DORIS 4种空间测量技术联合重新处理后而得,该4项技术观测时间跨度分别为29年、26年、12.5年和16年。其原点定义为在历元2005.0时ITRF2008与ILRS的SLR解的平移参数及其速率为0;尺度定义为在历元2005.0时ITRF2008与相对于VLBI和SLR时间序列的平均尺度及尺度变化率为0;定向定义为在历元2005.0时ITRF2008相对于ITRF2005选转参数和旋转速率为0[2]。
2.2 ITRF2008与其他框架的比较
相对于ITRF2000,ITRF2005在基准定义和实现方面均做了进一步的完善和调整。尤其是二者差异造成的测站坐标差在毫米级(ITRF2000与ITRF2005的差异对GNSS数据处理的影像),对高精度GPS数据处理存在一定影响[3]。
虽然ITRF2005相对ITRF2000有所改进,但在内部一致性和稳定性方面存在明显缺憾。相对于ITRF2005,ITRF2008采用新的绝对相位中心偏移模型(IGS08)、新的重力场模型(EGM08)、卫星及测站的变化模型、天线温度形变等改正,这些策略的采用证明了ITRF2008的性能高于ITRF2005,因此,采用ITRF2008框架数据解算时基线重复性分布更合理,解更趋于稳定。
3 应用案例
东部沿海某地区由于长期超量开采地下水,已导致地下水位大幅度下降,进而诱发地面沉降、裂缝等地质灾害。为确保当地经济建设和经济社会发展需要,及时向有关部门提供沉降资料,系统全面掌握地面沉降数据,从2008年开始,进行GPS沉降监测,每年观测一期。
3.1 布网
沉降监测网点包括基准点和监测点2部分。基准点由北京、上海、武汉3座IGS站组成,如图1所示。
监测点位的标石选址都选在该地区具有代表性的地质环境区。共计布设18点位(见图2)。点位建设参照B级GPS点建设规范。
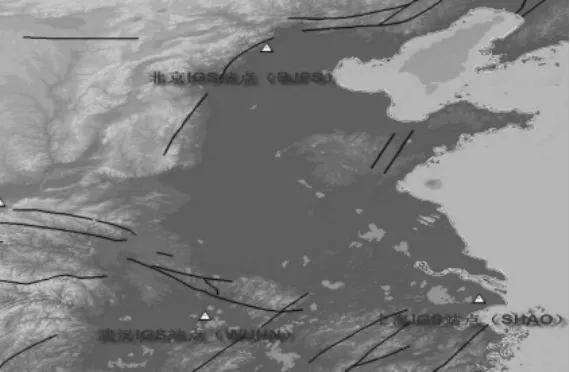
图1 基准点分布图
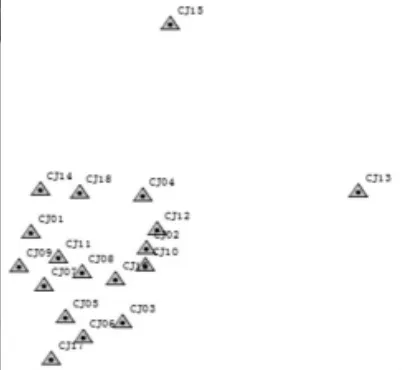
图2 监测点位分布图
3.2 基线解算
数据基线解算软件采用GAMIT(10.4)。精密星历采用IGS最终星历。经计算统计,每天解的NRMS值均小于0.2,基线绝对中误差均为毫米级,相对中误差最小值在10~9量级,最大值在10~7量级,大部分数值保持在10~8量级,由于基线过多,在此不做统计表述。
3.3 平差
网平差软件采用武汉大学GPS工程技术研究中心研制的POWERNET,平差时以GAMIT的结果O文件为输入文件,采用同步观测网的独立基线向量及其全协方差矩阵作为观测量。
3.3.1 参考框架
参考框架选用ITRF2008,每期数据处理历元如表1所述。

表1 各期数据处理参考历元
3.3.2 起算坐标选择
在综合评价SOPAC、ITRS官网发布的ITRF2008下的坐标值及速度场换算后所得到观测历元的坐标值后,发现精度不是十分理想,垂直方向上精度能降低0.5~4mm。因此,最终选择了瑞士BERNE大学发布的全球IGS站周解作为沉降监测网的起算数据。
3.3.3 平差精度评定
经计算统计后,各点位垂直方向大地高U及点位中误差RMS(U)如表2所示,除个别点位外,其余点位中误差均优于3mm,精度较高。
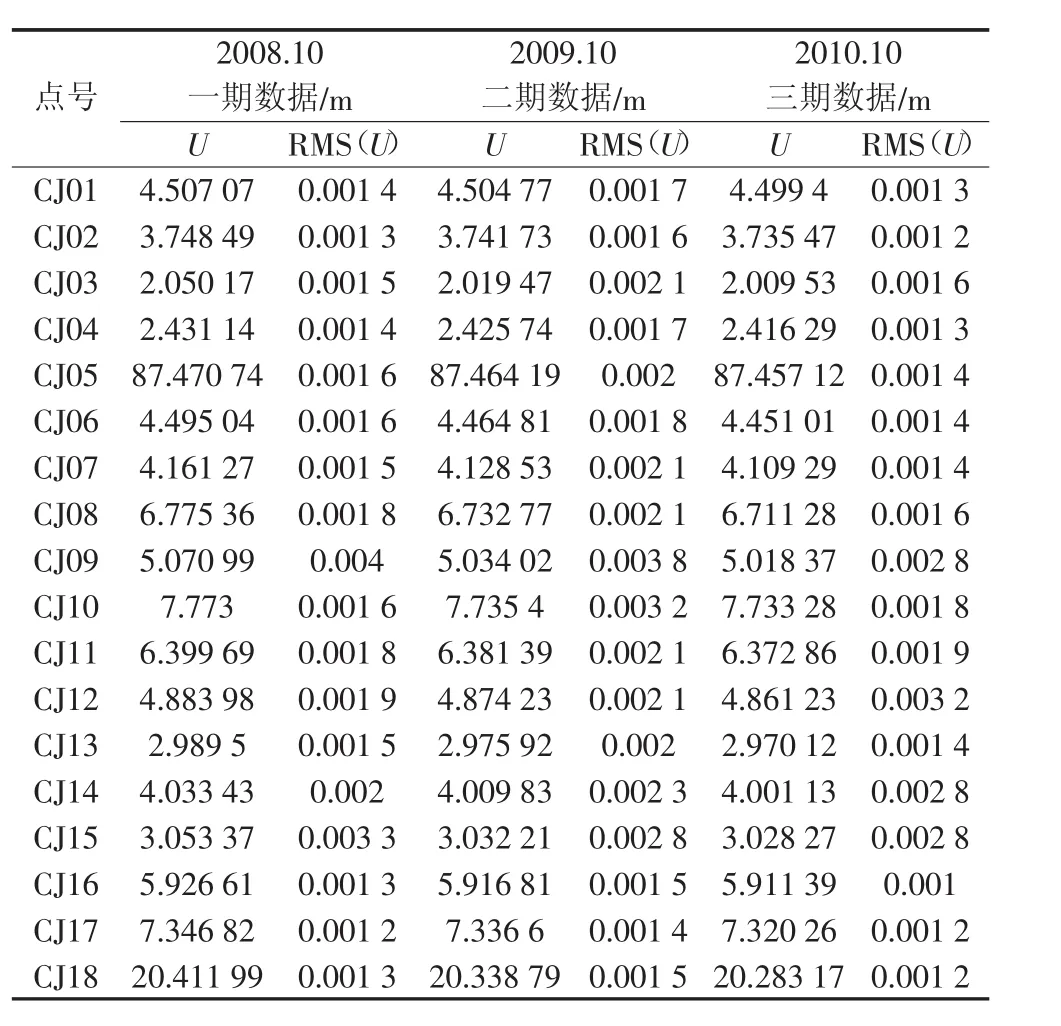
表2 每期数据点位大地高及垂直方向上中误差
4 结论
对GPS精密数据进行处理,并统一采用ITRF2008框架数据解算,可以得到优于2mm精度的大地高,可以对亚厘米及厘米级的地面沉降进行有效监测。