车载伪距单点定位的卡尔曼滤波算法研究
2019-03-24彭小强余学祥陈卫卫徐蒋林吴梦皎
彭小强,余学祥,陈卫卫,袁 蹈,徐蒋林,吴梦皎
(1.安徽理工大学测绘学院,安徽 淮南 232001;2. 安徽理工大学矿山采动灾害空天地协同监测与预警安徽普通高校重点实验室,安徽 淮南 232001;3. 安徽理工大学矿区环境与灾害协同监测煤炭行业工程研究中心,安徽 淮南 232001)
随着交通行业的发展,高精度应用需求加速释放。导航定位系统助力交通运输行业信息化和现代化,掌握精确的车辆位置信息和速度信息,推动车辆自主导航、跟踪监控、精密进近。伪距单点定位技术因算法简单,数据处理方便,实现定位的速度快,在不考虑地形遮挡的情况下不受距离的限制,在车载导航定位中应用较广。但当观测环境较差时,单一的GPS或BDS定位系统在卫星可见数、有效观测时段、定位精度方面均有所降低,此时对于北斗/GPS融合定位系统可以很大程度增加卫星可见数、有效观测时段和改善卫星的几何分布情况,提高车辆在复杂环境下的导航定位可用性[1-2]。
伪距单点定位通过最小二乘估计算法解算的结果相互独立,没有将前后时刻的定位信息联系起来。Kalman滤波的主要功能是联系系统相邻时刻的状态信息(如位置、速度、温度等),过滤可能的负面成分,使不同时刻的状态信息相互关联,使滤波结果显现为平滑、准确,可以克服最小二乘解算结果相互独立的问题[3-4]。
本文重点阐述了车载伪距单点定位的原理,构建其数学模型,通过最小二乘算法和Kalman滤波算法分别解算车载静态数据和动态数据,统计分析两种算法所得到的结果,进行精度比较,讨论该算法的实用性及可靠性。从导航定位的角度出发,分析该算法在运载体系统潜在的推广价值。
1 车载BDS/GPS伪距单点定位函数模型
1.1 BDS/GPS系统的时空统一
双系统定位中,因系统间存在时间基准和坐标基准的差异,需进行时间和坐标的基准统一。
1)时间系统统一。GPS时(GPST)是GPS系统使用的时间系统,秒长采用国际原子时AIT的秒长,时间起点为UTC(协调世界时)1980年1月6日0时。BDS时(BDT)是北斗系统使用的时间系统,同GPST一样使用原子时,时间起点为2006年1月1日UTC0时。由于两个系统时间维持的差异,BDT与GPST有14秒的整数差和非常细微的同步误差。由于本文仅研究伪距单点定位,因伪距观测值和广播星历的精度不高,导致融合系统的定位精度较低,因此仅需考虑14秒的整数差,不考虑细微的同步误差[5]。
2)坐标系统统一。GPS系统采用WGS84空间直角坐标系(World Geodieal System-84);北斗系统采用CGCS2000坐标系(China Geodetic Coordinate System 2000)。由于北斗系统与GPS系统仅在椭球扁率f有微小变化,两种参考椭球十分接近。由扁率f引起的椭球面上坐标变化的最大值为0.105mm,其值远低于导航定位的系统误差,可忽略其对定位的影响。因此,也不进行系统间的坐标转换。
1.2 车载伪距单点定位原理
BDS/GPS伪距观测方程可表示为
(1)


(2)

(dX,dY,dZ)为测站三维坐标改正数。双系统中单点定位的平差参数共有五个,三个方向上的坐标分量和两个系统的接收机钟差参量。对(2)式利用最小二乘平差算法可求解出测站三维坐标和两个系统的接收机钟差。
其中,伪距观测值中的对流层延迟通过简化的Hopfield模型改正,电离层延迟通过8参数Klobu-char模型改正,观测值通过卫星高度角进行定权,两个系统下的观测值视为等权。
2 卡尔曼滤波原理
目前卡尔曼滤波技术已熟练运用于导航、控制、监测和传感器数据融合等技术领域。对车载伪距单点定位进行解算时,以接收机在WGS-84空间直角坐标系中的三维位置、三维速度、接收机钟差及其钟速为状态向量[9-10]。则车载伪距单点定位的Kalman滤波数学模型为

(3)
Lk+1=Bk+1Xk+1+vK+1
(4)

DX(k+1/k+1)=(E-Jk+1Bk+1)DX(k+1/k)
(5)
其中,E为单位阵。
给出Kalman滤波计算过程的递推公式:
X(k+1/k+1 )=X(k+1/k)+Jk+1[Lk+1-Bk+1X(k+1/k)]
(6)
DX(k+1/k+1)=(E-Jk+1Bk+1)DX(k+1/k)
(7)
其中
X(k+1/k)=φk+1,kX(k/k)
(8)
(9)
DV(k+1/k)]-1
(10)
式中:X(k+1/k)为一步预测值,DX(k+1/k)为一步预测方差矩阵,Jk+1为状态增益矩阵,D为系统动态噪声方差矩阵,DV为观测噪声方差矩阵[10]。本文给出的D、DV的定义如下
(11)
(12)

3 算例分析
3.1 静态实验分析
为考察讨论本文提出的车载伪距单点定位算法的可靠性与实用性,以2018年4月19日安徽理工大学国家重点实验室前广场的观测数据为基础,并同期进行了静态网型的观测。对该点进行伪距单点定位, 取其中8:15~10:15分的数据,高度截至角为15°,采样率为1s。采用最小二乘算法和kalman滤波算法对观测数据进行处理,对结果分别进行GPS、BDS单系统和BDS/GPS融合系统下与该点经过外业质量检核及空间无约束平差后质量合乎相应等级要求的真实三维位置进行比较(以下称为真实值),定位结果如图1所示,图1为最小二乘与kalman滤波处理的结果与真实值在N、E、U方向上的偏差。

图1 两种定位结果的比较
图1可以看出,kalman滤波处理后坐标分量的波动较最小二乘处理的结果明显变小,精度更高;其中N、E方向上的滤波效果均优于U方向上的滤波效果;滤波的结果与真实值更接近,算法可靠性更好。表1为两种算法解算的结果与真实值差值的均方根误差(RMS值)。由表1计算出的RMS值的结果可知,GPS和BDS/GPS融合定位系统的定位精度均较高,GPS更优;可能的原因是北斗系统的GEO卫星多路径效应的影响,使融合系统的精度变低[11]。相较于用最小二乘算法求出的结果,kalman滤波后求出的均方根误差值在N、E、U方向上均有所降低,其中N方向精度分别提高22.8%、26.4%、19.8%(从左到右分别为GPS、BDS、BDS/GPS),E方向精度分别提高18.6%、23.3%、22.9%,U方向精度分别提高10.1%、7.5%、9.9%。但因为观测值噪声、多路径效应等的影响,使滤波的后的结果与真实值仍有一定的偏差,无法使用本文提出的算法进行改正或去除。

表1 不同系统下均方根误差值 m
3.2 动态实验分析
动态试验为2018年12月20日安徽理工大学国家重点实验室门前至谢桥矿区行政楼的车载动态试验,数据取其中1h30min的数据(7:00~8:30/GPS时),接收机为中海达V9 R型接收机,采样率为1Hz。图2为车辆运行轨迹总览图,图3为最小二乘解算的坐标值和利用天星北斗厘米级定位终端解算出的参考值在google地球上的局部细节图,其中绿色为最小二乘解,黄色为厘米级定位终端解。图4为最小二乘解与kalman滤波后与参考值在N、E、U方向上的偏差,表2为计算出两者的RMS值。

图2 运行轨迹全览图
(a)

(b)图3 动态车载定位细节图
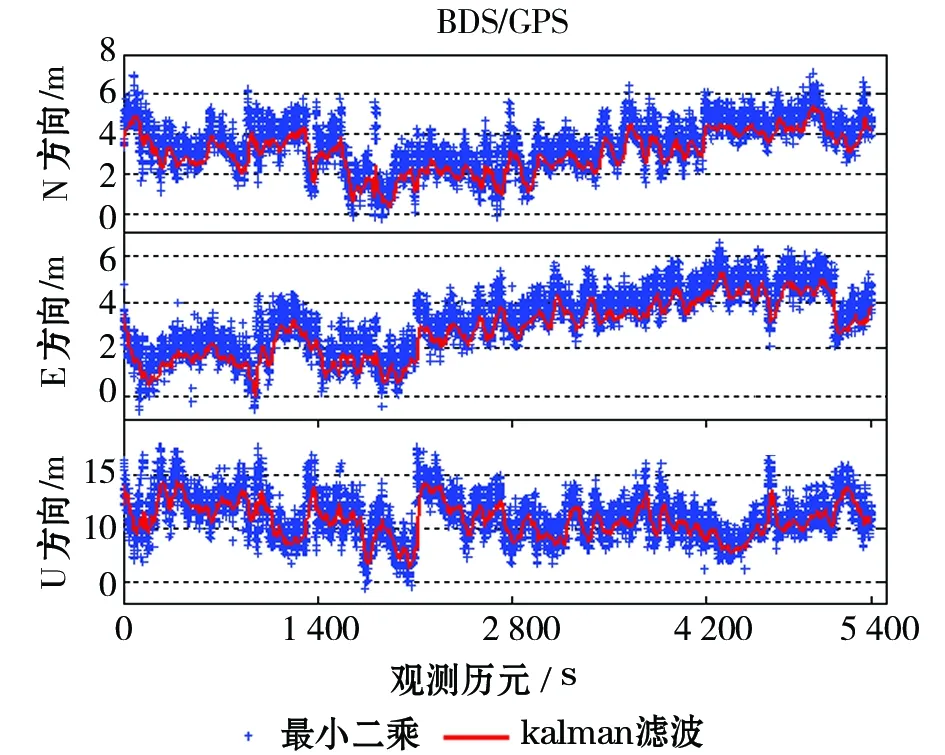
图4 最小二乘与滤波后精度对比
由图2、图3、图4可知,本文提出的基于Kalman滤波的车载双系统伪距单点定位算法满足车辆(运载体)在道路上的定位需求,定位基本无偏移现象;kalman滤波后的结果比最小二乘解算的结果精度更高,在N、E、U方向上偏差值更加平滑且无明显跳跃、定位结果更加可靠;其中N、E方向上的滤波效果均优于U方向上的滤波效果。由表3可以得出,kalman滤波解算的结果在N方向精度提高13.4%,E方向精度提高13.2%,U方向精度提高4.6%。
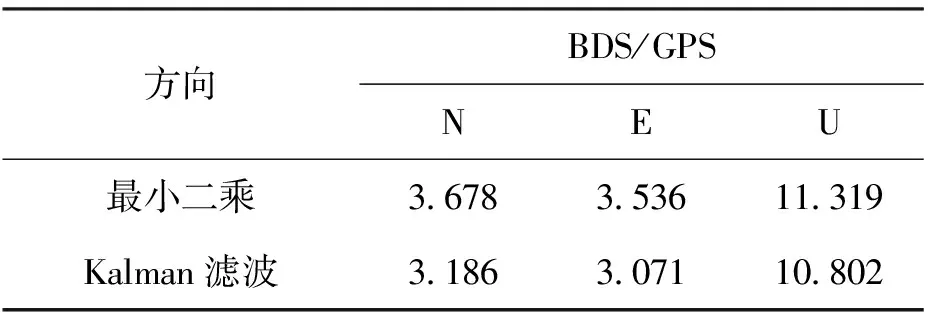
表2 动态融合系统下均方根误差值 m
4 结论
本文通过利用最小二乘算法和kalman滤波算法对两次实验数据处理结果的分析统计,可得出结论:
(1)本文提出的基于Kalman滤波理论的车载北斗/GPS伪距单点定位精度较高,解算结果更加稳定平滑,通过kalman滤波可进一步提高车辆伪距单点定位的精度与可靠性。
(2)通过kalman滤波算法与最小二乘算法处理的实验数据做对比,静态试验表明卡尔曼滤波处理的结果明显比最小二乘的结果更平滑,在N、E、U方向上坐标分量的波动更小,精度均有所提高;其中N、E方向上的滤波效果均优于U方向上的滤波效果;滤波的结果与参考值更加接近,算法可靠性更好。动态试验表明kalman滤波后的结果比最小二乘解算的结果精度更高,在N、E、U方向上偏差值更加平滑且无明显跳跃,削弱了测量噪声;其中N、E方向上的滤波效果均优于U方向上的滤波效果;滤波后结果与参考值更接近,定位结果更加可靠。
(3)基于kalman滤波的车载BDS/GPS融合定位系统算法满足道路上车辆的定位需求,定位基本无偏移现象,但在通过隧道、高架桥、丘陵等对GNSS测量有信号遮挡、信号干扰的地方本文未进行探讨分析;正常环境下,对于精度要求在米级范围的运载体系统均可以推广使用。
需要指出,本文仅就安徽理工大学国家重点实验室门前至谢桥矿区行政楼的试验环境下采集的数据进行分析,尚不能覆盖车辆实际运行中的所有环境,因此还需要进行更多科学客观的实验环境进行统计分析,检验算法在不同环境下的实际应用效果。
