一种多节点声呐阵列在船舶水下安检系统中的应用∗
2019-03-27陈孟君仝志永
陈孟君 仝志永 曹 仲
(1.中国船舶重工集团公司第七一О研究所 宜昌 443003)
(2.中国长江三峡集团公司三峡枢纽建设运行管理局 宜昌 443133)
1 引言
另据了解,也有一些自航货驳船为了防止因船舶碰撞或搁浅对船体造成损坏,在船舶底部安装有护底板,主要是用于保护船舶底部的舵叶和螺旋桨。护底板大都安装在舵叶和螺旋桨下部,并与船舶底部牢固地焊接,这些护底板一般突出船底龙骨0.4m~0.5m,结构坚固,当船舶出现搁浅时,这部分装置首先搁浅,从而造成整个船体搁浅,对航道的破坏影响非常大[2]。
另一方面,随着国际战略形势的变化,敌对冲突模式也在不断发展。“9.11事件”的发生,彻底改变了传统意义上的恐怖袭击方式,多元化、隐蔽性的特点日趋突出。江河大坝和港口是我国重要的大型水利设施,来往船舶众多。目前,该类区域虽拥有完善的陆上和水面安全检查措施,但船舶水面以下部分的安检手段极度匮乏。恐怖分子控制民用船舶后,一旦将水下爆炸物放置在船舶底部水下,就可能顺利通过现有的水面安全检查,对该类设施发动恐怖袭击,引起经济损失、造成恶劣的政治和社会影响。
此外,船只通过船底非法夹带或拖带走私物品,现场肉眼不易发现,往往容易躲过海关缉私部门的检查,给国家造成较大的经济损失。
鉴于此,了解并开展船舶的水下安检方面的工作是十分有意义和必要的。
2 船舶水下安检的发展现状
船舶水下安检主要包括船舶吃水检测、船舶水下拖带物或船底附着危险物等几个方面。
对于船舶吃水检测,目前检测手段主要有人工检测和自动检测两种。人工观测船舶吃水线标尺读数是人工检测船舶吃水量的主要方式。检测时,被测船舶需要保持相对静止状态,测量人员登船测量或是乘坐检测用小艇靠近被测船舶测量。测量人员需要分别读取被测船舶左右舷船首、中、尾共六处吃水线标尺的读数,然后据此计算出被测船舶的实际吃水量,该测量方法有很大的局限性,已经不能适应当前需求。首先,其容易引入主观误差。第二,天气条件不好时,或水尺被侵蚀、氧化引起磨损、脱落,或受到泥砂、油垢污染时,字符很难辨认。第三,对于水尺不准确、故意画小水尺,以及有些船舶在船底安装护板,现场无法观测等情况,工作人员不能掌握真实吃水数据。第四,船舶需靠岸检查,耗费大量时间,影响通航效率[3]。
目前除了人工检测外,常用于船舶吃水自动检测的技术手段大致包括以下几种[4~5]:
津保桥为新建天津至保定铁路工程,右线跨津保铁路特大桥,跨越西外环河及西外环,主桥上部结构类型为有砟轨道矮塔斜拉桥。孔跨布置采用(84+56+32)m矮塔斜拉桥方案,结构体系为塔墩梁刚结的结构体系,膺架现浇施工。主梁全长172.4 m,主墩桥墩高24 m,主墩处梁高6 m,塔高20 m,最小净空22 m,跨外环桥处最大净空12.9 m。
1)超声波测量法:超声波传感器阵列测量就是依据超声波测距原理,以船体舷边甲板为基准测量船舶吃水,通过测量超声波回波返回的时间,根据当时当地声速,测得船体主甲板至水面的距离等参数,计算出吃水值;
2)压力传感器测量法:此方法是在船舶空载吃水线上安装压力传感器,当船舶装载货物下沉时,根据压力传感器的信号反馈得到吃水量数据。该方法原理简单易实现,但是压力传感器安装在船体外侧,工作环境非常恶劣,容易导致仪器损坏,得不到准确吃水数据;
3)激光测距测量法:测量原理类似于超声波测量,利用光速的不变性,通过测量激光束往返的时间,间接获得当时的水位信息;
4)电子水尺测量法:就是利用水的导电性,采用类似于人工观测水位的方法,它是自上而下依次读取每个感应触点(即探针)的电导,在探测到探针和水面接触的位置,探针间的电导会突变增大从而确定水位值,该方法由于探针及电路直接与水接触,较易被损坏,适应性较差;
5)图像识别法:基于图像处理技术,对水尺刻度进行识别,即利用摄像机拍摄船只水尺,并利用相应算法对拍摄图像进行识别和处理,进而得到吃水深度。该方法设备简单、造价低,可代替人工观测实现无人化不间断监控。但该方法仍依赖于水尺准确程度和清晰度,且当船舶姿态不正时,测量误差较大。
上述几种检测方法或依赖船舶的吃水线标记,或需要安装在船上,无法满足船舶吃水离船快速检测的要求。当这些设备安装在船体上时,设备的管理及其维修与船员的能力有很大关系,其检测效果受船体、船速的影响较大,其检测结果的可靠性受人为因素影响。所以,从某种程度上讲,这些检测手段并不能满足船舶监督管理和船舶吃水控制现实的需要。经文献查询可知,目前国内已有相关单位开展过多波束用于船舶吃水及超载检测方面的应用研究[6]。
另外,对于船底水下拖带物检测,文献[7]提出了一种“反走私水下取证系统”,该系统主要包括安装于缉私艇上水下机器人和探测声呐,能够对改装过的船只进行识别,对船底走私物进行检查和辨识,达到现场取证,打击走私的目的。文献[8]提出了一种利用多波束扫描船底的水下安检系统,该系统主要包括多波束和水下浮动平台等,多波束安装在水下平台上朝水面发射,对通过的船只底部进行扫描检测,形成船底图像,可对船底异物进行有效检测。
综上分析,采用常规的光学或其他测量方法难以可靠和高效地对船舶吃水及船底情况进行检测,而声探在水中是唯一有效的信息载体,可快速高效地完成船舶水下安检工作,本文接下来将要介绍一种多节点声呐阵列在船舶水下安检系统中的应用。
3 多节点声呐阵列
3.1 系统组成
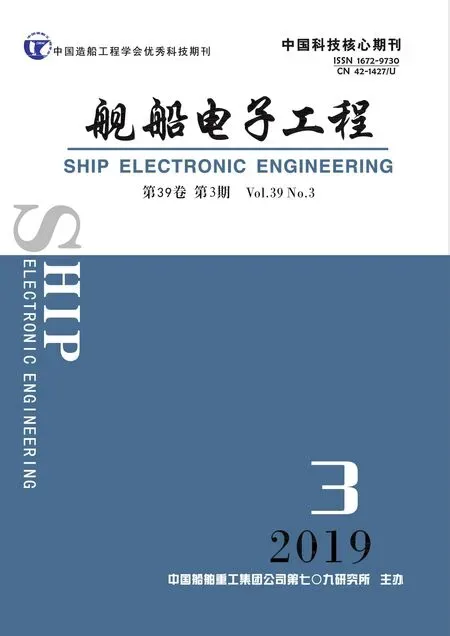
多节点声呐阵列系统主要包含多组声呐阵元、数据传输链路、数据转发器、电缆组件及岸上综合处理机,声呐阵列由若干个水下声呐阵元串联组成,每组声呐阵元里包括若干个(如3~5个)单波束声呐头,声呐头安装越密,系统探测分辨率越高,声呐阵列数量越多,水面探测范围越宽。
声呐阵列系统安装在水下平台上,平台布放在安检区域航道水下固定深度,采用多组声呐阵元摆成一定长度呈直线并行安装的方式,当受检船只从其上方通过时,声呐阵列系统对经过的船只水下部分进行扫描,声信号遇船舶底部反射被阵列接收,声呐扫描的原始数据通过复合缆上传至岸基站的水上综合处理机,经数据图像处理后能得到船只吃水及船底三维图像信息[9]。
系统工作示意图见图1。

图1 声呐阵列系统工作示意图
3.2 基本原理
在多节点声呐阵列系统中,单个声呐头完成在一个窄波束范围内的声脉冲发射,接收回波进行信号调理和采集,将结果数据打包通过数据传输链路送到水上综合处理机进行图像信号处理和显示。声呐头工作频率在600kHz~700kHz之间,每个声呐头具有独立的地址,岸基站水上综合处理机通过数据传输链路的下行指令控制声呐头的工作状态,相邻的声呐头采用分时工作,避免了相互干扰。3~5个声呐头组成一组声呐阵元,包括换能器、水密壳体,以及声呐阵元两端的水密连接缆和装在声呐阵元内部的信号处理及通信单元[10]。
根据声呐数据容量和传输速度及系统的多节点数据传输特点,数据传输链路采用了LVDS传输的方式。LVDS是一种小振幅差分信号技术,也是一种为满足高性能数据传输应用的新型技术。它具有传输速度快,功耗低,抗干扰能力强,传输距离远,易于匹配等优点[11~12]。
声呐阵列数据传输链路见图2所示,其功能是完成命令、状态数据和声呐数据的传输。数据传输链路包括数据传输模块、数据转发器和水上综合处理机等。
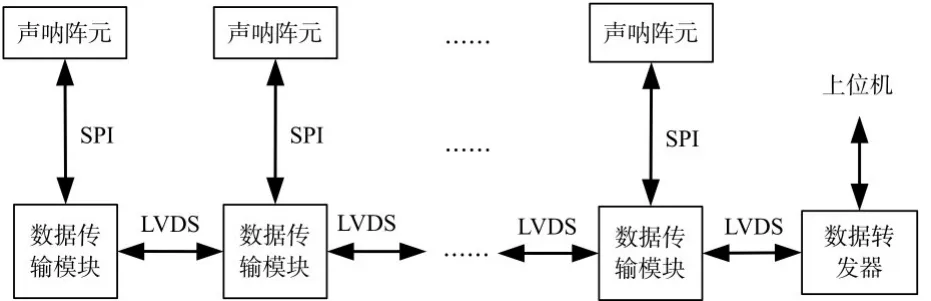
图2 数据传输链路示意图
数据传输模块是数据传输链路的核心,每个数据传输模块包括接收本地声呐阵元的数据、上一个数据传输模块的LVDS数据,数据处理和将数据传送给下一个数据传输模块。数据传输模块的核心处理器采用了现场可编程门阵列(FPGA),主要实现本地声呐阵元声学数据的接收,前端数据传输模块的数据输入、数据处理和把相关的数据送给下一个数据传输模块。前端数据传输模块输出的差分LVDS信号经过差分和串并转换后,通过并口送给FPGA进行数据校验,确认无误后再由FPGA的发送模块进行并串转换、发射均衡和差分驱动后发送给后端数据传输模块,数据传输模块结构框图见图3。
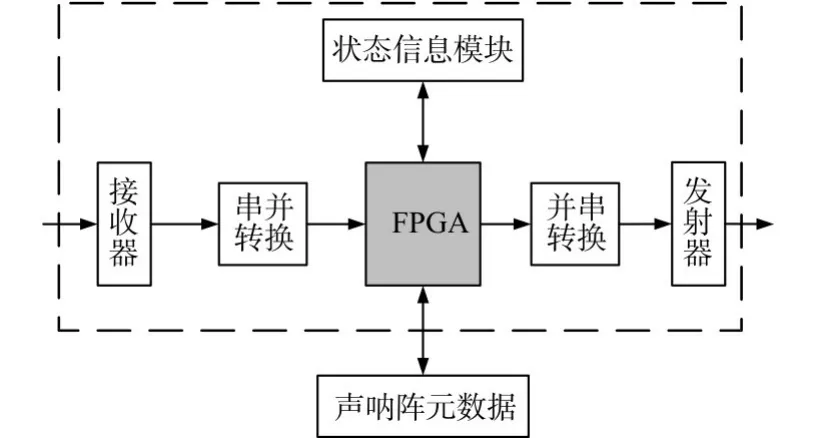
图3 数据传输模块结构框图
数据转发器的主要功能是除了给各声呐阵元供电之外,还把各个数据传输模块输入的数据转换成网络信号,通过光纤传送到水上综合处理机。岸基站水上综合处理机通过光纤接收声呐头采集的数据,完成每个声呐头声学信号和声学图像处理,并根据声呐头地址和安装位置的对应关系,将所有单个声呐头的扫描信息进行融合,显示扫描到的完整图像。
4 试验结果分析
本文所述的多节点声呐阵列经过了多次湖上和长江实船试验验证,试验结果表明,由声呐阵列扫描船底测量得出的结果与真实船只情况相符合。当然,测量结果会因为船只通过速度、螺旋桨转动情况及船只艏向偏移等因素存在一定的误差,通过控制船只低速通过安检区,测量误差大大减小。图4为湖上试验船只通过声呐阵列上方时在某个时刻船只截面的吃水情况实时效果图,由图中可以看出该时刻船只断面轮廓的吃水状态及深度信息,整个船只完全通过之后,即可获得船底完整图像信息和吃水深度信息。
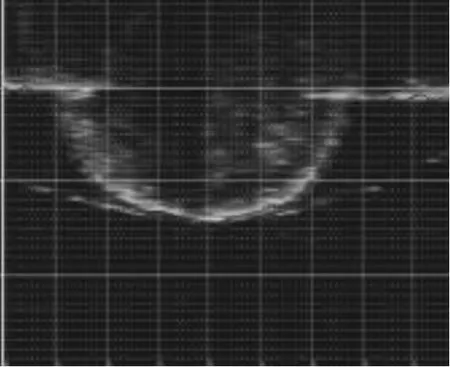
图4 湖上试验测试吃水实时结果
除了可以检查船只吃水状态之外,系统可以通过功能扩展和升级,融合船速、扫描频率、声呐阵列姿态等数据将船底横断面外轮廓图像合成,形成完整的船底三维图像,用来检查整个船底情况,可实时检测到船底异常。
通过进一步实船试验验证,在船底未携带目标物和携带目标物的情况下,船只先后通过声呐阵列上方,分别得到图5和图6所示的实测船底效果图。图5为船只底部未携带任何目标物从阵列上方完全通过时的扫描效果图,从图中可以看出船底比较干净,无异物。图6为船只底部携带目标物从声呐阵列上方完全通过时的扫描效果图,图中船底圆圈标记内目标即为探测到的目标物,图中左上角为水下相机拍摄的放置于船底的水下目标实物照片。

图5 实船测试效果图(船底无模拟目标)
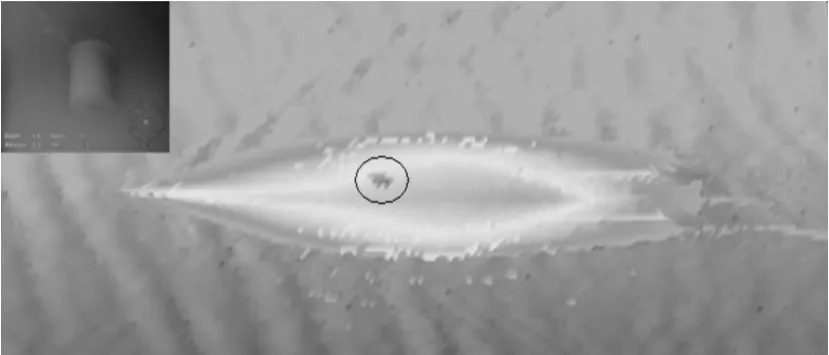
图6 实船测试效果图(船底有一个模拟目标)
5 结语
针对船舶水下安检技术现状,本文分析了几种船舶吃水检测技术的应用特点和技术特性,介绍了一种应用于船舶水下安检的多节点声呐阵列系统,开展了湖上和江上实船通过试验测试。该系统可望建设成一套自动、智能、集成、高效的船底测量和报警系统,既能自动测量通过船舶的吃水信息,又能测量船舶水下部分形状,自动提取船舶的吃水深度信息,对发现的“超吃水”船舶自动报警。从而消除船舶“超吃水”给船闸等通航建筑物和水上交通造成的安全隐患,切实保护航道资源;同时还能发现船底异常,能有效检查船底走私物品或携带危险品,协助海关缉私取证或海事部门船底异物检查,实现陆上人员肉眼无法完成的安检任务,具有重要的意义。