AN/SPS-74雷达性能分析
2019-03-19皇甫一江
皇甫一江
(海军装备部信息系统局,北京 100841)
0 引 言
20世纪美军启动了自动雷达潜望镜探测和识别计划(ARPDD),用于论证机载条件下自动潜望镜探测能力,随后发展到舰载条件[1]。
近年来美国海军逐渐由深海向近海转移,利用主被动声纳实现反潜的方式在近海区域受到限制,针对美军“尼米兹”系列航母反潜作战需要,2006年8月美军启动了舰载潜望镜探测雷达系统研究计划。该计划的目的是在低虚警概率条件下探测暴露时间极短的潜望镜目标。
本文针对美军这一专用雷达的发展历史、功能特点以及性能进行了初步分析。
1 AN/SPS-74研制历程
AN/SPS-74雷达来源于AN/APS-116、AN/APS-137机载反潜搜索雷达,1996年开始,海军研究部(ONR)先进雷达潜望镜检测和识别计划(ARPDD)工作人员就开始周期性地部署和密集测试处于发展阶段的试验系统。美军舰载反潜雷达发展路线如图1所示。
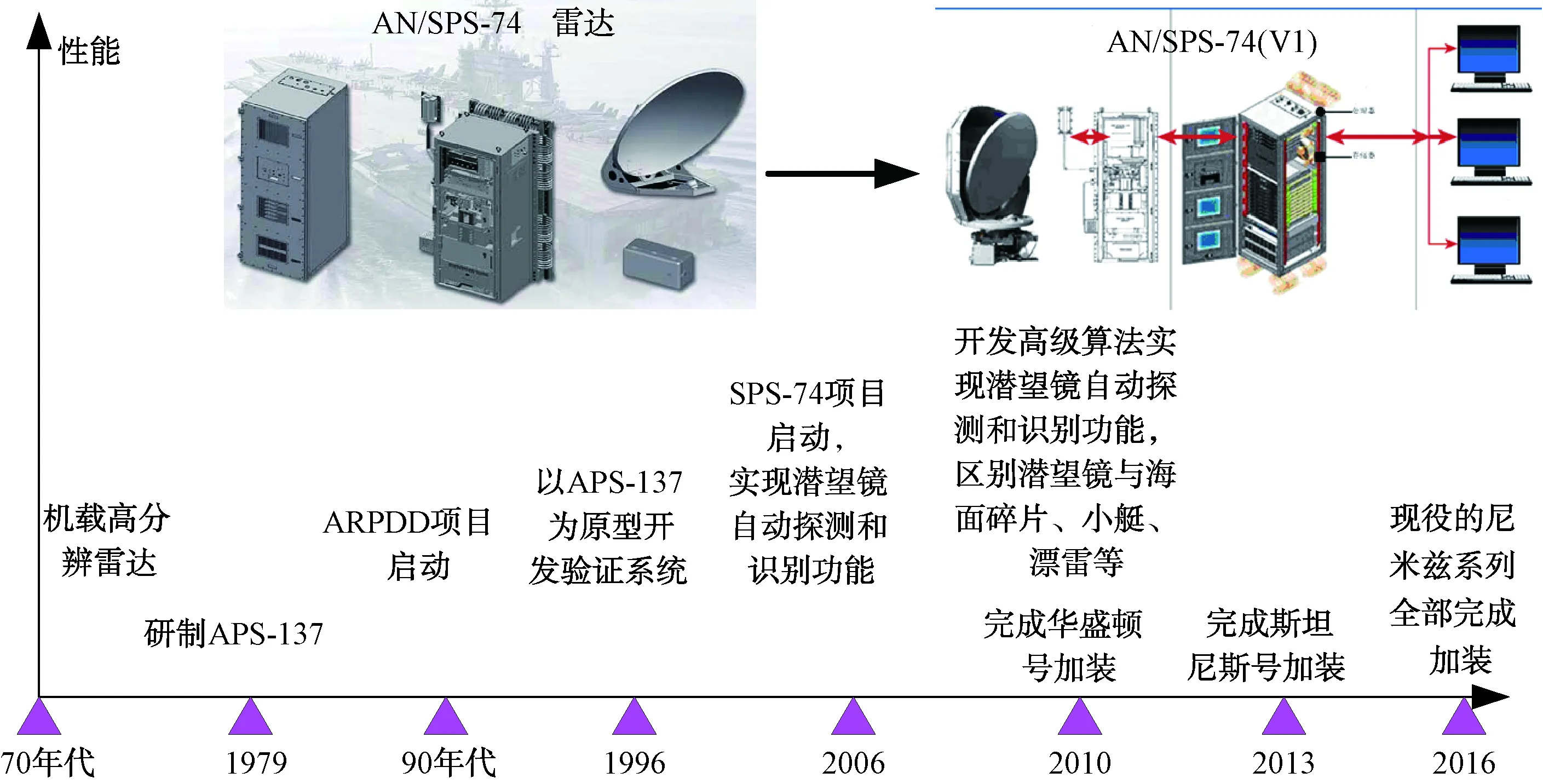
图1 美军舰载反潜雷达发展路线图
从2008年4月起,AN/SPS-74测试小组对试验雷达系统进行了测试,测试环境是存在潜艇和类似潜艇目标的环境[2]。
2009年1月开始在横须贺基地“华盛顿”航母上为该雷达进行了4个月的改装,新安装的AN/SPS-74雷达可为“华盛顿”号航母提供探测潜艇潜望镜的能力。美军计划为10艘“尼米兹”级航空母舰全部加装该雷达系统。
截止到2016年,美军已完成该雷达在“华盛顿”号“斯坦尼斯”号等航母上的加装,如图2所示。
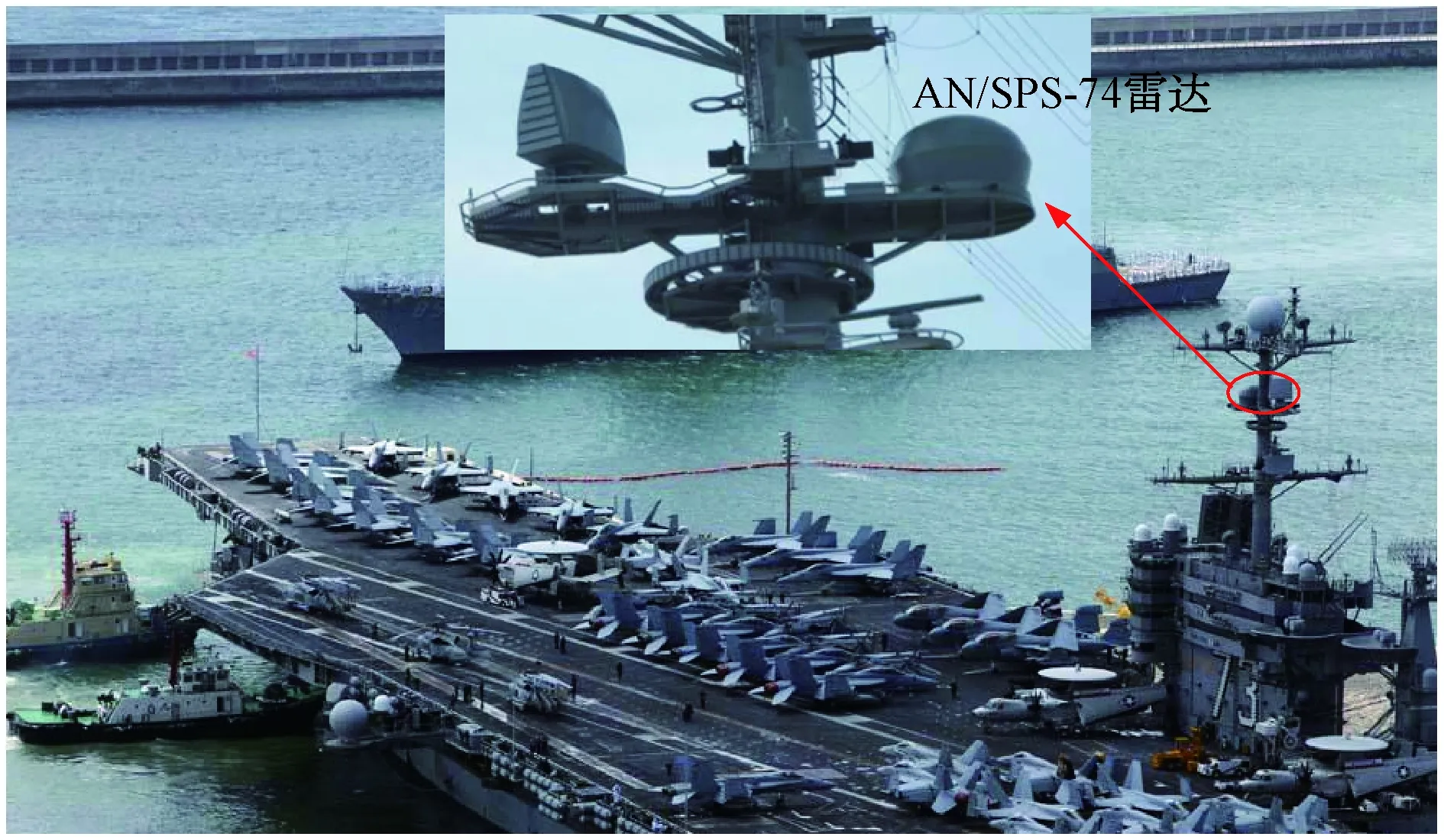
图2 “华盛顿”号航母加装该雷达后
2 功能特点
该雷达系统由2个空气冷却的机柜(1个用于收发机柜,1个用于雷达数据处理)、1个位于甲板的天线单元等组成。其组成如图3所示。

图3 AN/SPS-74雷达
位于甲板上的天线单元由一个稳定基座上的旋转天线罩、机械稳定反射面天线组成。AN/SPS-74雷达天线罩与处理机柜实物如图4所示。

图4 雷达天线罩与机柜
潜艇的潜望镜具有机构尺寸小、雷达有效反射面积较小(典型值为1 m2)、架高较低、相对于海面是静止或者做零速运动且露出水面的时间较短的特性[3]。从潜望镜特性可知,该雷达需要重点解决强海杂波背景下潜望镜类“低小慢”目标检测问题。
经初步资料搜集,该雷达具备以下特点和工作参数:
(1) 专门用于潜望镜目标探测,海杂波抑制能力较强,小目标探测距离远(最大44.448 km);
(2) X波段雷达,机械稳定平台;
(3) 天线转速较高,方位波宽约2.4°;
(4) 瞬时信号带宽大于400 MHz;
(5) 采用扫描间积累技术抑制海杂波。
3 初步性能分析
3.1 X波段海杂波特性
较低的信杂比是制约雷达对该类目标探测的最主要因素。提高信杂比的主要手段是对海杂波进行有效抑制,主要途径有2个:一是降低海杂波强度,二是降低海杂波的相关性[4]。
海杂波雷达截面(RCS)计算公式为:
σ=σ0RθAcτsecψ/2
(1)
式中:σ0为海面后向散射系数;R为观测距离;θA为方位波束宽度;τ为脉冲宽度,脉压方式下,cτ/2为脉压后宽度,即为雷达的距离分辨力;ψ为掠射角。
由此可见,海杂波RCS和雷达距离分辨力存在着直接的关系,在距离高分辨力的情况下,由于海杂波照射面积的减小使得海杂波RCS值随之降低,实现了单个距离分辨单元内海杂波强度的减小。
从图5实测的IPIX雷达的海杂波时间相关性分析可知,X波段海杂波的相关时间远大于雷达的重复周期,因此脉冲间积累对信杂比的改善受到海杂波相关性的严重限制。帧间时间远大于脉冲间时间,海杂波已基本不相关,因此采用帧间积累能够杂波去相关,提高信杂比[5]。
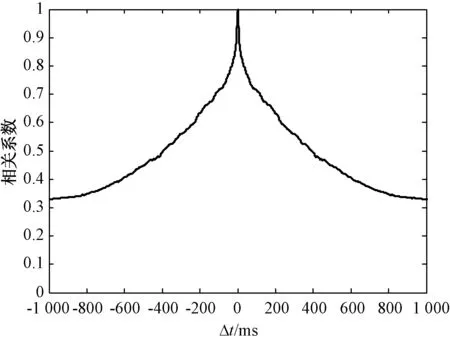
图5 X波段IPIX雷达海杂波相关性
3.2 低小慢目标检测技术
由于慢速弱小目标回波能量低,速度与海杂波重合,在海杂波背景中难以使用常规的多普勒处理方法对目标回波进行积累以提高信杂比,将目标与海杂波进行有效区分。
因此,该雷达系统设计的难点是如何在有限的时间和较强的海杂波背景下检测“低小慢”目标,该雷达的技术途径初步分析如下:
(1) 采用300 rpm的高转速一则为满足高数据率要求,针对短时暴露的目标高转速能够获取较多的脉冲个数;另一方面,采用高转速实现帧间积累技术可以抑制海杂波。
(2) 雷达的理论距离分辨率与潜望镜外形直径相当。
(3) 采用先进的目标识别算法,实现潜望镜识别功能,区别潜望镜与海面碎片、小艇、漂雷等。
由于潜望镜目标较小,雷达回波信号微弱,海上的小船、漂浮物都可能产生同样的回波信号,本雷达主要利用海杂波与潜望镜之间空间与时间上的特性不同来区分的[6-7],该雷达的总体框图如图6所示。

图6 原理框图
接收机接收到回波信号后,该回波信号分为3路,一路经过模/数(A/D)变换为数字信号后,进入存储设备,与预先存储的目标(潜望镜)图像特征进行匹配处理,对威胁目标进行直接识别;另外2路信号分别进入2个探测通道。
其中一个探测通道负责慢速目标自动探测,包含恒虚警处理器、帧间积累,专门用于探测慢速运动潜望镜桅杆,恒虚警率(CFAR)降低了系统对外部杂波和大目标的灵敏度,保证不变的虚警概率,第2级为M-N检测器。如图7所示。
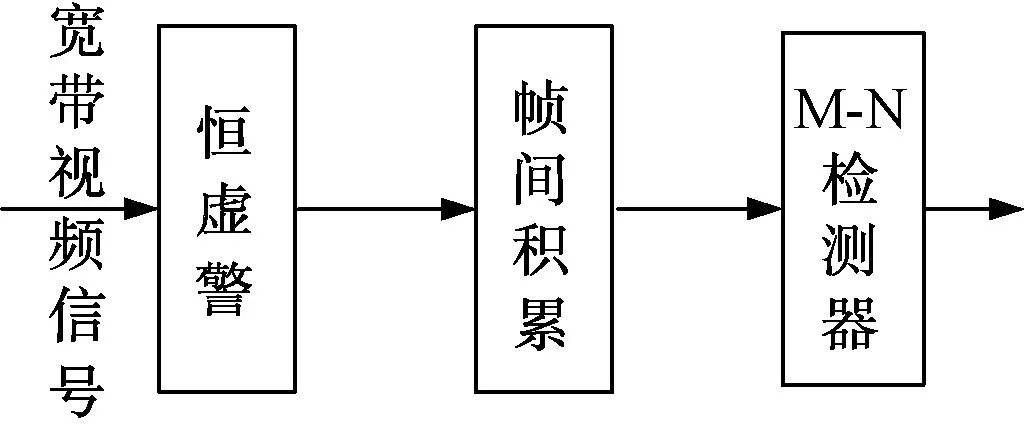
图7 慢速目标检测信号处理流程
另一个通道为快速目标探测器,包含一个具备快时间常数的一级阈值对数检测器,用于慢速通道无法检测的快速目标探测和跟踪。
帧间积累处理时,首先在脉冲间进行成组非相参积累,然后通过杂波图迭代完成帧间积累,增强时间相关性强的目标回波,抑制时间相关性弱的海杂波,大大提升了回波信杂比,有利于海面小目标检测。
假定搜索空域划分为N个距离单元、M个方位单元,则成组非相参积累的数学表达式为:
(2)
式中:Dn,m为距离-方位单元(n,m)内的脉冲积累数据,该距离-方位单元占有I个距离分辨单元和J个脉冲;xn+i,m+j为该距离-方位单元内第j个脉冲、第i个距离分辨单元上的原始回波幅值[8]。
将距离-方位单元作为杂波图单元,对每个杂波图单元内的脉冲积累数据Dn,m进行杂波图迭代处理,原理框图如图8所示。
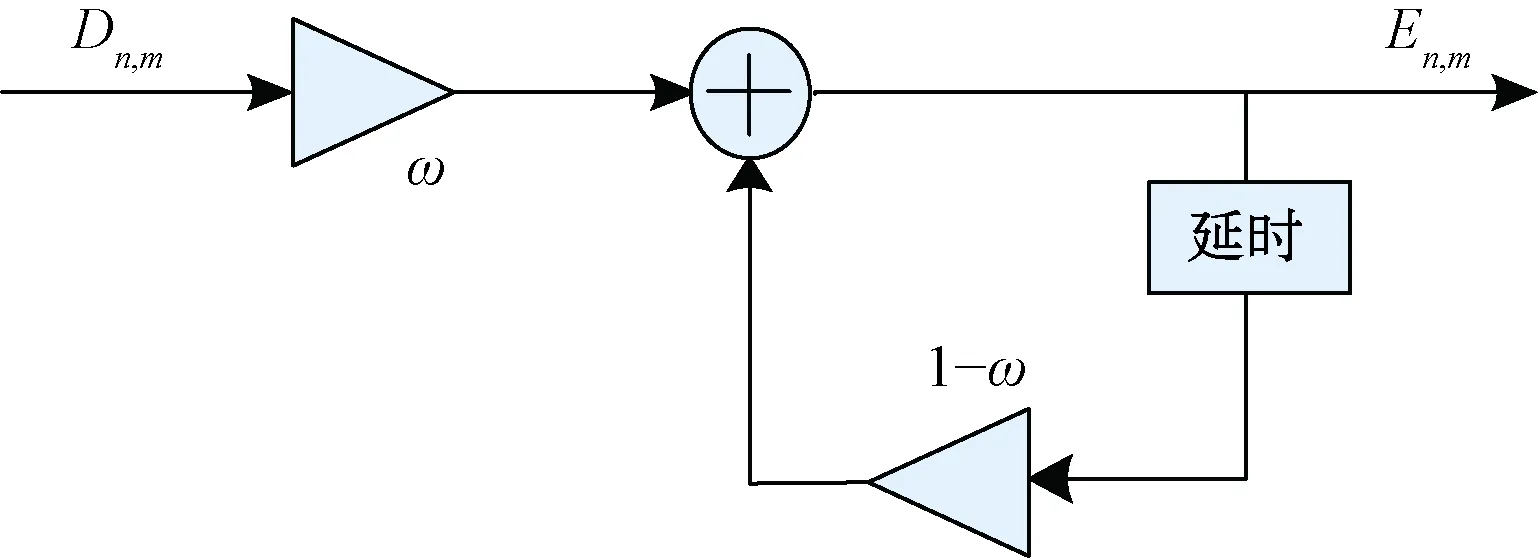
图8 杂波图迭代技术原理框图
可以看到,杂波图迭代采用一阶递归滤波器来实现,Dn,m为成组非相参积累处理后的脉冲积累数据,En,m为杂波图迭代处理后的帧间积累数据,其中加权系数ω的取值范围为0<ω<1。杂波图迭代的数学表达式如下:
En,m(l)=(1-ω)En,m(l-1)+ωDn,m(l)
(3)
将公式展开,得:
(4)
式中:En,m(l)为杂波图单元(n,m)内第l次扫描得到的迭代处理结果;ω为加权系数;Dn,m(l)为该杂波图单元内第l次扫描的脉冲积累数据,是时变的。
3.3 数据仿真与试验验证
3.3.1 仿真验证
项目组录取了真实的海杂波数据,用于理论分析计算,试验时海情2~4级,验证该雷达所采用技术的可行性。
原始杂波图像参数:目标距离为3.7 km,录取时间60 s,信杂比约2.5 dB,如图9所示。
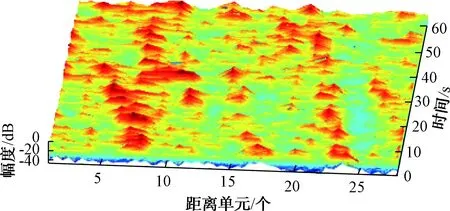
图9 原始杂波图像
按照非相参积累处理后,由于杂波和目标同时积累,目标不能有效检测出来。采用该技术的检测结果如图10所示。
图10 采用非相参积累处理
天线转速按150 rpm计算,每个周期为0.4 s,经间隔6 s、15点帧间积累后的数据结果如图11所示。可以看出,在其他距离单元上,依然存在较多的尖峰,且能量较大。若只使用门限检测,较高的门限会导致无法检测目标,较低的门限会导致虚警抬高。
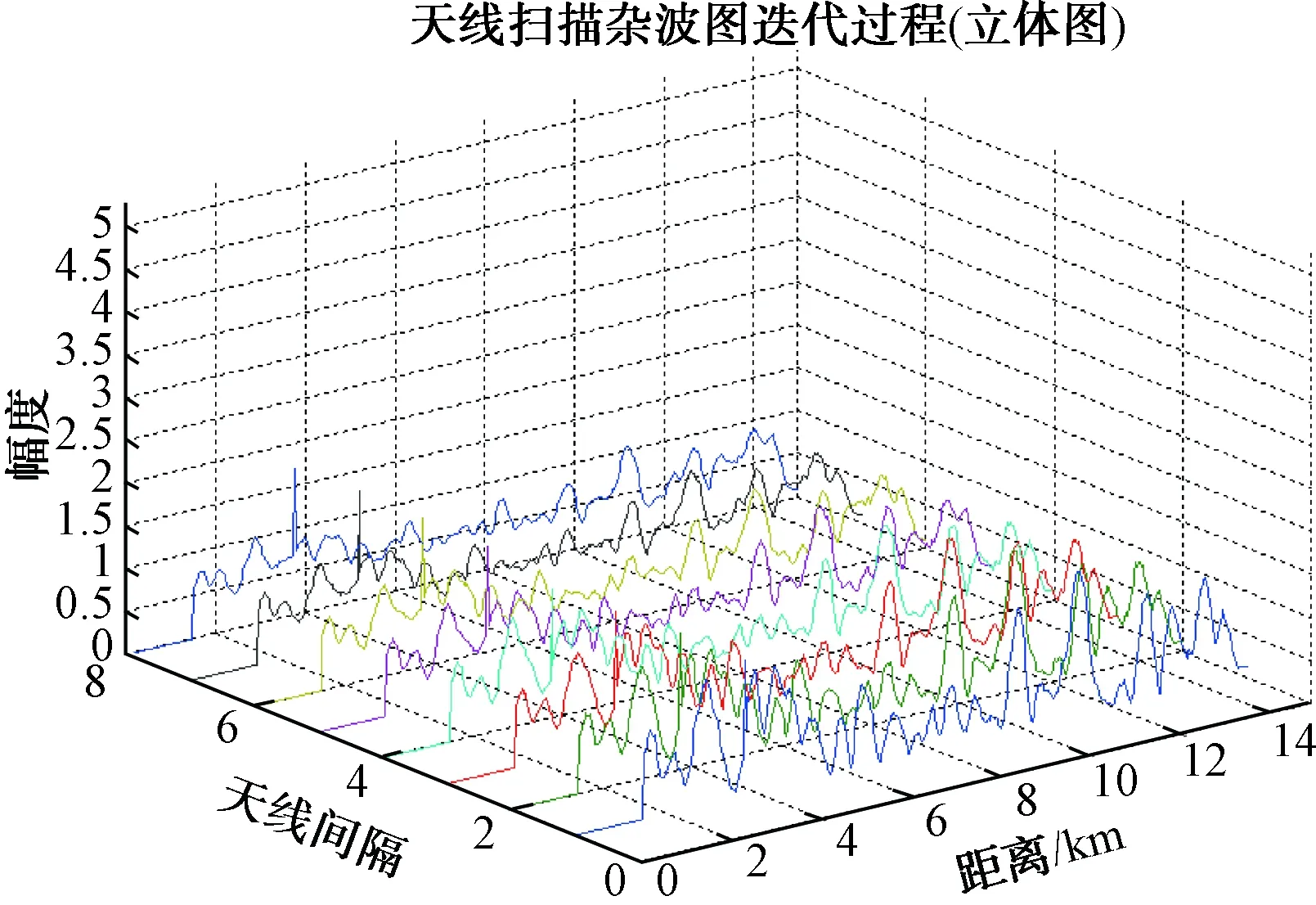
图11 帧间积累后数据
M-N检测器利用海尖峰在时间上不持续,但目标存在持续性的特点。海尖峰在M次检测中只有少数几次超过门限,而目标超过门限的次数较多。利用这种特性判断目标,降低虚警,保证小RCS目标的检测。
在帧间积累后增加一级M-N检测器,即进行M次检测,如果有N次超过门限,则认为目标存在。
对图11的数据设置门限后,卡掉噪声和一部分杂波,同时取出尖峰和目标,然后进行连续7次检测,如果有4次超过门限,则认为存在目标。处理结果如图12所示。
图12 最终检测结果
3.3.2 试验验证
利用上述X波段试验平台对慢速移动/静止的小目标进行了实际的外场试验验证。
试验条件如下:风力5~6级,海情可按4级估算,设备架高约15 m,一个 RCS为0.1 m2的标准反射体作为试验目标,其实际有效架高约0.5 m,悬浮置于海表面,用一艘小橡皮艇慢速拖曳。
采用常规非相参技术处理后,海杂波较多,小目标淹没在海杂波中无法识别,如图13(a)所示,标准反射体小目标在方框内,方框表示录取波门,仅波门内的点迹数据被检测录取。采用该雷达技术处理后,海杂波被完全抑制掉,帧间积累次数为15,如图13(b)所示,方框中的强散射点即为小型标准反射体目标,圆框内的散射点为橡皮艇目标。
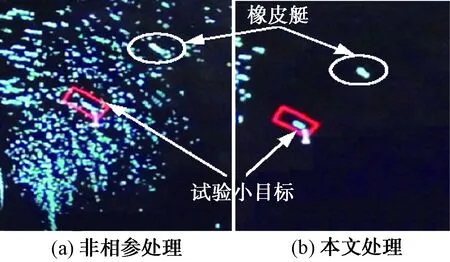
图13 试验结果
理论仿真和试验均验证了该雷达所采用的技术措施能够有效抑制海杂波和海尖峰,提取杂波背景下潜望镜类小目标以及其他静止、慢速目标。
4 结束语
本文针对美军航母最近几年加装的舰载反潜雷达——AN/SPS-74雷达的研制过程、功能特点进行了分析,并对潜望镜类低小慢目标的检测技术进行了分析,使用实测雷达数据进行了理论仿真,并进行了外场验证,证实该技术的可行性和有效性,使用该技术能够很好地完成强杂波背景下潜望镜类海面“低小慢”目标的低虚警检测。不足之处是受限于试验平台和试验条件,不能完全模拟潜望镜目标和该雷达参数。