载波和多普勒平滑伪距算法在智能手机单点定位中的应用
2022-07-23王成呈
王成呈
(1.中国矿业大学环境与测绘学院,江苏 徐州 221116;2.中国矿业大学江苏省资源环境信息工程重点实验室,江苏 徐州 221116)
0 引 言
伪距单点定位(Standard Point Positioning,SPP)技术无需提供参考站数据且算法简单、易实现,是当前智能手机卫星定位的主流技术。随着智能手机的更新换代,手机端的定位芯片也在不断迭代,并逐步支持越来越多的GNSS(Global Navigation Satellite System)系统及信号频点。
2016年,Google公司发布了支持设备输出GNSS原始观测数据的Android7.0版,研发人员能够通过开放的API接口获取GNSS原始观测数据,在此基础上进行算法优化以获得更加稳定精准的定位性能[1]。此次更新为学者和开发人员创造了更多条件和空间,可进行更深入的导航定位应用二次开发。基于安卓智能手机提供的GNSS原始观测数据,可对GNSS观测信息资源进行充分利用,并通过算法优化,获得更为精确的定位结果。
本文基于手机端的GPS/BDS组合系统观测数据进行算法优化。针对手机端伪距测距精度较差问题,利用精度较好的载波相位和多普勒观测值进行平滑伪距处理,提高伪距测距精度。
1 伪距单点定位原理
SPP利用伪距观测值计算接收机位置,其定位精度受到伪距观测结果随机误差和多路径误差的影响。智能手机GPS/BDS双系统伪距观测方程表现形式如下:
(1)
(2)

(3)
(4)
可以用以下方式来表示第i颗卫星的星地距离:
ρi=
(5)

(6)
(7)
将公式(6)代入公式(3)和(4)可得误差方程:
(8)
(9)
式中,未知量为vj,待估参数包含接收机位置参数、接收机钟差修正和GPS/BDS系统间时间误差修正。这时,对应的待估参数向量为:
(10)
利用最小二乘法进行参数估算,假定在一个历元内观测到n1颗GPS卫星,n2颗BDS卫星,则该模型的观测系数矩阵如下:
(11)
在这一历元,观测值与近似值之间的差异向量是:
(12)
这时,已经介绍了利用最小二乘平差进行伪距单点定位的全部内容,根据给出的公式,即可计算出当前智能手机的三维位置。
通过伪距观测值进行实时动态定位,可以避免求解模糊度和处理周跳等问题,单历元解算即可获得精度能满足大多数导航用户需求的定位结果。但是伪距观测值容易受多路径效应、非视距和信号遮挡等影响,使得在复杂场景下利用伪距进行动态定位的效果较差。由于手机GNSS芯片成本较低,使用手机端的GNSS原始伪距受到的影响则更为明显。为改善复杂场景下智能手机的伪距观测值质量,提高智能手机定位可靠性与精度,基于载波和多普勒平滑伪距的算法应运而生。
受占空比影响,智能手机难以获取理想的载波相位观测值,此时可通过多普勒观测值平滑伪距,来提升智能手机卫星定位精度。在没有占空比限制时,利用载波相位观测值平滑伪距能够获得更加可靠的手机卫星定位结果。
2 平滑伪距原理
2.1 载波相位平滑伪距
载波平滑伪距方法由Hatch[2]首次提出,其在测量型新接收机上的应用已得到较多验证,但在智能手机端仍需进行研究。
载波平滑伪距模型如下:
(13)
(14)
(15)
dPn=λ(Φn-Φn-1),n>1
(16)

载波相位平滑伪距单点定位算法中,在初始历元令平滑伪距值等于原始伪距值,在后续历元对载波相位双差值和伪距双差值进行检测,选取粗差探测的阈值,不存在双差值则重置平滑。剔除粗差后带入平滑公式,最后调用伪距单点定位。
2.2 多普勒平滑伪距
智能手机端接收卫星信号存在信号失锁的现象,同时也存在多普勒效应,当智能手机距离卫星较远时,fd为负数,信号中心频率f比所接收的载波频率fr高,载波相位的真实值会小于频率f的载波相位测定值,并且距离测量结果增大,反之,如果卫星与智能手机的距离较近,则为正。当信号中心频率f比接收的载波频率fr低,所述载波相位距离测定结果减小。通过对多普勒频率fd偏移与时间的积分,可以获得积分多普勒dφk,而积分多普勒则是指在积分区中的载波相位的改变,也就是卫星与智能手机的载波距离的改变。用积分多普勒法来处理原始伪距,可以获得比较稳定的伪距。
fd=fr-f
(17)
(18)
(19)
(20)

3 实验与结果分析
3.1 实验区域
实验采用原理部分所述的伪距单点定位算法和载波相位和多普勒平滑伪距单点定位算法,对华为Mate30智能手机采集的GNSS静态和动态下的原始数据进行处理,分析平滑伪距算法对伪距单点定位算法定位性能的影响。
如图1所示,该图展示了静态和动态实验的实验过程。从图1(a)中可以看出,智能手机屏幕向上放置在对中完成的三脚架下。本次实验于2021年12月8日在中国矿业大学第二运动场进行,使用Geo++ RINEX Logger软件记录GNSS原始观测数据。采用的智能手机型号为华为Mate30,接收机型号为天宝R10,手机和接收机数据频率均为1 Hz,数据采集时长为60 min。静态实验的参考结果为天宝R10接收机60 min数据后处理静态精密单点定位的解算结果,其解算精度达到厘米级,可以作为静态模式下手机伪距单点定位的参考解。动态实验中智能手机与接收机(流动站)固定在一起。其余相关设置均与静态实验相同,数据采集时长为30 min左右。动态实验的参考结果为后处理RTK结果。RTK解算软件采用上海天文台张益泽博士研发的Net_Diff软件,对两台天宝R10接收机(基准站和流动站)原始数据进行后处理RTK模式处理,解算精度达到厘米级,可以作为动态模式下手机伪距单点定位的参考解。
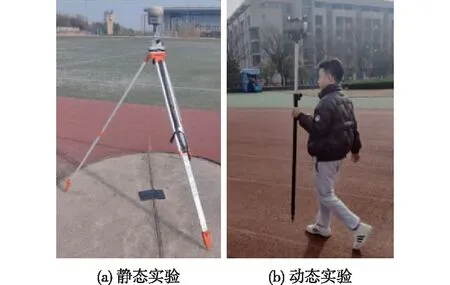
图1 华为Mate30手机静态和动态测量实验
3.2 结果分析
3.2.1 载波相位平滑结果
图2展示了华为Mate30静态载波相位平滑伪距单点定位和伪距单点定位的位置误差曲线。该图中红色曲线表示未进行载波相位平滑的伪距单点定位位置误差曲线,蓝色曲线表示进行载波相位平滑的伪距单点定位位置误差曲线。从图中可以看出:① 与蓝色曲线相比,在E方向和N方向的红色曲线突刺较大;② 在U方向,蓝色曲线与红色曲线突刺大小相当。与伪距单点定位算法相比载波相位平滑伪距单点定位算法的平面定位精度更高,这是因为载波相位平滑伪距后,可以削弱多路径误差对伪距的影响,也可以减小伪距的观测噪声。

图2 华为Mate30静态相位平滑伪距单点定位结果
表1展示了华为Mate30静态载波相位平滑伪距单点定位和伪距单点定位位置误差的RMS统计值。可以看出:① 华为Mate30智能手机未进行载波相位平滑的伪距单点定位位置误差的RMS值在E方向上为1.992 m、在N方向上为2.062 m,在U方向上为3.937 m;② 华为Mate30智能手机已进行载波相位平滑的伪距单点定位位置误差的RMS值在E方向上为1.938 m、在N方向上为1.933 m,在U方向上为3.939 m。与未进行载波相位平滑的伪距单点定位策略相比,进行载波相位平滑后的伪距单点定位策略在E方向和N方向的位置精度上分别提升了2.7%、6.2%,两者在U方向的位置精度相当。上述实验表明,原始伪距观测值在经过载波相位平滑后有效降低了噪声影响且提升了精度。
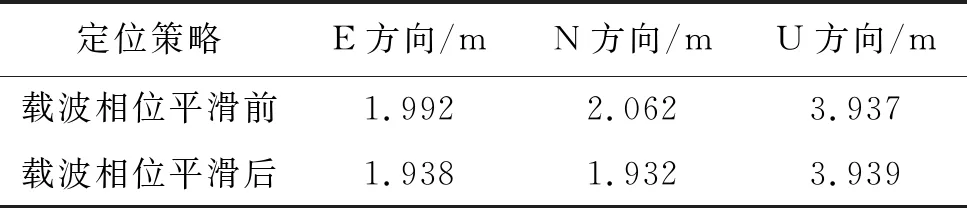
表1 华为Mate30静态相位平滑伪距单点定位前后精度对比
图3给出了华为Mate30动态载波相位平滑伪距单点定位和伪距单点定位的位置误差曲线。该图中红色曲线表示未进行载波相位平滑的伪距单点定位位置误差,蓝色曲线表示已进行载波相位平滑的伪距单点定位位置误差。从图中可以看出,在ENU 3个方向上,蓝色曲线的突刺都少于红色曲线。该现象表明,在动态环境下,载波相位平滑伪距单点定位策略的定位精度明显优于伪距单点定位策略的定位精度。这是因为载波相位平滑伪距后,可以削弱多路径误差对伪距的影响,也可以减小伪距的观测噪声。
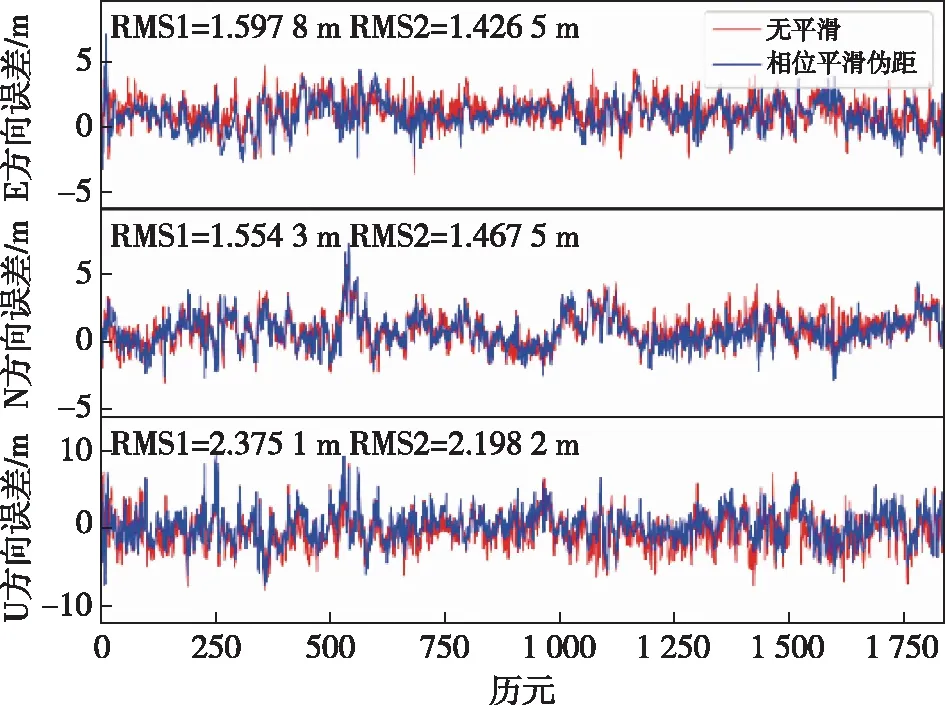
图3 华为Mate30动态相位平滑伪距单点定位结果
表2给出了华为Mate30动态载波相位平滑伪距单点定位和伪距单点定位位置误差的RMS统计结果。可以看出:① 华为Mate30智能手机未进行载波相位平滑的伪距单点定位位置误差RMS值在E方向上为1.599 m、在N方向上为1.554 m,在U方向上为2.375 m;② 已进行载波相位平滑的伪距单点定位位置误差的RMS值在E方向上为1.427 m、在N方向上为1.468 m,在U方向上为2.198 m。与未进行载波相位平滑的伪距单点定位策略相比,进行载波相位平滑后的伪距单点定位策略在E方向、N方向和U方向的位置精度上分别提升了10.7%、5.6%、17.7%。上述实验表明,原始伪距观测值在经过载波相位平滑后有效降低了噪声影响且提升了精度。

表2 华为Mate30动态相位平滑伪距单点定位前后精度对比
3.2.2 多普勒平滑伪距结果
图4展示了华为Mate30静态多普勒平滑伪距单点定位和伪距单点定位的位置误差曲线。该图中红色曲线表示未进行多普勒平滑的伪距单点定位位置误差曲线,蓝色曲线表示进行多普勒平滑的伪距单点定位位置误差曲线。
表3展示了华为Mate30静态多普勒平滑伪距单点定位和伪距单点定位位置误差的RMS统计值。可以看出:① 华为Mate30智能手机未进行多普勒平滑的伪距单点定位位置误差的RMS值在E方向上为1.992 m,在N方向上为2.062 m,在U方向上为3.937 m。② 华为Mate30智能手机进行多普勒平滑后的伪距单点定位位置误差的RMS值在E方向上为1.939 m,在N方向上为2.077 m,在U方向上为3.800 m。与未进行多普勒平滑的伪距单点定位策略相比,进行多普勒平滑后的伪距单点定位策略在E方向的位置精度上提升了2.7%,两者在N方向和U方向的位置精度相当。上述实验表明,原始伪距观测值在经过多普勒平滑后有效降低了噪声影响且提升了精度。

表3 华为Mate30静态多普勒平滑伪距单点定位前后精度对比
华为Mate30动态多普勒平滑伪距单点定位和伪距单点定位的位置误差曲线图被展示在图5中,红色曲线表示未进行多普勒平滑的伪距单点定位位置误差曲线,蓝色曲线表示进行多普勒平滑后的伪距单点定位位置误差曲线。由图5可知,在ENU 3个方向上,蓝色曲线的突刺都小于红色曲线的突刺。该现象表明,在动态环境下,多普勒平滑伪距单点定位策略的定位精度明显优于伪距单点定位策略的定位精度。这是因为多普勒平滑伪距后,可以削弱多路径误差对伪距的影响,也可以减小伪距的观测噪声。
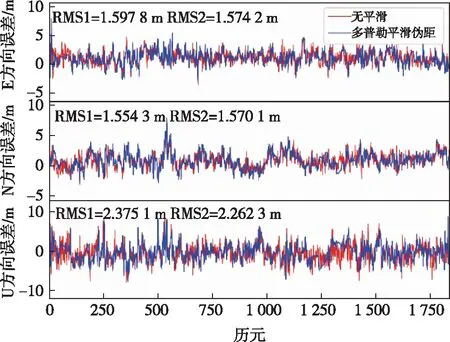
图5 华为Mate30手机动态多普勒平滑伪距单点定位结果
华为Mate30动态多普勒平滑伪距单点定位和伪距单点定位位置误差的RMS统计值被展示在表4中。从表中可以看出:① 华为Mate30智能手机未进行多普勒平滑的伪距单点定位位置误差的RMS值在E方向上为1.598 m,在N方向上为1.554 m,在U方向上为2.375 m;② 华为Mate30智能手机进行多普勒平滑后的伪距单点定位位置误差的RMS值在E方向上为1.574 m,在N方向上为1.570 m,在U方向上为2.262 m。与未进行多普勒平滑的伪距单点定位策略相比,进行多普勒平滑后的伪距单点定位策略在E方向和U方向的位置精度上分别提升了1.5%和4.7%,两者在N方向的位置精度相当。上述实验表明,原始伪距观测值在经过多普勒平滑后有效降低了噪声影响且提升了精度。

表4 华为Mate30动态多普勒平滑伪距单点定位前后精度对比
4 总 语
本文首先介绍了GNSS伪距单点定位原理,然后根据智能手机伪距观测值质量较差特点引入载波相位平滑伪距和多普勒平滑伪距,并通过华为Mate30采集的静态数据和动态数据对伪距单点定位、载波相位平滑后的伪距单点定位和多普勒平滑后的伪距单点定位3种策略进行了对比分析,实验结果表明,与未进行载波相位平滑的伪距单点定位策略相比,进行载波相位平滑后的伪距单点定位策略在E方向、N方向和U方向的位置精度上分别提升了10.7%、5.6%、17.7%,与未进行多普勒平滑的伪距单点定位策略相比,进行多普勒平滑后的伪距单点定位策略在E方向和U方向的位置精度上分别提升了1.5%和4.7%,实验表明,原始伪距观测值在经过载波相位和多普勒平滑后有效降低了噪声影响进而提升精度。
